mRo-X2.1 自动驾驶仪
mRo-X2.1 自动驾驶仪 是基于 Pixhawk®;-项目 FMUv2 开放式硬件设计它在 NuttX 操作系统
该飞行控制器 支持的制造商.
快速总结
- 主片上系统: STM32F427
- CPU:STM32F427VIT6 ARM®; 微控制器 - 修订版 3
- IO: STM32F100C8T6 ARM®; 微控制器
- 传感器
- Invensense®; MPU9250 9DOF
- Invensense ICM-20602 6DOF
- MEAS MS5611 气压计
- 尺寸/重量
- 尺寸:36 毫米 x 50 毫米(可订购安装垂直、水平或未安装封头的产品)
- 安装点:30.5 毫米 x 30.5 毫米 3.2 毫米直径
- 重量:10.9 克
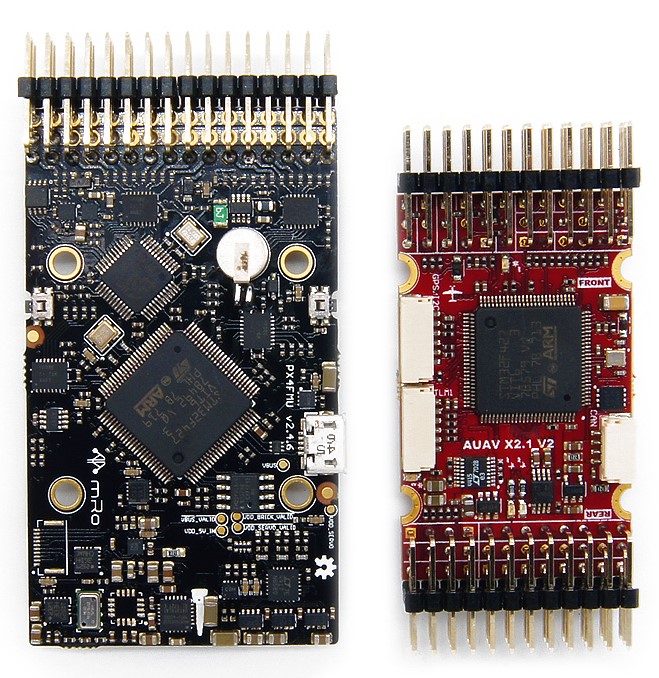
下图是与 Pixhawk 1 的并排对比图。mRo 具有几乎相同的硬件和连接功能,但占地面积要小得多。主要区别在于更新的传感器和 Rev 3 FMU。
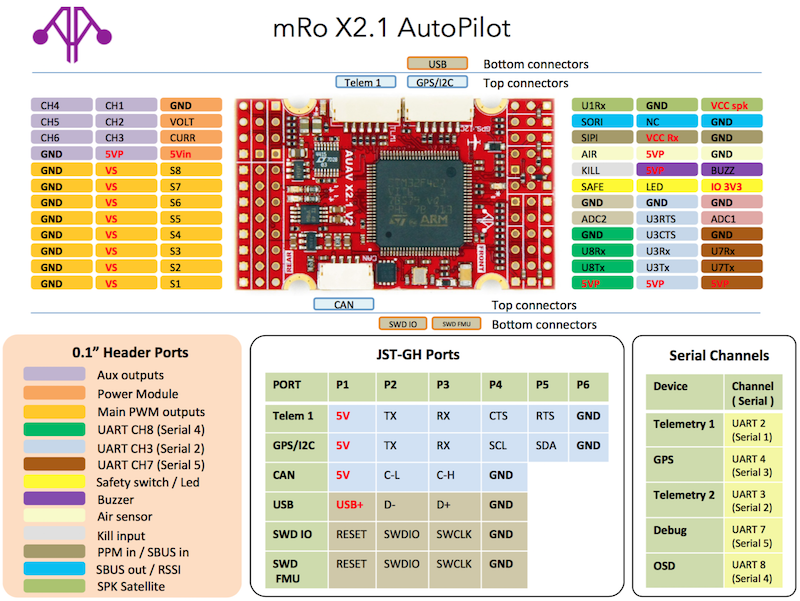
连接性
- 2.54 毫米接头:
- 带 I2C 的 GPS(UART4)
- CAN 总线
- RC 输入
- PPM 输入
- Spektrum 输入
- RSSI 输入
- sBus 输入
- sBus 输出
- 电源输入
- 蜂鸣器输出
- LED 输出
- 8 x 伺服输出
- 6 x 辅助输出
- 板载微型 USB 接口
- 击杀引脚输出 (目前固件不支持)
- 空速传感器
- USART2(Telem 1)
- USART3(Telem 2)
- UART7(控制台)
- UART8(OSD)
PX4 引导加载器问题
默认情况下,mRo X2.1 可能已为 ArduPilot 进行了预配置®; 而不是 PX4。这在固件更新时可以看到,电路板被识别为 FMUv2 而不是 X2.1。
在这种情况下,您必须使用 BL_Update_X21.zip.如果不进行校正,罗盘方向就会出错,而且无法检测到辅助 IMU。
更新步骤如下
- 下载并解压缩 BL_Update_X21.zip.
- 查找文件夹 BL_Update_X21.其中包含一个 箱柜 文件和一个名为 /etc 包含一个 rc.txt 文件
- 将这些文件复制到 micro SD 卡根目录,然后插入 mRO x2.1
- 启动 mRO x2.1 等待开机,然后重启 1 次。
可用性
该产品可在 移动机器人®; 商店.
接线指南
构建固件
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
使 mro_x21_default
示意图
mRo 硬件 repo 上有该电路板的文档: x21_V2_schematic.pdf.
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | IO 调试 |
| USART2 | /dev/ttyS1 | 序号1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS/I2C |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | 串行5 控制台 |
| UART8 | /dev/ttyS6 | 序号4 |