卡库特 F7
卡库特 F7 来自 Holybro 的飞行控制器板是专为竞赛手设计的。

该飞行控制器 支持的制造商.
主要功能
- 主片上系统: STM32F745VGT6
- 中央处理器:216 MHz ARM Cortex M7,带单精度 FPU
- 内存:320 kb Sram
- 闪存: 1 MB
- 标准竞赛外形尺寸:36x36 毫米,标准孔型为 30.5 毫米
- ICM20689 加速/陀螺仪(软安装)
- BMP280 巴罗
- 微型存储卡(用于记录)
- 6 个 UART
- 1 I2C 总线
- 6 个 PWM 输出
- 内置 OSD 芯片(通过 SPI 接口连接 AB7456)
购买地点
该电路板可在以下商店购买(例如):
卡库特 F7 旨在与 Tekko32 四合一电子调速器,可组合购买。
连接器和插针
这是 卡库特 F7显示黑板的顶部:
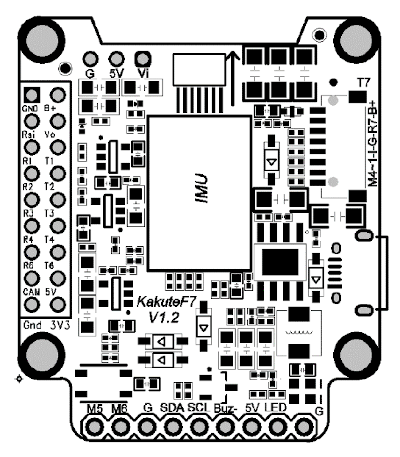
| 针脚 | 功能 | PX4 默认 |
|---|---|---|
| B+ | 电池正极电压(2S-6S) | |
| 5V | 5V 输出(最大 2A) | |
| VO | 视频输出到视频发射器 | |
| VI | 来自 FPV 摄像机的视频输入 | |
| G 或 GND | 地面 | |
| SDA、SCL | I2C 连接(用于外设) | |
| R1、T1 | UART1 RX 和 TX | TELEM1 |
| R2、T2 | UART2 RX 和 TX | TELEM2 |
| R3、T3 | UART3 RX 和 TX | NuttX 调试控制台 |
| R4、T4 | UART4 RX 和 TX | GPS1 |
| R6、T6 | UART6 RX 和 TX | RC 端口 |
| R7、T7 | UART7 RX 和 TX(RX 位于插头中,与 4 合 1 ESC 一起使用) | DShot 遥测技术 |
| 发光二极管 | WS2182 可寻址 LED 信号线(未测试) | |
| 布兹 | 压电蜂鸣器负极(将蜂鸣器正极连接至 5V 焊盘) | |
| 3V3 | 3.3V 输出(最大 200 mA) | |
| M1 至 M4 | 电机信号输出(位于 4 合 1 ESC 中使用的插头中) | |
| M5、M6 | 附加电机信号输出(位于电路板侧面) | |
| RSI | 接收器输入的模拟 RSSI(0-3.3V) | |
| 靴子 | 启动器按钮 |
PX4 引导加载程序更新
电路板预装了 Betaflight.在安装 PX4 固件之前,必须确保 PX4 引导加载程序 必须刷新。下载 kakutef7_bl.hex 二进制引导程序并读取 本页 以获取闪光说明。
构建固件
至 建造 PX4 为这一目标:
制作 holybro_kakutef7_default
安装 PX4 固件
固件可通过任何常规方式安装:
- 构建并上传源代码
使 holybro_kakutef7_default 上传 - 加载固件 使用 QGroundControl.您可以使用预置固件或自己定制的固件。
配置
除了 基本配置以下参数非常重要:
| 参数 | 设置 |
|---|---|
| SYS_HAS_MAG | 由于电路板没有内置磁盘,因此应禁用此功能。如果安装了外置磁盘,则可以启用。 |
| 订购 | 如果您使用的是带有 Betaflight/Cleanflight 电机分配的四合一电调,则可相应设置该参数。 |
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART2 | /dev/ttyS1 | TELEM2 |
| USART3 | /dev/ttyS2 | 调试控制台 |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | 电调遥测(DShot) |
调试端口
系统控制台
UART3 RX 和 TX 配置为用作 系统控制台.
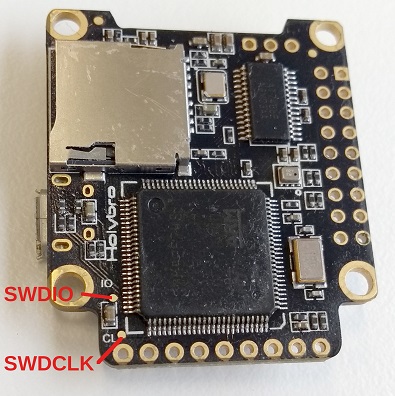
SWD
SWD 接口 (JTAG) 引脚是
SWCLK:测试点 2(CPU 上的引脚 72)SWDIO:测试点 3(CPU 上的引脚 76)接地:如船上标示VDD_3V3:如船上标示
具体如下。