基本概念
本主题提供了无人机和 PX4 使用的基本介绍(主要面向新手用户,但对有经验的用户也是很好的入门读物)。
如果您已经熟悉了基本概念,就可以继续学习 基本装配 了解如何为特定自动驾驶仪硬件布线。要加载固件并设置载具,请使用 QGroundControl见 基本配置.
什么是无人机?
无人机是一种可遥控或自主控制的无人驾驶机器人。
无人机可用于多种用途 消费、工业、政府和军事应用.其中包括(并非详尽无遗):航拍/摄像、运载货物、竞赛、搜索和测量等。
在空中、地面、海上和水下有不同类型的无人机。这些无人机(更正式地)被称为无人机(UAV)、无人机系统(UAS)、无人地面飞行器(UGV)、无人水面飞行器(USV)和无人水下飞行器(UUV)。
无人机的 "大脑 "被称为自动驾驶仪。它包括 飞行算法池 上运行的软件 载具控制器 (飞行控制器)硬件。
PX4 自动驾驶仪
PX4 是功能强大的开源自动驾驶仪 飞行算法池.
PX4 的一些主要功能包括
- 控制装置 多种不同的车架/类型包括:飞机(多旋翼飞机、固定翼飞机和 VTOL)、地面载具和水下载具。
- 硬件的最佳选择 载具控制器传感器和其他外围设备。
- 灵活而强大 飞行模式 和 安全功能.
PX4 是更广泛的无人机平台的核心部分,该平台包括 QGroundControl 地面站、 Pixhawk 硬件和 MAVSDK PX4 可与配套电脑、相机和其他使用 MAVLink 协议的硬件集成。PX4 由 Dronecode 项目.
QGroundControl
Dronecode 地面控制站名为 QGroundControl.您可以使用 QGroundControl 将 PX4 载入(闪存)到 载具控制硬件此外,您还可以设置飞行器、更改不同参数、获取实时飞行信息,以及创建和执行完全自主的任务。
QGroundControl 可在 Windows、Android、MacOS 或 Linux 上运行。从以下地址下载并安装 这里.
载具/飞行控制器电路板
PX4 最初设计用于在以下设备上运行 Pixhawk 系列 但现在可以在 Linux 计算机和其他硬件上运行。您应该根据载具的实际限制、您希望进行的活动以及成本来选择电路板。
欲了解更多信息,请参阅 选择飞行控制器.
传感器
PX4 利用传感器确定载具状态(稳定和实现自主控制所需的传感器)。系统 最低要求 陀螺仪、加速计、磁力计(罗盘)和气压计。需要 GPS 或其他定位系统来实现所有自动导航功能。 模式以及一些辅助模式。固定翼和 VTOL 飞行器还应包括一个空速传感器(强烈推荐)。
欲了解更多信息,请参阅
输出:电机、伺服、执行器
PX4 的用途 产出 来控制:电机速度(例如通过 ESC)、副翼和襟翼等飞行表面、相机触发器、降落伞、夹具以及许多其他类型的有效载荷。
例如,下面的图片显示了以下 PWM 输出端口 Pixhawk 4 和 Pixhawk 4 mini.
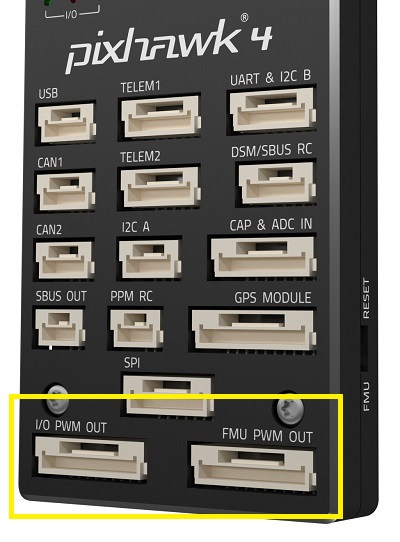

输出分为 MAIN 和 辅助 输出,并单独编号(即 MAINn 和 AUXn其中 n 为 1 到通常的 6 或 8)。
每种输出的具体用途都是按机型硬编码的。所有机型的输出映射在 机身参考.
飞行控制器可能只有
MAIN输出(如 Pixhawk 4 Mini),或者可能只有 6 个输出,要么是MAIN或辅助.确保您选择的控制器有足够的正确类型的端口/输出,以满足您的需要。 机身.
通常情况下 MAIN 端口用于核心飞行控制,而 辅助 用于非关键执行器/有效载荷(尽管 辅助 如果没有足够的设备,可将其用于飞行控制。 MAIN 例如 VTOL)。例如 通用四旋翼飞行器 的 MAIN 输出端 1-4 用于相应的电机,其余的 MAIN 和一些 辅助 输出用于 RC 穿通。
上输出所使用的实际端口/总线。 飞行控制器 取决于硬件和 PX4 配置。
通常 如上图所示,这些端口映射到 PWM 输出,通常是屏幕打印出来的 主输出 和 辅助输出.
它们也可能被标记为 FMU PWM 输出 或 IO PWM 输出 (或类似)。Pixhawk 控制器有一块主 FMU 板和一块 FMU 板。 可以 有单独的 IO 板。如果有 IO 板,则 辅助 端口直接连接到 FMU 和 MAIN 端口连接到 IO 板。否则 MAIN 端口连接到 FMU,并且没有 辅助 端口。FMU 输出端口可以使用 Dshot 或 单发 这些协议(以及 PWM)可提供更低的延迟性能。这对于需要更高性能的竞赛和其他飞行器来说非常有用。
输出端口也可映射到 UAVCAN 节点(如 UAVCAN 电机控制器).在这种情况下,输出到节点的(相同)机身映射被使用。
备注
- 只有 6-8 个输出
MAIN和辅助因为大多数飞行控制器只有这么多 PWM/Dshot/Oneshot 输出。理论上,如果总线支持,还可以有更多的输出(例如,UAVCAN 总线并不局限于这么几个节点)。
电调和电机
许多 PX4 无人机使用由飞行控制器通过电子调速器(ESC)驱动的无刷电机(ESC 将飞行控制器发出的信号转换成适当的功率水平输送给电机)。
有关 PX4 支持哪些电调/电机的信息,请参阅:
电池/电源
PX4 无人机通常使用锂聚合物(LiPo)电池供电。电池通常使用一个 电源模块 或 电源管理板它们为飞行控制器和电调(电机)提供单独的电源。
有关电池和电池配置的信息,请参阅 电池配置 和 基本装配 例如 Pixhawk 4 接线快速入门 > 电源).
无线电遥控 (RC)
A 无线电遥控 (RC) 系统用于 人工 控制载具。它由一个遥控装置组成,遥控装置使用发射器将摇杆/控制杆位置与载具上的接收器进行通信。有些遥控系统还能从自动驾驶仪接收遥测信息。
PX4 的自主飞行模式不需要遥控系统。

遥控系统选择 介绍了如何选择遥控系统。其他相关主题包括
- 无线电/遥控设置 - 中的远程控制配置 QGroundControl.
- 飞行 101 - 学习如何使用遥控器飞行
- FrSky 遥测技术 - 设置遥控发射机以接收 PX4 的遥测/状态更新。
GCS 操纵杆控制器
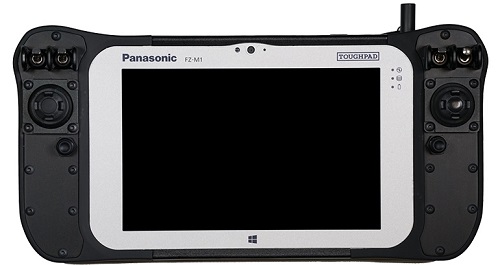
A 电脑操纵杆 相通 QGroundControl 也可用于手动控制 PX4(QGC 将操纵杆动作转换为通过遥测链路发送的 MAVLink 信息)。集成了地面控制站的地面控制装置也可使用这种方法,例如 UAVComponents 微型导航仪 如下图所示。操纵杆也常用于驾驶模拟飞行器。
安全开关
载具通常有一个 安全开关 载具在行驶前必须启动 上膛 (上膛时,电机有电,螺旋桨可以转动)。安全开关通常集成在 GPS 设备中,但也可能是一个单独的物理组件。
上膛载具具有潜在危险。安全开关是防止意外启动的附加装置。
数据/遥测无线电
数据/遥测无线电 可在地面控制站之间提供无线 MAVLink 连接,如 QGroundControl 和运行 PX4 的飞行器。这样就可以在飞行器飞行时调整参数、实时检查遥测数据、临时更改任务等。
机载/辅助计算机
PX4 可通过串行电缆或 Wifi 由独立的车载配套计算机控制。配套电脑通常使用 MAVSDK 或 MAVROS 等 MAVLink API 进行通信。
使用机器人应用程序接口需要软件开发技能,不在本指南范围之内。
SD 卡(可移动存储器)
PX4 使用 SD 存储卡存储 飞行日志还需要它们才能使用 UAVCAN 外围设备和飞行 任务.
默认情况下,如果没有 SD 卡,PX4 将播放 格式化失败(2 声) 在启动过程中调整两次(将无法使用上述任何功能)。
Pixhawk 板支持的 SD 卡最大容量为 32GB。最大 闪迪至尊 U3 32GB 是 强烈推荐 (开发人员指南)。
SD 卡绝对是可选项。不包括 SD 卡插槽的飞行控制器可以:
- 通过参数 CBRK_BUZZER.
- 溪流日志 到另一个组件(同伴)。
- 在 RAM/FLASH 中存储任务。
上膛和撤膛
载具可能有活动部件,其中一些部件在通电时有潜在危险(特别是电机和螺旋桨)!
减少事故发生的机会:
- PX4 载具有 撤膛 (在不使用时(无电源),必须明示 上膛 然后才起飞。
- 有些载具还需要 安全开关 在上膛成功之前,必须先脱离。
- 如果载具未处于健康状态,则无法启动。
- 在着陆后或驾驶仪没有迅速起飞时,载具通常也会恢复到解除警报状态。
默认情况下(模式 2 发射机),按住遥控装置上的油门/偏航杆即可触发上膛。 右下 一秒钟(要解除上膛,请按住左下方的摇杆)。还可以使用遥控器上的遥控按钮对 PX4 进行上膛配置(可从地面站发送上膛命令)。
有关上膛和撤膛配置的详细介绍,请点击此处: 预上膛、上膛、撤膛配置.
飞行模式
飞行模式可为用户(驾驶仪)提供不同类型/级别的载具自动化和自动驾驶辅助。 自主模式 完全由自动驾驶仪控制,无需驾驶仪/遥控器输入。例如,这些模式用于自动执行起飞、返回原点和着陆等常见任务。其他自主模式可执行预先编程的任务、跟踪 GPS 信标或接受机载计算机或地面站的指令。
手动模式 用户(通过遥控杆/操纵杆)在自动驾驶仪的辅助下进行控制。不同的手动模式可实现不同的飞行特性--例如,有些模式可实现杂技表演,而有些模式则无法翻转,并能逆风保持位置/航向。
并非所有飞行模式都适用于所有类型的飞行器,有些模式只有在满足特定条件时才能使用(例如,许多模式需要全局位置估计)。
可用飞行模式概览 可以在这里找到.有关如何设置遥控器开关以打开不同飞行模式的说明,请参阅《飞行模式》。 飞行模式配置.
安全设置(故障安全)
PX4 具有可配置的故障安全系统,可在出现故障时保护和恢复飞行器!这些系统允许您指定可以安全飞行的区域和条件,以及触发故障安全时将执行的操作(例如着陆、保持位置或返回指定点)。
您只能为 第一次 故障安全事件。一旦发生故障安全事件,系统将输入特殊的处理代码,以便后续的故障安全触发由单独的系统级代码和载具专用代码进行管理。
主要故障安全区域如下:
- 电池电量不足
- 遥控 (RC) 损失
- 位置丢失(全局位置估计质量太低)。
- 机外损失(例如与配套计算机失去连接)
- 数据链路丢失(例如,与全球监控系统的遥测连接丢失)。
- 突破地理围栏(限制载具在虚拟圆柱体内飞行)。
- 任务故障保护(防止在新的起飞地点执行之前的任务)。
- 交通规避(由 ADSB 等应答器数据触发)。
欲了解更多信息,请参阅 安全 (基本配置)。
标题和方向
所有载具、船只和飞机都有一个航向,或根据其前进运动确定一个方向。
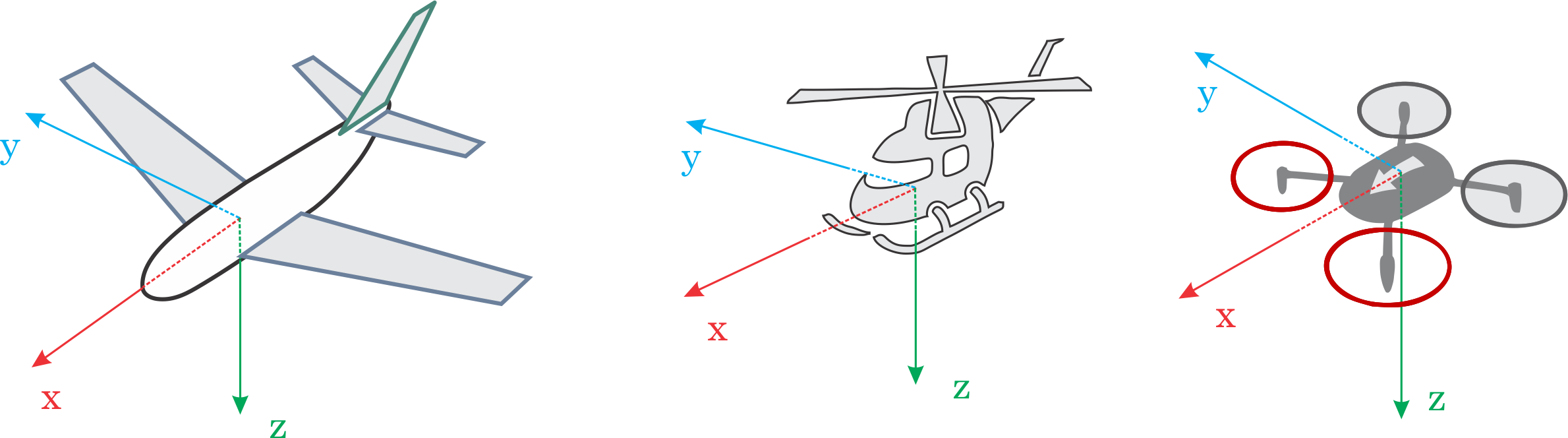
必须知道飞行器的航向,以便使自动驾驶仪与飞行器的运动矢量保持一致。多旋翼飞行器即使四面对称也有航向!通常,制造商会使用彩色道具或彩色臂来指示航向。
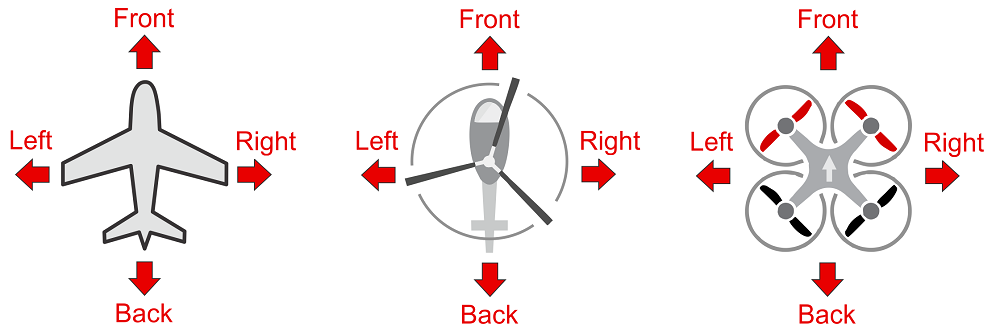
在插图中,我们将用红色来表示多旋翼飞行器前螺旋桨的航向。
您可以在 飞行控制器定向