固定翼着陆
PX4 可使自动驾驶仪控制的固定翼飞机(FW)在以下地点着陆 任务, 降落模式和 返回模式.
着陆逻辑分为几个阶段,如下所示。在第一阶段,飞行器将沿着固定的轨迹(如图所示)着陆。FW_LND_ANG)朝向地面。在信号弹着陆高度 (FW_LND_FLALT),载具将开始沿着喇叭形路径行驶(曲线基于 FW_LND_HVIRT).
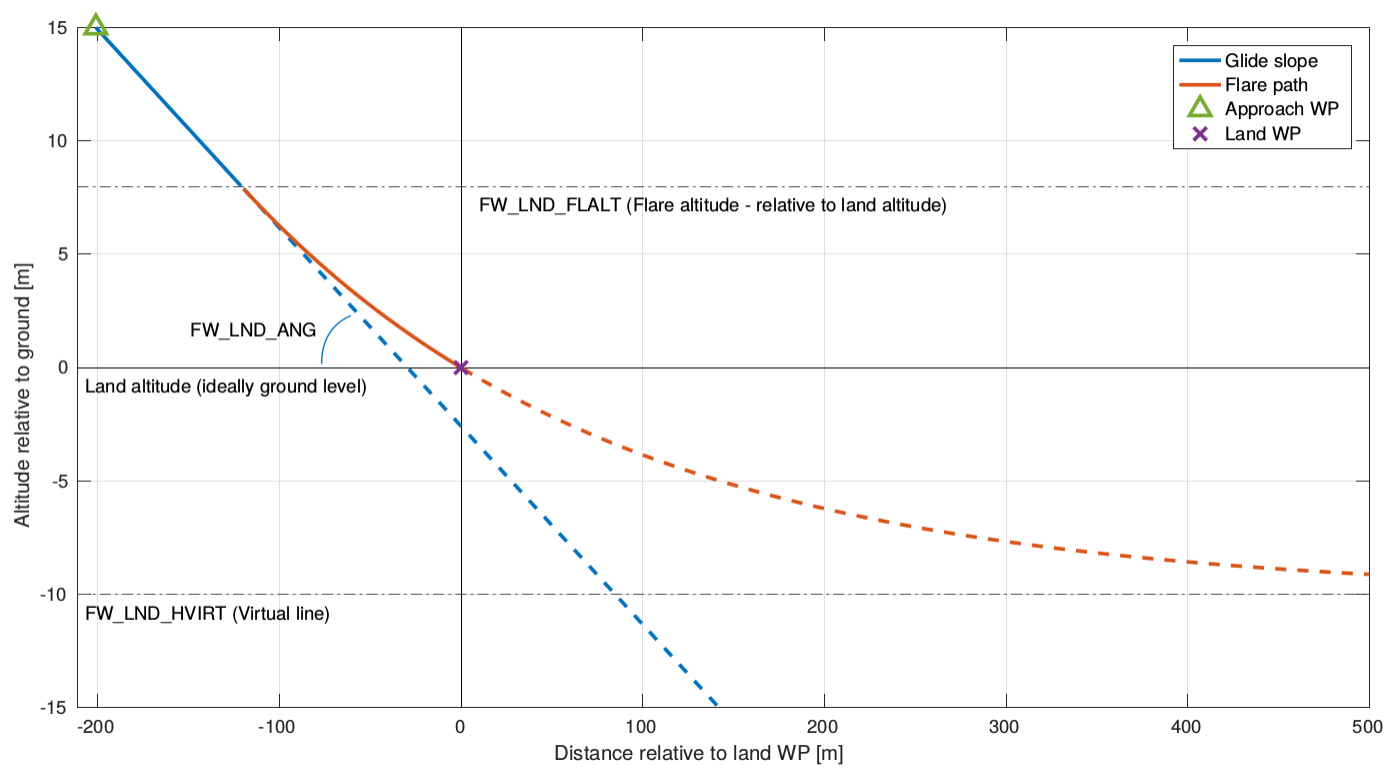
信号弹着陆高度是相对于飞行器认为的地面高度而言的。在 降落模式 由于不知道地面高度,飞行器将假定地面高度为 0 米(海平面)。通常情况下,地面高度会比海平面高出很多,因此飞行器会在第一阶段着陆(在到达照明弹高度之前着陆)。
在任务中 返回模式如果飞行器安装了测距传感器,则可以准确估计地面高度,着陆方式如上图所示。
着陆还会受到以下参数的影响:
| 参数 | 说明 |
|---|---|
| FW_LND_ANG | 点火前的着陆斜角 |
| FW_LND_HVIRT | 用于计算照明弹轨迹的虚拟水平线/高度。 这表示耀斑路径曲线渐近的次地面高度。 |
| FW_LND_FLALT | 着陆信号弹高度(相对于着陆高度) |
| FW_LND_TLALT | 着陆节流限制高度(相对着陆高度)。默认值为 -1.0 时,系统会默认在 2/3 的耀斑高度应用油门限制。 |
| FW_LND_HHDIST | 着陆航向保持水平距离 |
| FW_LND_USETER | 着陆时使用地形估计值(GPS 地面高度)。默认情况下这一功能是关闭的,通常使用航点或返回高度(或任意陆地位置的海平面)。 |
| FW_LND_FL_PMIN | 扩口时的最小俯仰角。正数表示机头向上。 FW_LND_TLALT 达到 |
| FW_LND_FL_PMAX | 扩口时的最大俯仰角。正数表示机头向上,一旦 FW_LND_TLALT 达到 |
| FW_LND_AIRSPD_SC | 着陆时的最小空速缩放系数。说明:将该系数与飞机的最小空速相乘,即可得出着陆时的目标空速。 FW_AIRSPD_MIN x FW_LND_AIRSPD_SC |