迷你 Pixhawk
该飞行控制器支持 PX4 试验性.
3DR®; Pixhawk®; 迷你型 自动驾驶仪是 Pixhawk(由 3DR 与 HobbyKing 合作设计)的下一代进化版。®;).它的大小约为原来 Pixhawk 的 1/3,拥有更强大的处理器和传感器。
Pixhawk Mini 基于 PX4 开放硬件项目,并针对 PX4 飞行算法池进行了优化。

可提供接线信息 低于.
规格
处理器
- 主处理器 STM32F427 Rev 3
- IO 处理器: STM32F103
传感器
- Accel/Gyro/Mag: MPU9250
- 弃用 由 PX4 固件提供
- Accel/Gyro: ICM20608
- 气压计 MS5611
额定电压
- 电源模块输出: 4.1~5.5V
- 最大输入电压 45 伏(10S 锂电池)
- 最大电流感应: 90A
- USB 电源输入: 4.1`5.5V
- 伺服导轨输入: 0~10V
接口:
- 1 x UART 串行端口(用于 GPS)
- Spektrum DSM/DSM2/DSM-X®;卫星兼容遥控输入
- Futaba S BUS®兼容遥控输入
- PPM 和信号 RC 输入
- I2C(用于数字传感器)
- CAN(用于使用兼容控制器进行数字电机控制)
- 模数转换器(用于模拟传感器)
- 微型 USB 端口
重量和尺寸
- 尺寸 38x43x12 毫米
- 重量 15.8g
GPS 模块(随套件提供):
- 全球导航卫星系统接收器: ublox®; Neo-M8N;指南针 HMC5983
- 重量 22.4g
- 尺寸 37x37x12 毫米
购买
连接器分配
<待添加>;
特点
Pixhawk Mini 的主要功能包括
- 运行 NuttX 实时操作系统的先进 32 位 ARM Cortex® M4 处理器
- 8 个 PWM/伺服输出
- 用于附加外设(UART、I2C、CAN)的多种连接选项
- 冗余电源输入和自动故障切换
- 内置安全开关和可选的外部安全按钮,方便启动电机
- 多色 LED 指示灯
- 集成式多音压电音频指示器
- 用于长时间高速记录的 microSD 卡
- 易于使用的微型 JST 连接器
Pixhawk Mini 随新的 GPS 模块:
- 基于 uBlox M8N
- 最多可同时接收 3 个全球导航卫星系统(GPS、伽利略、格罗纳斯、北斗)
- 业界领先的 –167 dBm 导航灵敏度
- 安全和完整性保护
- 支持所有卫星增强系统
- 先进的干扰和欺骗检测
- 满足性能和成本要求的产品变体
套件包
3DR 迷你 Pixhawk 装运时包含以下内容:
| 组件 | 图片 |
|---|---|
| Pixhawk 微型自动驾驶仪 |  |
| GPS 模块 |  |
| 四路配电板 |  |
| 8 通道 PWM 分线板 |  |
| 4 针电缆(用于 I2C) |  |
| 用于 PPM/SBUS 的 RC-in 电缆 |  |
| 6 至 6/4 ‘Y’适配器,用于 GPS 和其他 I2C 设备 |  |
| 6 针电缆(2)(用于配电板和指南针/GPS) |  |
| 6 针 JST 至 DF13,用于传统遥测无线电 |  |
| 安全开关 |  |
| 8 通道 PWM 分线电缆 | 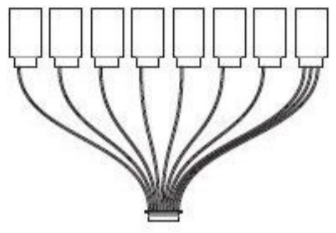 |
| 安装泡沫 |  |
| I2C 突破板?- 讲义上未列出部件 | - |
可选配件
遥测无线电装置:915 MHz(美国),433 MHz(欧洲)
安装 3DR 遥测无线电设备时,请使用 Pixhawk Mini 附带的连接器,而不是无线电设备自带的连接器。
3DR 10S 电源模块
- WiFi 遥测无线电
- 数字式空速传感器
兼容性
遥控无线电
- PPM 输出 RC 接收器
- Spektrum DSM 遥控接收器
- Futaba S BUS 遥控接收器
造血干细胞
- 所有标准 PWM 输入电子调速器
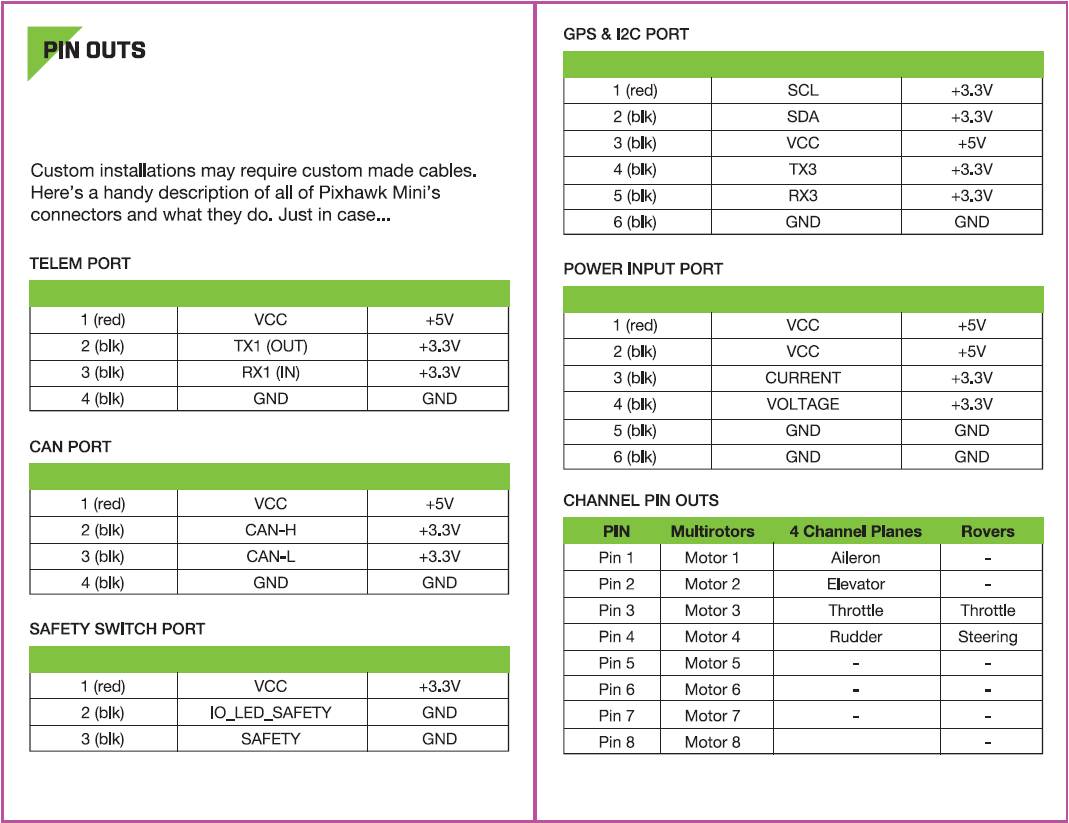
连接器引脚分配(引脚输出)
产品比较
Pixhawk Mini 与 Pixhawk(原版)对比
- 尺寸缩小三分之一--从 50x81.5x15.5mm 减小到 38x43x12mm。
- Rev 3 处理器,可充分利用 2MB 闪存。
- 改进了传感器,包括主 IMU MPU9250 和副 IMU ICM20608。从而实现了更稳定、更可靠的飞行和导航。
- 包括 GPS+ 指南针模块。配备支持 GLONASS 的 Neo M8N;指南针 HMC5983。期待更快、更强的 GPS 锁定。
- 微型 JST 连接器,而不是 DF-13。这些连接器更容易使用。
- 内置压电扬声器和安全开关。
- 附带的 PDB 可支持 4S 电池。
Pixhawk Mini 与 Pixfalcon
- 改进的传感器,包括主 IMU MPU9250 和副 IMU ICM20608。振动处理和可靠性有望得到改善。
- 支持 UAVCAN 的 CAN 接口。
- 包括 8 通道岔路伺服导轨,适用于需要供电 PWM 输出的飞机和其他载具。
- 包括 I2C 分线板,共有 5 个 I2C 连接。
- 类似尺寸。
Pixhawk Mini 采用意法半导体的先进处理器和传感器技术,以及 NuttX 实时操作系统,性能卓越、灵活可靠,可用于控制任何自动驾驶载具。
已知问题
- 一些 Pixhawk Minis 配备了 硬件缺陷 使内部 MPU9250 IMU 变得不可靠。
- 这个问题只出现在旧版本的硬件中,因为 制造商曾在某个时候修复过.
- 要检查特定电路板是否受影响,请先断开电路板连接一段时间,然后接通电源并尝试从 PX4 命令行启动 mpu9250 驱动程序。如果电路板受影响,驱动程序将无法启动。
- MPU9250 是 默认禁用 在 PX4 固件上。
- 如果没有外部磁力计或连接的 GPS,即使在室内,有缺陷的 Pixhawk Minis 也无法校准。
- 使用外置 GPS 时、 这不是问题 因为辅助 ICM20608 提供加速度计和陀螺仪,而外部 GPS 则提供磁力计。
布线快速入门
迷你 Pixhawk 已不再生产,3DR 也不再提供。
本快速入门指南介绍了如何为 迷你 Pixhawk 并连接其最重要的外设。
标准接线图
下图显示了标准 四旋翼 使用 Pixhawk Mini 套件 和 3DR 遥测无线电(以及电调、电机、电池和通过手机运行的地面控制站)。我们将在下面的章节中介绍每个主要部分。
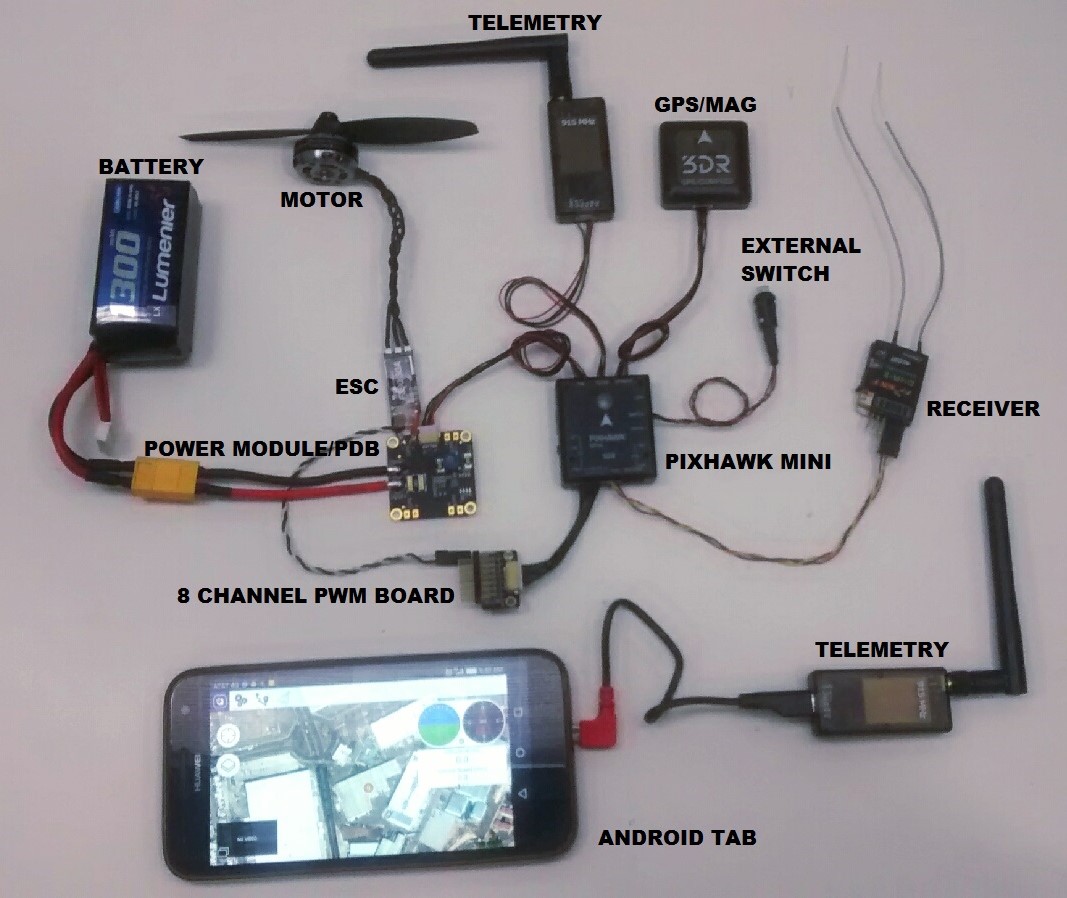
其他类型飞行器的输出接线/供电略有不同。下文将详细介绍 VTOL、Plane 和 Copter。
安装和定位控制器
迷你 Pixhawk 应使用减震泡沫垫(包含在套件中)安装在车架上。安装位置应尽可能靠近载具重心,箭头朝上,指向载具前部。
![]()
如果控制器无法按照推荐/默认方向安装(例如由于空间限制),则需要按照实际使用的方向配置自动驾驶仪软件: 飞行控制器定向.
GPS + 指南针
将 3DR GPS + Compass 连接到 Pixhawk Mini's GPS&I2C 使用随附的 6 针电缆将 GPS/ 指南针连接到端口(右上角)。GPS/Compass 应安装在车架上,尽可能远离其他电子设备,朝向载具前方(将 compass 与其他电子设备分开可减少干扰)。

注意 - 插入显示两个端口的图像?或 GPS&I2C 正面图片
首次使用前必须校准指南针: 罗盘校准
电源
下图显示的是典型的电源接线,当使用 迷你 Pixhawk 四旋翼飞行器。它使用 四路配电板 套件中的电池可为 Pixhawk Mini 和电调/电机供电(也可为其他配件供电)。
四路配电板 包括一个适用于 4S 电池的电源模块 (PM)。该模块 3DR 10S 电源模块 (如果您需要更强的动力,建议您使用"......"(已停产)。
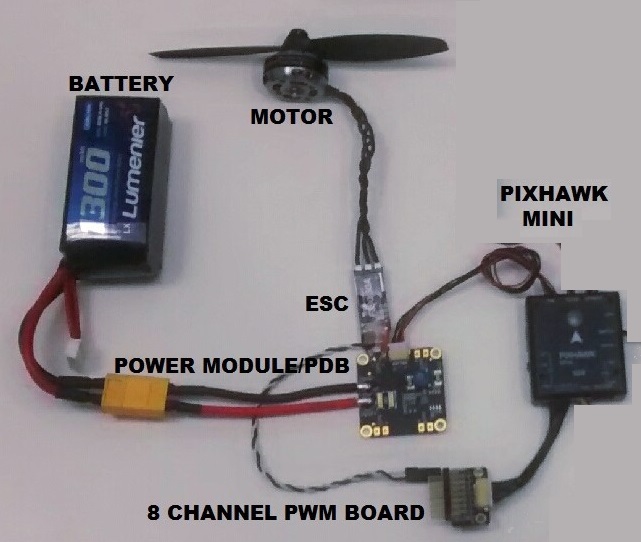
迷你 Pixhawk 通过 下午 端口。使用电源模块时(如本例),端口还将读取模拟电压和电流测量值。
配电板最多可为 4 个电调单独供电(但本例中只连接了一个)。
控制信号来自 MAIN OUT。在这种情况下,只有一个控制通道,它通过主输出连接到电调。 8 通道 PWM 分线板.
Pixhawk Mini 输出轨道 (MAIN OUT) 不能为连接的设备供电(在所示电路中也不需要)。如果 MAIN OUT 连接到需要供电的设备(如飞机上使用的伺服器),则需要使用 BEC(电池消除电路)为轨道供电。随附的辫子板允许一个通道为其他输出供电。
无线电遥控
Pixhawk Mini 支持多种不同型号的无线电接收器:
Spektrum 和 DSM 接收机连接到 SPKT/DSM 输入。

PPM-SUM 和 S.BUS 接收器连接到 RCIN 港口。

的 PPM 和 PWM 接收器。 每个通道单独布线 必须连接到 RCIN 港 通过 PPM 编码器 就像这个 (PPM-Sum 接收器的所有通道均使用一根信号线)。
有关选择无线电系统、接收机兼容性和绑定发射机/接收机对的更多信息,请参阅: 遥控发射器和接收器.
安全开关(可选)
控制器上有一个集成的安全开关,一旦自动驾驶仪准备好起飞,就可以用它来启动电机。如果该开关在特定飞行器上难以使用,您可以安装(可选)外部安全按钮,如下图所示。
遥测无线电
发动机
所有支持的空中和地面框架的 MAIN/AUX 输出端口与电机/伺服器之间的映射关系列于 机身参考.
各帧之间的映射并不一致(例如,您不能依赖油门在所有平面帧上的相同输出)。请确保为您的载具使用正确的映射。
如果参考资料中没有列出您的机架,请使用正确类型的通用机架。
备注
- 输出轨必须单独供电,这在 电源 上节。
- Pixhawk Mini 不能用于 QuadPlane VTOL 机身。这是因为 QuadPlane 需要 9 个输出(4 个主输出、5 个辅助输出),而 Pixhawk Mini 只有 8 个输出(8 个主输出)。

其他外设
其他组件的布线和配置在各主题中都有涉及。 外设.
配置
一般配置信息见 自动驾驶仪配置.
这里将介绍 QuadPlane 的具体配置: 四翼 VTOL 配置
构建固件
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v2_default
调试端口
这块电路板没有调试端口(即没有用于访问 系统控制台 或 SWD (JTAG) 硬件调试接口.
开发人员需要将导线焊接到电路板上的 SWD 测试焊盘以及 STM32F4 (IC) TX 和 RX 上,以获得控制台。