使用飞行回顾进行日志分析
飞行回顾 飞行记录可用于分析载具的总体状况。
曲线图的含义不言自明,但要知道哪些范围是可以接受的以及曲线图应该是什么样子,还需要一些经验。本页将介绍如何解释曲线图和识别常见问题。
一般用法
许多地块的共同特征:
- 绘图背景颜色用于显示记录期间的飞行模式(图形取决于模式):
- 飞行模式 图体上的背景颜色表示飞行模式。将鼠标悬停在曲线图上会显示飞行模式标签。
- VTOL 飞行模式: VTOL 飞行器还会在图的底部以背景色显示 VTOL 模式(蓝色表示多旋翼飞行器,黄色表示固定翼飞行器,红色表示过渡模式)。
- 鼠标滚动特定的绘图轴可缩放该轴(水平或垂直)。
- 鼠标在图中滚动可缩放两个坐标轴。
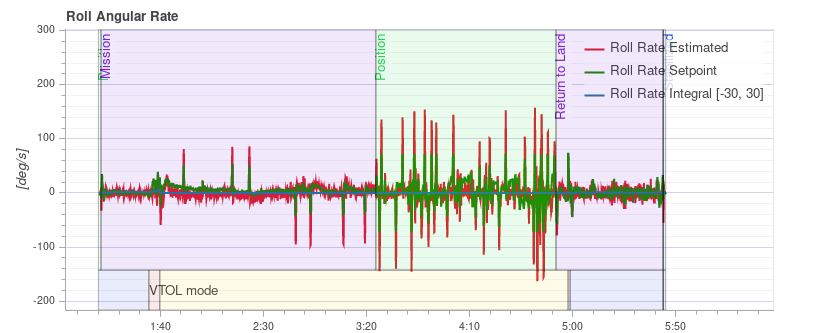
PID 跟踪性能
根据飞行模式,飞行器控制器可尝试跟踪位置、速度、高度或速率设定点(跟踪的设定点取决于模式,例如:在稳定模式下没有速度设定点)。
估计值 线(红色)应与 设定点 (绿色)。如果没有,则大多数情况下需要调整控制器的 PID 增益。
多旋翼飞行器 PID 调整指南 包含示例图和有关跟踪性能分析的信息。
特别是对于速率控制器,启用高速率记录配置文件 (SDLOG_PROFILE),以便在放大时获得更多细节。
振动
振动是多旋翼飞行器最常见的问题之一。高振动水平可能导致
- 飞行效率降低,飞行时间缩短
- 电机会发热
- 材料磨损加剧
- 无法对飞行器进行严格调整,导致飞行性能下降。
- 传感器削波
- 位置估计失败,可能导致飞航。
因此,必须密切关注振动水平,并在必要时改进设置。
在某一点上,振动级别显然过高,一般来说,振动级别越低越好。不过,在'一切正常'和'振动水平过高'之间有一个很大的范围。这个范围取决于很多因素,包括载具尺寸,因为大型载具的惯性更大,允许更多的软件过滤(同时大型载具的振动频率更低)。
以下段落和章节介绍了用于检查振动水平的绘图以及如何对其进行分析。
在分析振动时,值得查看多个图表(不同的图表能更好地突出某些问题)。
执行器控制 FFT
您需要启用高速率日志记录配置文件 (SDLOG_PROFILE)来查看这一情节。
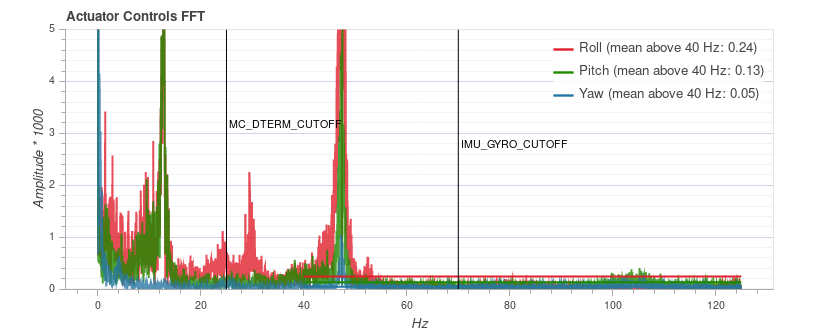
该图显示了根据执行器控制信号(速率控制器的 PID 输出)绘制的滚轴、俯仰轴和偏航轴的频率图。它有助于识别频率峰值和配置软件滤波器。最低端应该只有一个峰值(低于 20 赫兹左右),其余部分应该较低且平缓。
请注意,不同载具的 Y 轴缩放比例不同,但同一载具的日志可以直接相互比较。
举例说明:良好的振动
QAV-R 5" Racer 框架(振动极佳)。
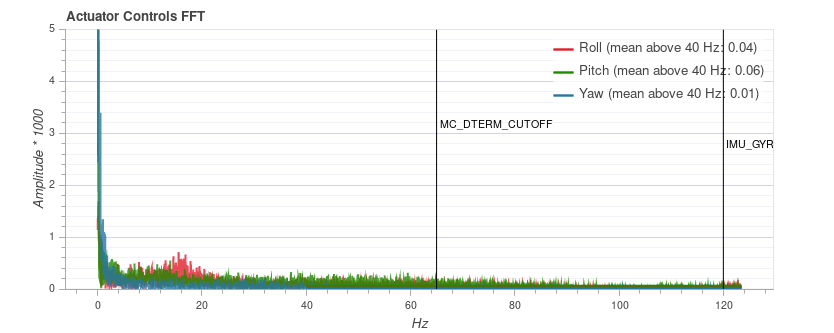
上述框架出色的振动特性意味着,我们可以大大提高该系统的截止频率。 软件过滤器 (减少控制延迟)。
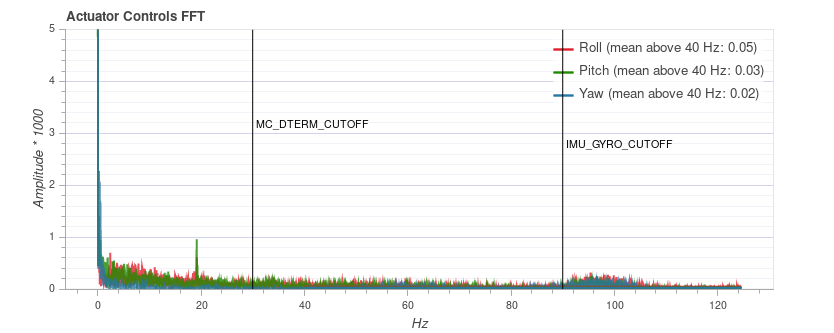
DJI F450 机架(振动良好)。
S500 机架:
虽然上述情节看起来不错,但 同一航班的原始加速度图 这很好地说明了为什么要检查多个图表!
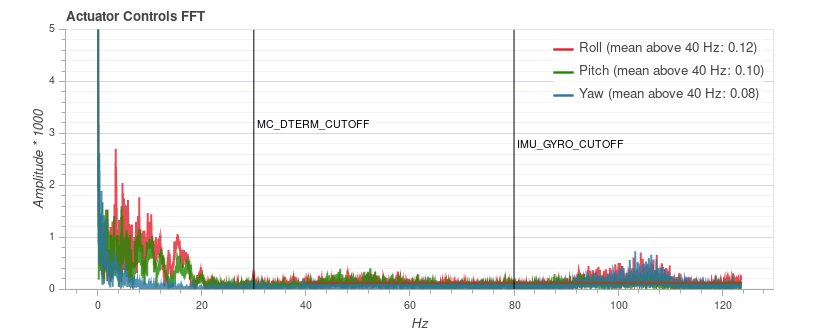
实例:不良振动
本例显示频率峰值接近 50 赫兹(在本例中是由于起落架松动造成的)。
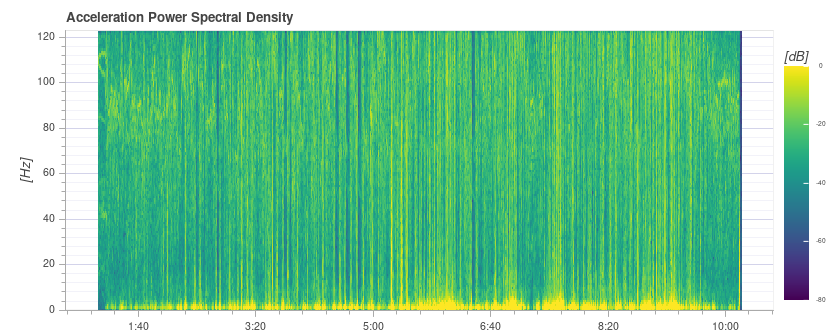
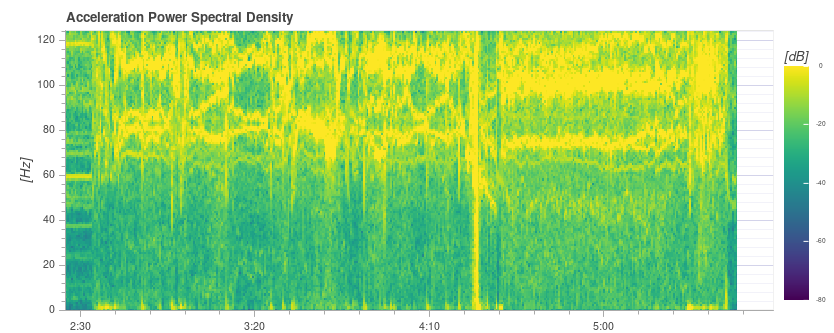
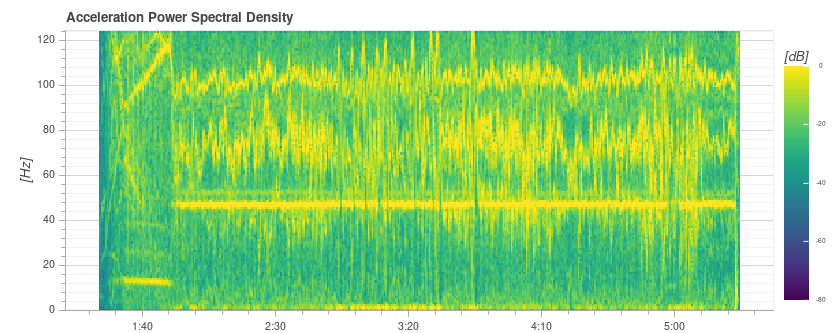
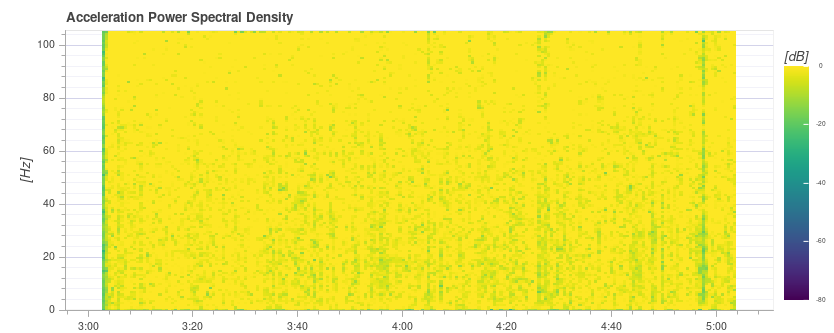
加速度功率谱密度
这是一个二维频率图,显示加速度计原始数据随时间变化的频率响应(显示 x、y 和 z 轴的总和)。黄色区域越多,表示该时间和频率下的频率响应越高。
理想情况下,只有几赫兹以内的最低部分是黄色的,其余大部分是绿色或蓝色。
举例说明:良好的振动
QAV-R 5" Racer 框架(振动极佳)。
DJI F450 机架(振动良好)。
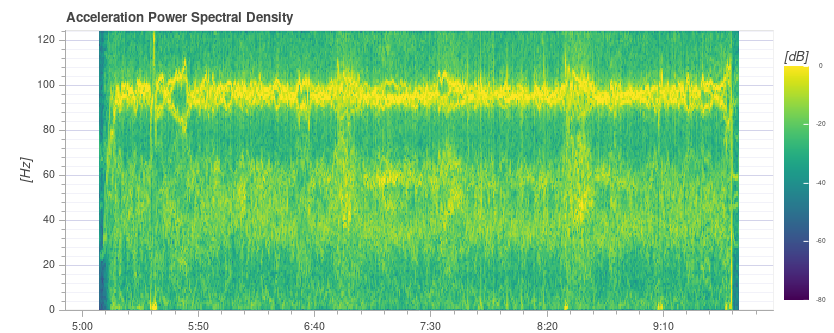
从上图可以看出,螺旋桨的叶片通过频率约为 100 赫兹。
S500 机架:
实例:不良振动
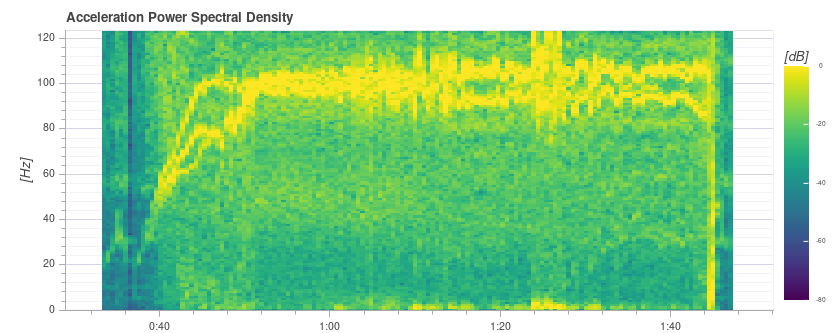
100Hz 左右的黄色强线表明存在潜在问题,需要进一步调查(从查看其他图表开始)。
下图显示了一个接近 50 赫兹的频率峰值(在这种情况下是由于起落架松动造成的)。
这表明可能存在问题,因为它是接近载具动态的单个强低频。在 80 Hz 的默认滤波器设置下,50 Hz 的振动不会被滤除。
极高(不安全)振动!请注意,图表几乎完全是黄色的。
您不应该在振动如此强烈的情况下飞行。
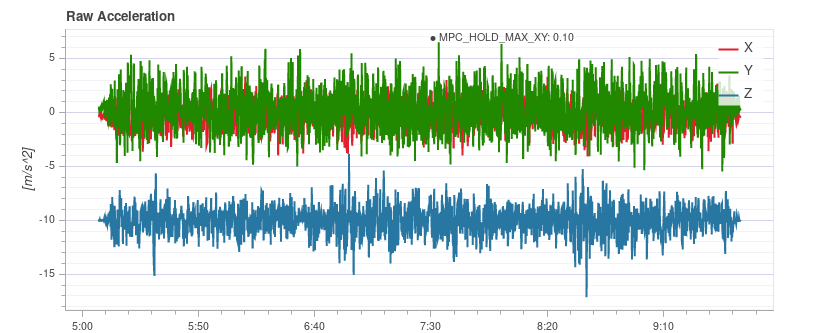
原始加速度
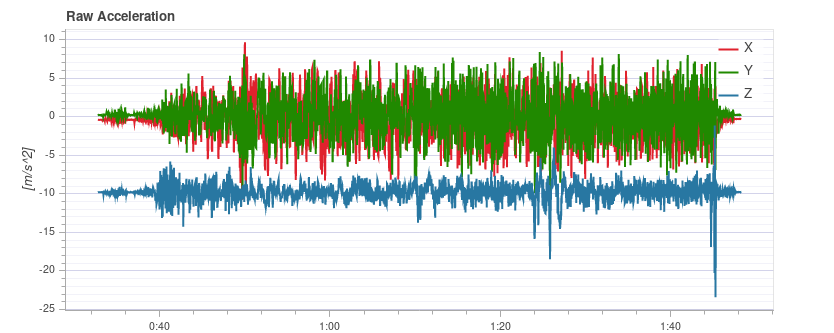
该图显示 x、y 和 z 轴的原始加速度计测量值。理想情况下,每条细线都能清晰显示载具的加速度。
根据经验,如果悬停或慢速飞行时 Z 轴图形与 X/Y 轴图形相碰,则说明振动级别过高。
使用此图的最佳方法是放大到载具盘旋的部分。
举例说明:良好的振动
QAV-R 5" Racer 框架(振动极佳)。

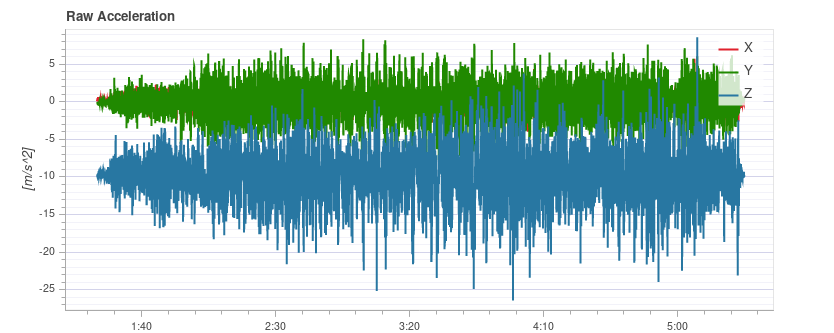
DJI F450 机架(振动良好)。
实例:不良振动
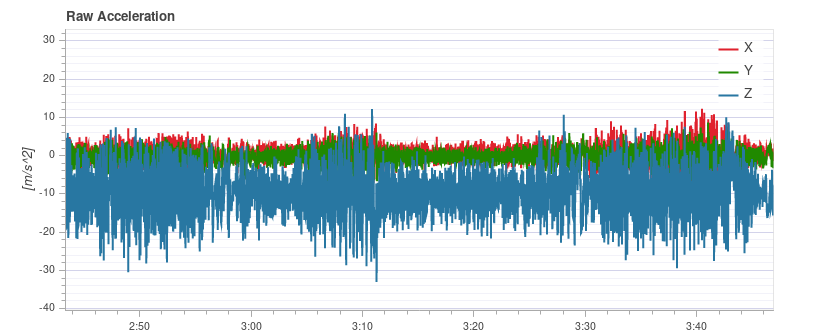
S500 机架。边缘振动水平--X 和 Y 偏高(这是 S500 机身的典型振动水平)。这是开始对飞行性能产生负面影响的极限。
振动过大。注意 Z 轴图形与 X/Y 轴图形的重叠情况:
振动级别过高。注意 z 轴图形与 x/y 轴图形的重叠情况:
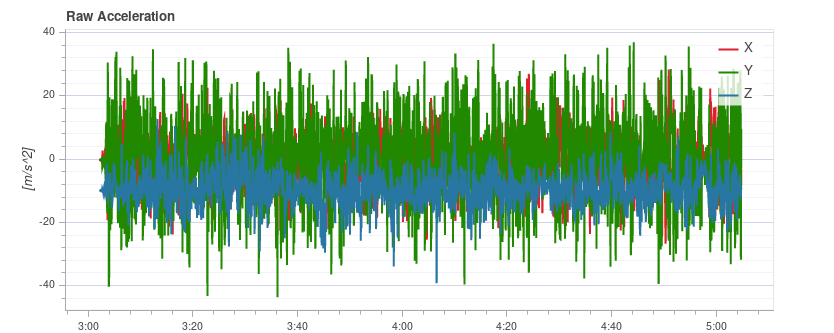
极高(不安全)的振动级别。
您不应该在振动如此强烈的情况下飞行。
修复振动问题
通常情况下,仅从日志中无法确定振动源(或多个振动源的组合)。
在这种情况下,应对载具进行检查。 振动隔离 解释了您可以检查(和做)的一些基本事项,以降低振动水平。
致动器输出
致动器输出 图中显示了发送到各个执行器(电机/伺服器)的信号。一般来说,它的范围介于 PWM 配置的最小值和最大值之间(例如,从 1000 到 2000)。
这是一个四旋翼飞行器的示例,其中一切正常(所有信号都在范围内,大致相互重叠,且噪声不大):
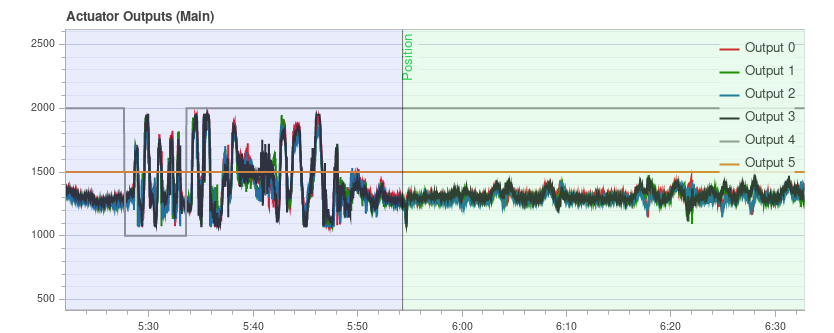
情节有助于发现不同的问题:
- 如果一个或多个信号在较长时间内处于最大值,则表示控制器遇到了以下问题 饱.这并不一定是个问题,例如在全油门飞行时就会出现这种情况。但如果在执行任务时出现这种情况,则表明飞行器的重量超过了它所能提供的推力。
- 对于多旋翼飞行器来说,如果飞行器是 失衡.从图中可以看出,相邻的一个或多个电机(四旋翼飞行器为两个)平均需要以更大的推力运行。请注意,如果某些电机提供的推力大于其他电机,或者电调没有校准,也会出现这种情况。飞行器不平衡一般问题不大,因为自动驾驶仪会自动对其进行计算。但这会降低可实现的最大推力,并对某些电机造成更大压力,因此最好平衡飞行器。
不平衡也可能来自偏航轴。曲线图看起来与前一种情况类似,但相反的电机将分别运行得更高或更低。原因可能是一个或多个电机倾斜。
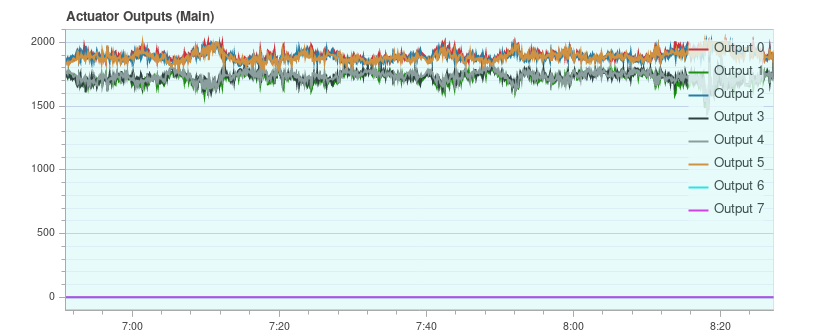
这是一个六转子的例子:1、3 和 6 号电机以较大推力运行:
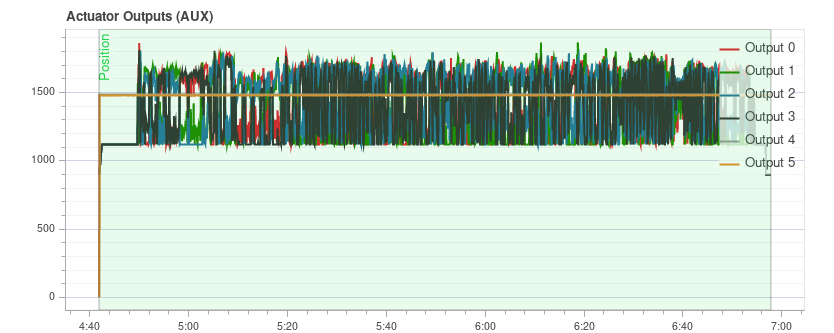
- 如果信号看起来非常 喧闹 (高振幅),其原因可能有两个:传感器噪音或通过控制器的振动(这也出现在其他图中,见上一节)或 PID 增益过高。这是一个极端的例子:
GPS 不确定性
GPS 不确定性 显示 GPS 设备的信息:
- 使用的卫星数量(应在 12 个左右或更多)
- 水平定位精度(应低于 1 米)
- 垂直定位精度(应低于 2 米)
- GPS 定位:3 表示 3D GPS 定位,5 表示 RTK 浮动类型,6 表示 RTK 固定类型
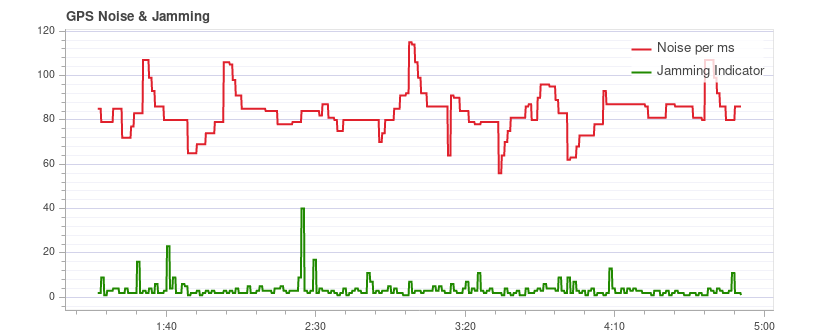
GPS 噪音和干扰
GPS 噪音和干扰图有助于检查 GPS 信号是否受到干扰。GPS 信号非常微弱,因此很容易受到(通过电缆)发射或辐射 GPS 使用频率的部件的干扰。
USB 3 是 已知 有效的 GPS 干扰源。
干扰指示器 应在 40 左右或以下。80 左右或更高的数值过高,必须对设置进行检查。信号干扰还表现为精度降低和卫星数量减少,甚至无法进行 GPS 定位。
这是一个没有任何干扰的例子:
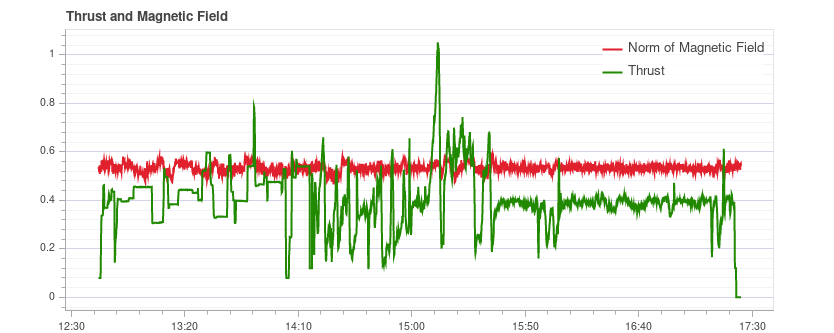
推力和磁场
推力和磁场 图中显示了磁传感器测量矢量的推力和法线。
在整个飞行过程中,正常值应该是恒定的,并且与推力无关。这就是一个很好的例子,其标准值非常接近恒定值:
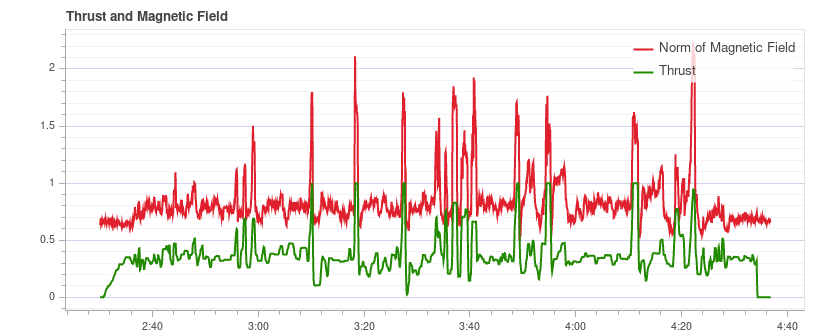
如果相关这意味着电机(或其他设备)的电流正在影响磁场。必须避免这种情况,因为这会导致不正确的偏航估计。下图显示了推力与磁力计正常值之间的密切联系:
解决办法有
- 使用外部磁力计(避免使用内部磁力计)
- 如果使用外部磁力计,则应将其移至远离强电流的地方(例如使用(较长的)GPS 杆)。
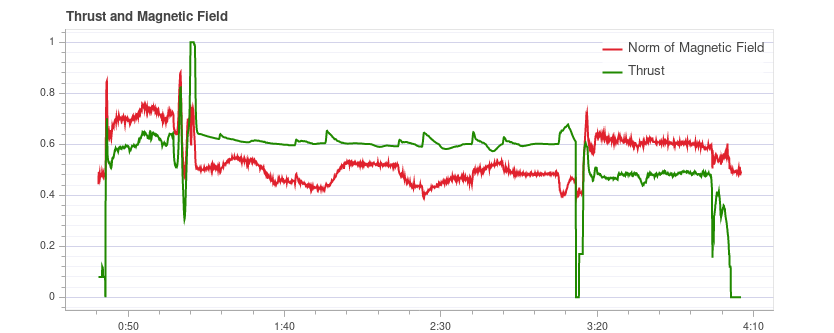
如果标准值不相关但不恒定,则很可能是校准不当。不过,这也可能是外部干扰造成的(例如在靠近金属建筑飞行时)。
这个例子表明,标准值是非恒定的,但它与推力并不相关:
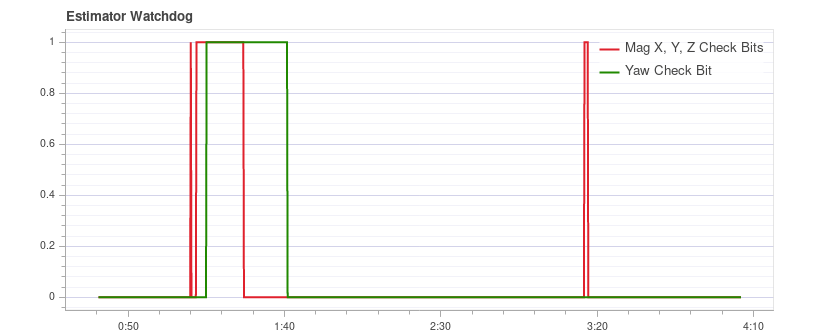
估价师看门狗
估价师看门狗 图显示估计器的健康报告。它应该恒为零。
如果没有问题,应该是这个样子:

如果其中一个标志不为零,则表示估计器发现了问题,需要进一步调查。大多数情况下,这是传感器的问题,例如磁强计干扰。查看相应传感器的曲线图通常会有所帮助。
下面是一个磁强计问题的例子:
传感器数据的采样规律性
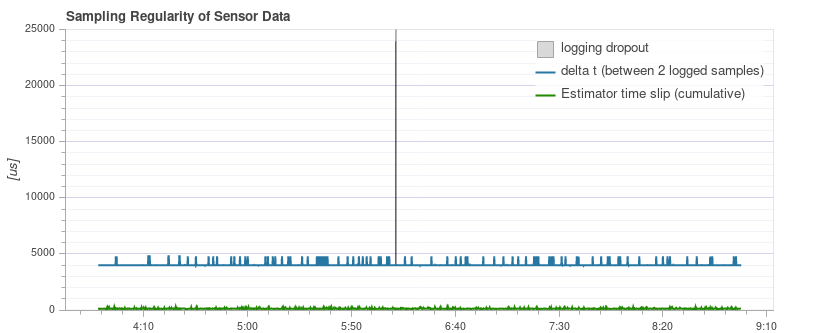
通过抽样规律图可以深入了解记录系统和调度方面的问题。
数量 记录辍学 如果日志缓冲区过小、日志记录速率过高或使用了劣质 SD 卡,则日志值会开始增加。
在中等质量的卡片上偶尔会出现掉线现象。
三角 t 显示两个记录的 IMU 采样之间的时间差。它应该接近 4 毫秒,因为数据发布速率为 250 赫兹。如果出现峰值是峰值的倍数(估算器时间滑移没有增加),则表示记录仪跳过了一些样本。这种情况偶尔会发生,因为记录仪的运行优先级较低。如果出现不是倍数的尖峰,则表明传感器驱动程序调度不正常,需要进行调查。
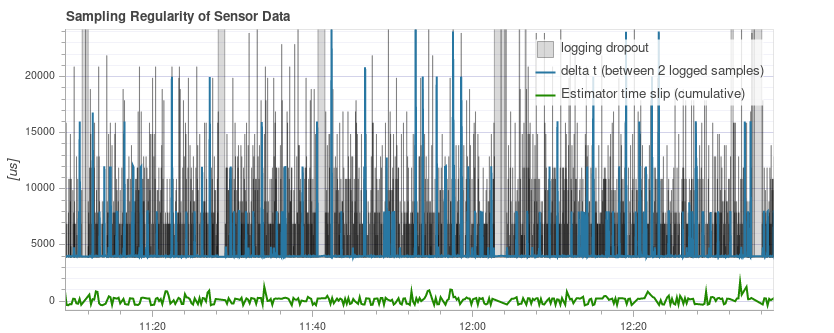
估算时间 显示的是当前时间与截至该时间的集成传感器时间间隔之间的差值。如果它发生变化,则意味着估计器错过了传感器数据,或者驱动程序发布了错误的积分时间间隔。它应该保持为零,但在飞行中参数发生变化时可能会略有增加,这通常不是问题。
这就是一个很好的例子:
下面的示例包含过多的掉线,在这种情况下使用的 SD 卡质量太低(请参阅 "SD 卡质量")。 这里 好的 SD 卡):
登录信息
这是一个包含系统错误和警告信息的表格。例如,它们会显示任务的堆栈大小不足时的信息。
这些信息需要逐一检查,并不是所有信息都能说明问题。例如,下面显示的是一次杀毒开关测试:

飞行/框架日志审查范例
在分析飞行器状况时,通常值得查看特定飞行的多个图表(不同的图表可以更好地突出某些问题)。在检查可能存在的振动问题时,这一点尤为重要。
下面的部分按航班/载具对一些(以前提供的)图表进行了分组。
QAV-R 5" Racer
这些图表都来自同一架飞机上的 QAV-R 5" Racer.
他们展示的载具振动非常小:
- 致动器控制 FFT 仅在最低端显示一个峰值,其余部分均较低且平缓。
- 频谱密度大部分为绿色,只有低频处略带黄色。
- 原始加速度的 Z 轴轨迹与 X/Y 轴轨迹完全分离。
DJI F450
这些图表都来自同一架飞机上的 DJI F450.
他们展示的载具振动很小(但没有上面的 QAV-R 那么小!):
- 执行器控制 FFT 在最低端显示出一个峰值。除了在 100Hz 左右有一个凸点(这是螺旋桨的叶片通过频率),其余大部分都是平的。
- 频谱密度大部分为绿色。叶片通过频率再次清晰可见。
- 原始加速度的 Z 轴轨迹与 X/Y 轴轨迹完全分离。
S500
这些图表均来自 S500 的同一次飞行。
这些数据显示,载具的振动几乎可以接受:
- 致动器控制 FFT 在最低端显示出一个峰值。除了在 100Hz 左右有一个凸起外,其余大部分都是平的。
- 频谱密度大多为绿色,但在 100Hz 时比 DJI F450 更黄。
- 原始加速度的 Z 轴轨迹与 X/Y 轴轨迹相当接近。这是开始对飞行性能产生负面影响的极限。