PX4 飞行模式概述
飞行模式定义了自动驾驶仪如何响应远程控制输入,以及在完全自主飞行期间如何管理载具运动。
这些模式为用户(驾驶仪)提供不同类型/级别的自动驾驶辅助,从起飞和着陆等常见任务的自动化,到更容易恢复平飞、将飞行器保持在固定路径或位置等机制。
本主题概述了可用的飞行模式,以及这些模式在多旋翼飞行器 (MC)、固定翼飞行器 (FW) 和 VTOL 机架中默认行为的差异(主要是细微差别)。
有关特定飞行模式的更多详细信息,请参阅 飞行 > 飞行模式.
模式之间的切换
驾驶仪可通过遥控器上的开关或地面控制站在不同飞行模式之间转换(见第 6 节)。 飞行模式配置).
并非所有飞行模式都适用于所有载具类型,有些模式在不同载具类型上的表现也不尽相同。
有些飞行模式只有在特定的飞行前和飞行中条件下才有效(例如 GPS 锁定、空速传感器、沿轴的飞行器姿态感应)。在满足适当条件之前,PX4 不允许过渡到这些模式。
最后,在 自主模式 遥控杆移动将 默认情况下 改为 位置模式 作为多旋翼飞行时(除非处理关键的电池故障保护)。固定翼飞行时将忽略操纵杆的移动。
自主和手动模式
一般来说,飞行模式有以下两种 手册 或 自主.手动模式是指用户通过遥控控制杆(或操纵杆)控制飞行器移动的模式,而 自主 模式完全由自动驾驶仪控制,而 要求 无先导/遥控输入。
某些手动模式可能具有自动驾驶辅助机制,以便更容易获得或恢复受控飞行。例如,当遥控杆对中时,大多数模式都会拉平飞行器。
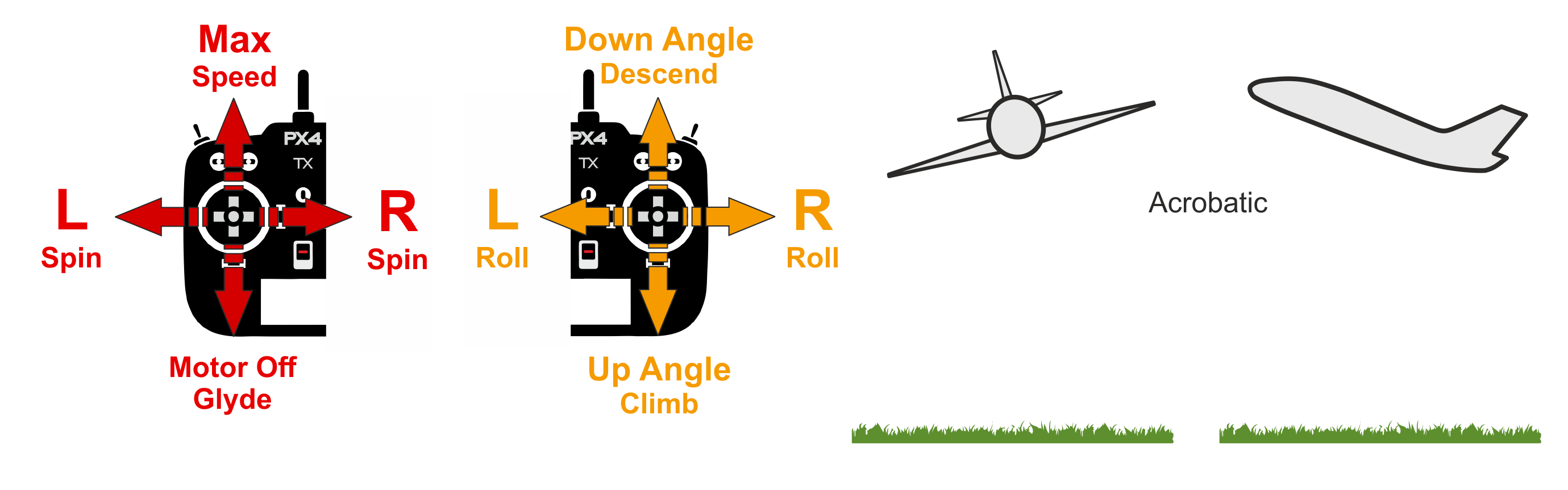
手动模式可进一步分为简单模式和杂技模式。在简单模式下,滚动杆和俯仰杆设定载具角度,从而实现左右和前后移动 在水平面内 (分别)。这不仅使运动具有可预测性,而且由于角度受到控制,载具不可能翻转。在杂技模式中,遥控摇杆控制角度旋转速度(绕各自轴线)。载具可以翻转,虽然机动性更高,但更难飞行。
固定翼
多旋翼飞行器:
钥匙
本文件使用了以下图标:
| 图标 | 说明 |
|---|---|
 |
手动模式。需要遥控器。 |
 |
自动模式。除更改模式外,RC 控制默认为禁用。 |
") |
需要定位(如 GPS、VIO 或其他定位系统)。 |
| 所需海拔高度(如气压计、测距仪)。 | |
 ; ; ; ; |
飞行模式难度(从简单到困难) |
多旋翼飞行器
位置模式
; ;
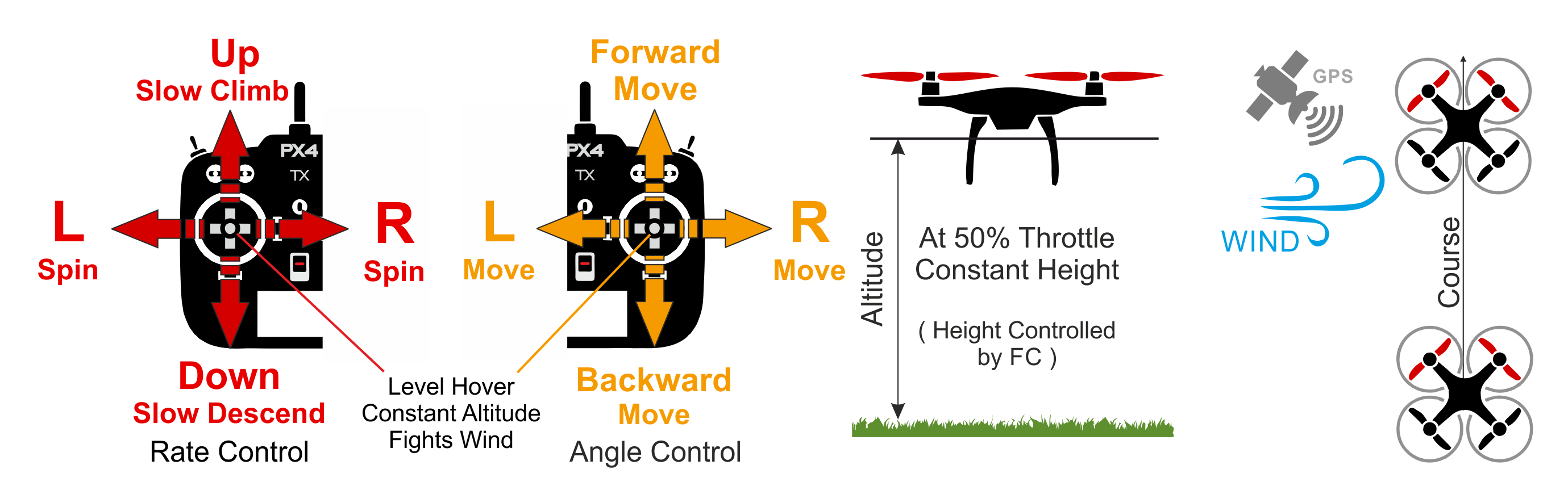
位置模式 是一种易于飞行的遥控模式,其中滚动杆和俯仰杆控制左右和前后方向(相对于飞行器前方)的飞行速度,油门控制上升和下降速度。释放/对中摇杆时,飞行器将主动制动、调平并锁定在三轴空间中的某个位置上,并对风力和其他力量进行补偿。
对于新手来说,定位模式是最安全的手动模式。与 海拔高度 和 手动/稳定 在这种模式下,当摇杆居中时,载具就会停止,而不会继续行驶,直到受到风阻而减速。
高度模式
; ;![]()
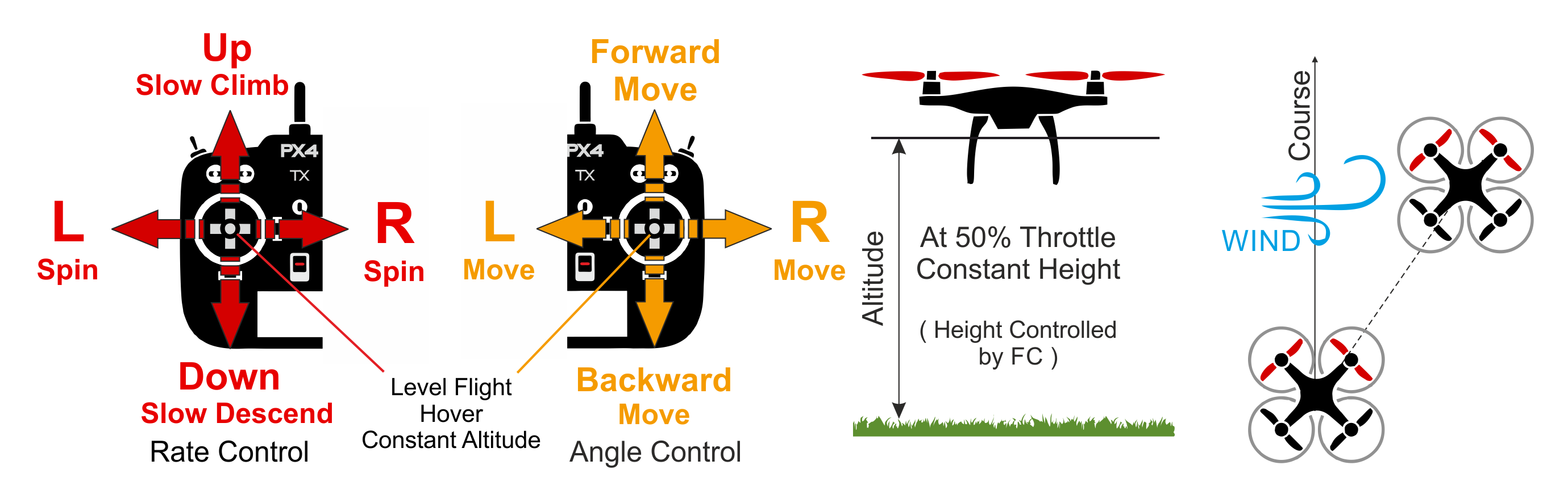
高度模式 是一个 比较 这是一种易于飞行的遥控模式,其中滚动杆和俯仰杆控制飞行器在左右和前后方向(相对于飞行器的前方)的移动,偏航杆控制在水平面上的旋转速度,油门控制上升和下降的速度。
当摇杆松开/对中时,载具将调平并保持当前位置。 高度.如果在水平面内运动,飞行器将继续飞行,直到任何动量被风阻消散为止。如果有风吹过,飞行器将顺着风的方向漂移。
姿态模式 是对新手来说最安全的非 GPS 手动模式。它就像 手动/稳定 模式,但在释放摇杆时还能稳定飞行高度。
手动/稳定模式
; ;
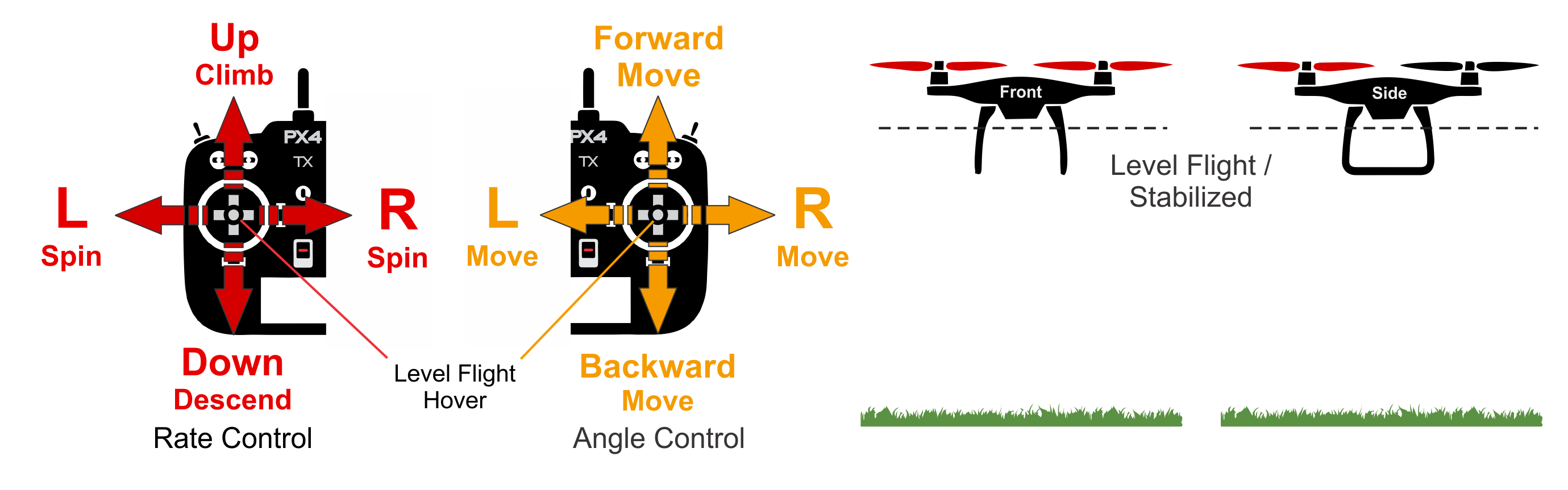
手动/稳定 当遥控杆位于中心位置时,该模式可稳定多旋翼飞行器。若要手动移动/驾驶飞行器,则需将控制杆移至中心以外的位置。
如果设置了以下任一选项,多旋翼模式就会启用 手册 或 稳定 多旋翼 载具的模式。
手动控制时,滚转杆和俯仰杆控制飞行器的角度(姿态),偏航杆控制水平面以上的旋转速度,油门控制高度/速度。
一旦松开控制杆,它们就会回到中心死区。一旦滚动杆和俯仰杆对中,多旋翼飞行器就会平移并停止。然后,飞行器将在原地悬停/保持高度--前提是平衡正确、油门设置适当且无外力作用(如风)。飞行器将随风漂移,您必须控制油门以保持高度。
态度
; ;
姿态模式 允许驾驶仪使用 手动/稳定 大部分时间都在飞行,但仍能 Acro 模式-在需要时,还可以进行翻转和花样翻新。
载具的行为如 手动/稳定模式 当滚动/俯仰摇杆在中央区域内移动时,就像 Acro 模式 当摇杆在外围移动时(默认情况下手动/稳定模式占据约 80% 的范围)。当摇杆居中时,多旋翼飞行器将保持水平(但仍会顺着风向和原有的动力漂移)。
Acro 模式
; ;
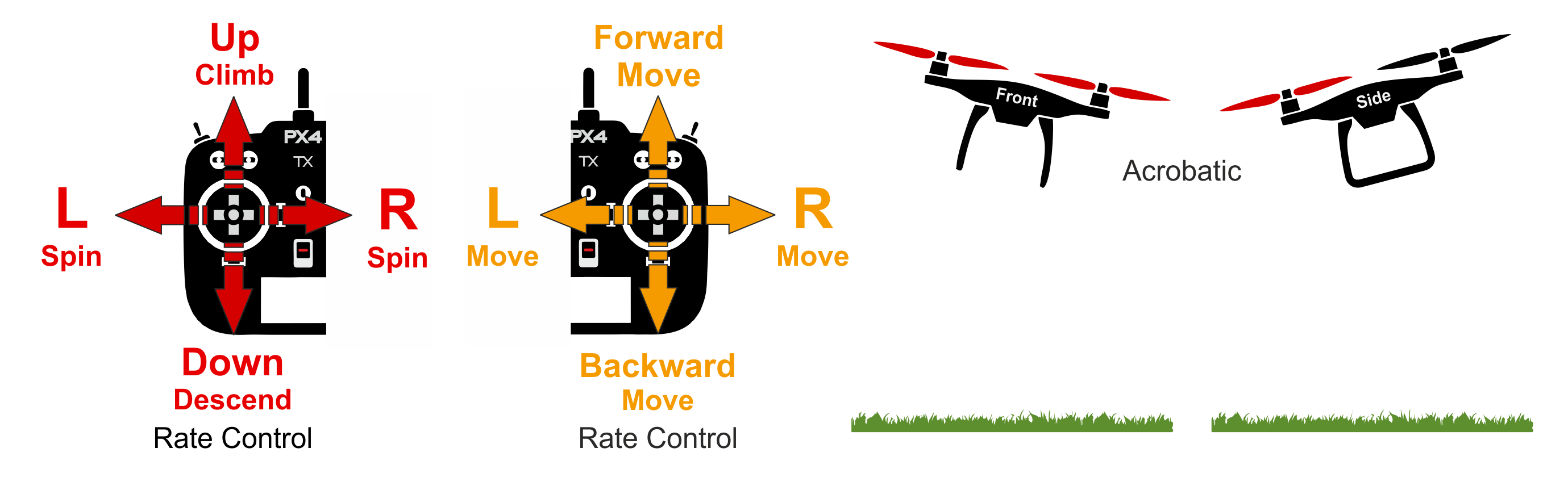
Acro 模式 是用于执行翻滚和绕圈等杂技动作的遥控模式。
滚动杆、俯仰杆和偏航杆控制围绕各自轴线的角度旋转速度,油门直接传递到输出混合器。当摇杆居中时,飞行器将停止旋转,但仍保持当前方向(侧向、倒置或其他),并根据当前动量移动。
轨道模式
;
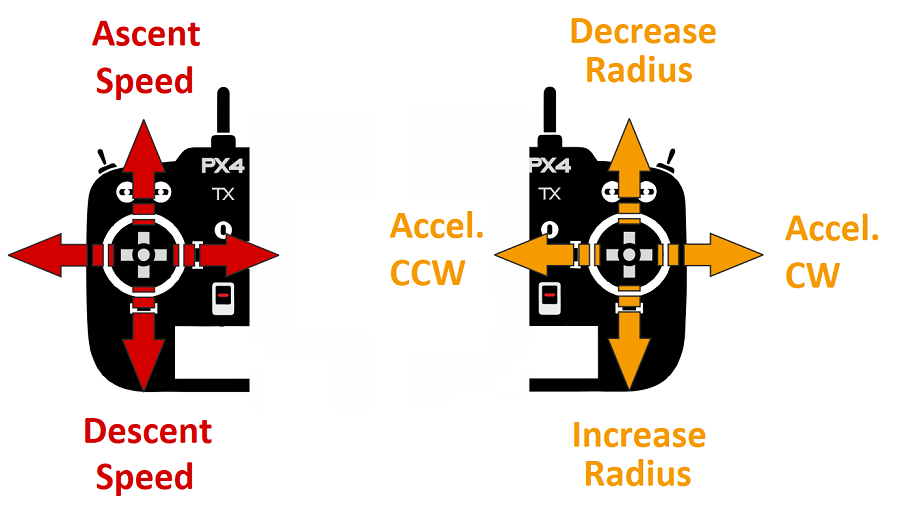
轨道模式 允许您指挥多旋翼飞行器(或多旋翼飞行器模式下的 VTOL)绕圈飞行,并偏航,使其始终朝向中心。
全球监控系统是 所需 来启用该模式,并设置轨道的中心位置和初始半径。默认情况下,飞行器将围绕中心位置(1 米/秒)以顺时针方向缓慢运行。遥控是可选项,可用于改变轨道高度、半径、速度和方向。
保持模式
;
保持模式 使多旋翼飞行器停止并悬停在当前位置和高度(顶着风和其他力量保持位置)。该模式可用于暂停任务或在紧急情况下帮助重新控制飞行器。该模式可以通过预编程的遥控开关或 QGroundControl 暂停 按钮。
返回模式
;
返回模式 使飞行器飞出一条通往安全地点的清晰路径。该模式可手动激活(通过预编程的遥控开关)或自动激活(例如,在发生以下情况时 故障安全 被触发)。
返回行为取决于参数设置,并可能遵循任务路径和/或任务降落模式(如果已定义)。默认情况下,多旋翼飞行器只需上升到安全高度,飞到原点,然后降落。
任务模式
;
任务模式 使载具执行预定义的自主 使命 (飞行计划)上传到飞行控制器。任务通常由地面控制站(GCS)应用程序创建和上传。
PX4 通用控制系统被称为 QGroundControl. QGroundControl 是我们用于 配置 PX4.
起飞模式
;
起飞 模式会使多旋翼飞行器垂直爬升到起飞高度,并在原地盘旋。
降落模式
;
降落模式 会使多旋翼飞行器在启用该模式的位置降落。
跟随模式
;
跟随我 "模式 可使多旋翼飞行器自主跟踪提供当前位置设置点的用户。位置设定点可能来自运行以下功能的安卓手机/平板电脑 QGroundControl 或来自 MAVSDK 应用程序。
离机模式
;
机外模式 使多旋翼飞行器服从通过 MAVLink 提供的位置、速度或姿态设定点。
该模式适用于配套计算机和地面站!
固定翼飞机
位置模式
; ;
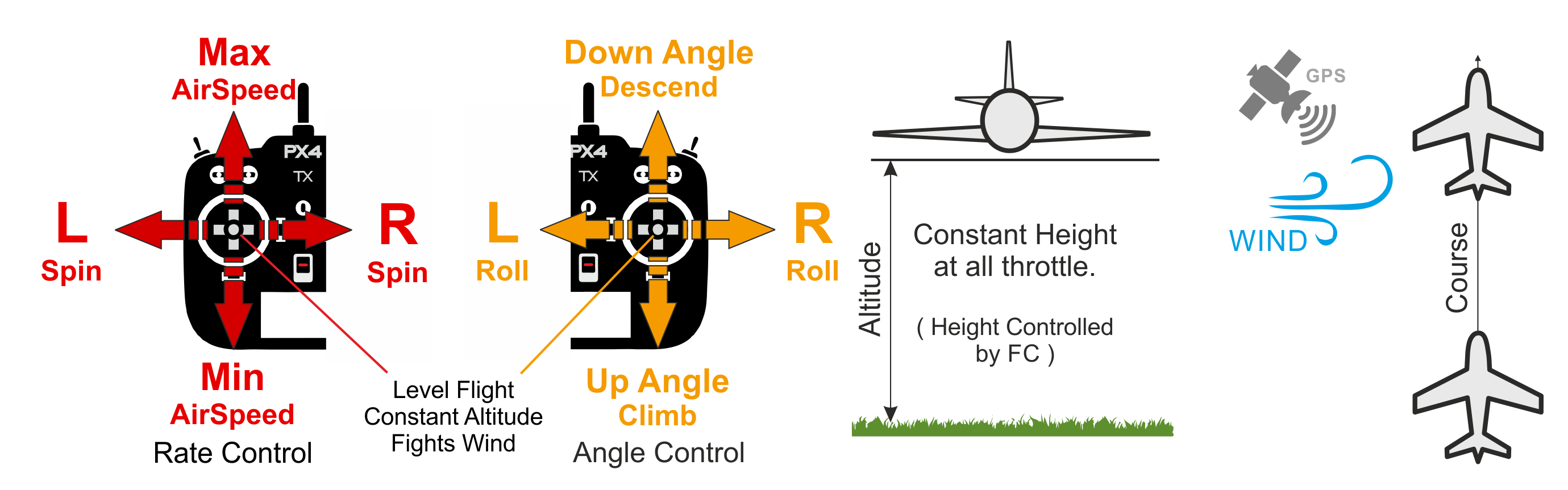
位置模式 是一种易于飞行的遥控模式,在这种模式下,松开摇杆/将摇杆对准中心,飞行器就会调平,并沿着当前方向的地面轨迹直线飞行—;补偿风力和其他力量。
油门决定空速(油门为 50%时,飞机将以预设巡航速度保持当前高度)。俯仰用于上升/下降。滚动、俯仰和偏航均由角度控制(因此不可能翻滚或环绕飞行器)。
对于新手来说,定位模式是最安全的固定翼手动模式。
高度模式
; ;![]()
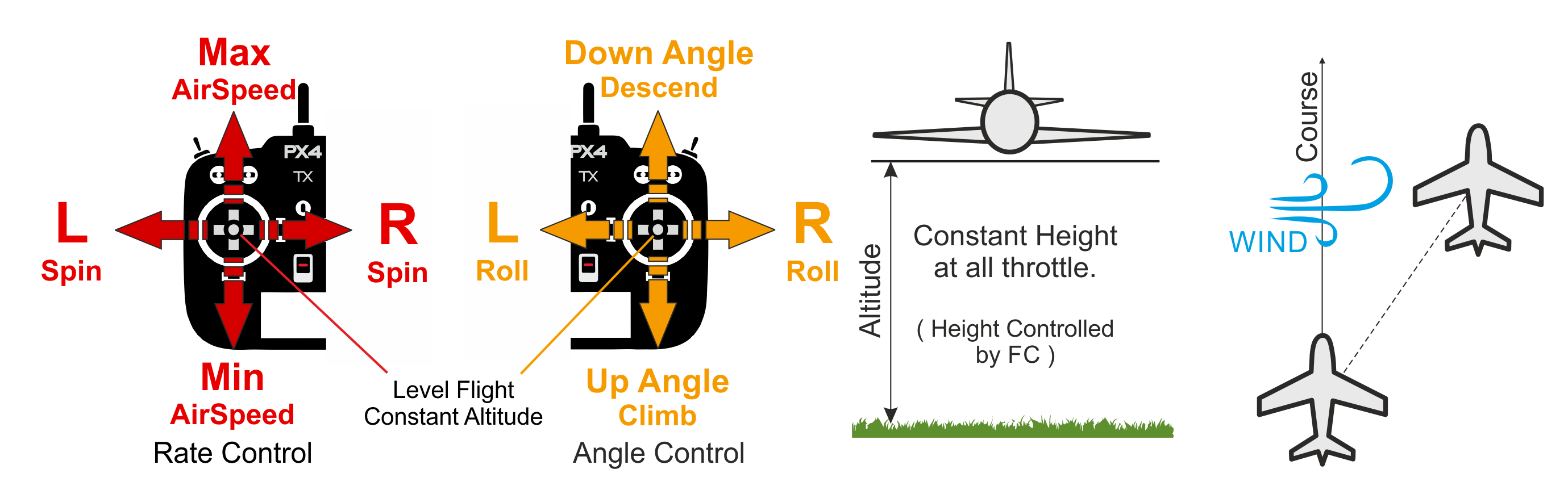
高度模式 使用户更容易控制飞行器的高度,特别是达到并保持固定的高度。该模式不会试图逆风保持飞行器航向。
爬升/下降速度由俯仰/升降杆控制。对中后,自动驾驶仪将锁定当前高度,并在偏航/滚动过程中和任何空速下保持该高度。油门输入控制空速。滚动和俯仰由角度控制(因此不可能翻滚或环绕飞行器)。
当所有遥控输入居中(无滚转、俯仰、偏航,油门约为 50%)时,飞机将恢复直线、水平飞行(受风力影响),并保持当前高度。
高度模式 是最安全的非 GPS 制导模式,适合初学者学习飞行。它就像 手册 但在松开俯仰杆时还能稳定飞行高度。
稳定模式
; ;
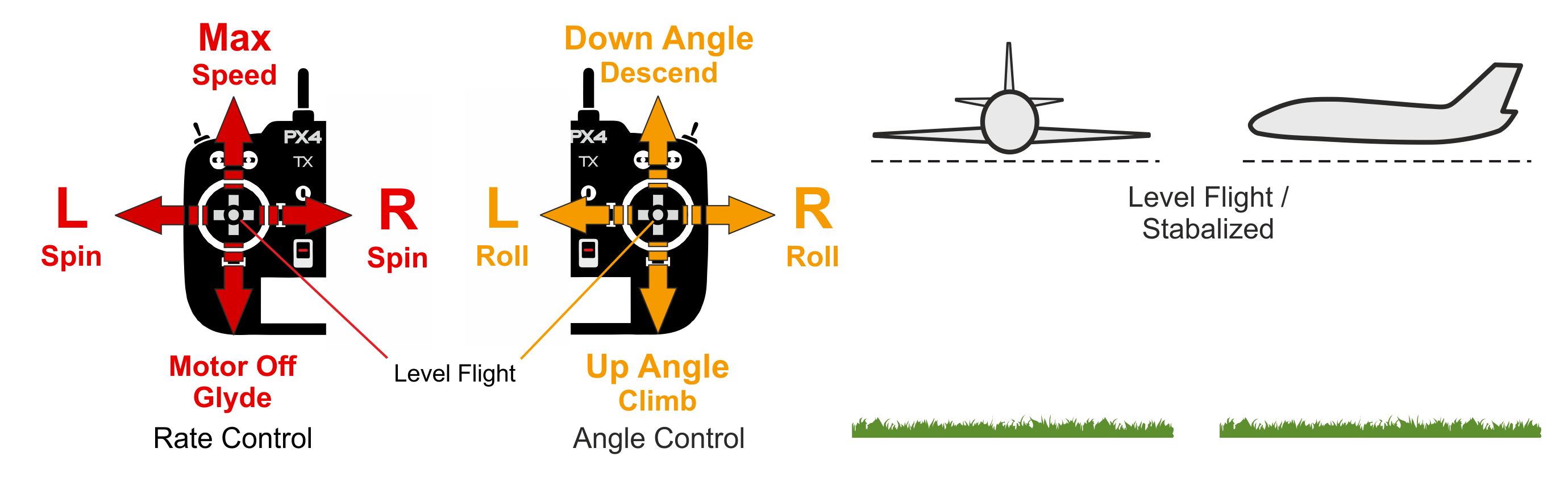
稳定模式 当遥控杆居中时,该模式会使飞行器进入直线和水平飞行状态,逆风时保持水平姿态(但不包括飞行器的航向和高度)。
飞行器根据俯仰输入进行爬升/下降,如果滚动/俯仰摇杆不为零,则执行协调转弯。滚动和俯仰均受角度控制(不能倒立滚动或循环滚动)。
稳定模式 比 手动模式 因为你不能滚动或翻转它,而且很容易通过控制杆居中来调平载具。
如果将油门降至 0%(电机停止),飞行器将滑行。要执行转弯,必须在整个操作过程中保持该指令,因为如果松开翻滚指令,飞机将停止转弯并自动调平(俯仰和偏航指令也是如此)。
Acro 模式
; ;
Acro 模式 是用于执行翻滚、空翻、失速和杂技动作等杂技动作的遥控模式。
滚动杆、俯仰杆和偏航杆控制围绕各自轴线的角度旋转速度,油门直接传递到输出混合器。当摇杆居中时,飞行器将停止旋转,但仍保持当前方向(侧向、倒置或其他),并根据当前动量移动。
手动模式
; ;
手动模式 将遥控棒输入直接发送到输出混音器,实现 "完全"手动控制。
这是最难飞的模式,因为没有任何东西是稳定的。与 Acro 模式 如果旋转操纵杆位于中心位置,飞行器不会自动停止绕轴旋转,驾驶仪实际上必须移动操纵杆才能向另一个方向施力。
这是唯一能覆盖 FMU 的模式(命令通过安全协处理器发送)。它提供了一种安全机制,在 FMU 固件出现故障时,可通过遥控装置完全控制油门、升降舵、副翼和方向舵。
保持模式
;
保持 使固定翼飞行器开始以当前高度围绕当前位置盘旋。该模式可用于暂停飞行任务或在紧急情况下帮助重新控制飞行器。它可以通过预编程的遥控开关或 QGroundControl 暂停 按钮。
返回模式
;
返回模式 使飞行器飞出一条通往安全地点的清晰路径。该模式可手动激活(通过预编程的遥控开关)或自动激活(例如,在发生以下情况时 故障安全 被触发)。
返回行为取决于参数设置,可能遵循任务路径和/或任务着陆模式(如果已定义)。默认情况下,固定翼飞行器将上升到安全高度,并使用任务着陆模式(如果有的话),否则它将飞到原点并盘旋。
任务模式
;
任务模式 使载具执行预定义的自主 使命 (飞行计划)上传到飞行控制器。任务通常由地面控制站(GCS)应用程序创建和上传。
PX4 通用控制系统被称为 QGroundControl. QGroundControl 是我们用于 配置 PX4.
起飞模式
;
起飞 模式启动飞行器起飞序列。具体的发射行为取决于所配置的起飞模式(弹射/悬挂发射模式或跑道起飞模式)。
降落模式
;
降落模式 会导致飞行器转向并在模式启用时的位置着陆。固定翼着陆逻辑和参数在该主题中有解释: 着陆(固定翼).
离机模式
;
机外模式 使固定翼飞行器服从通过 MAVLink 提供的姿态设定点。
该模式适用于配套计算机和地面站!
垂直起降(VTOL)
VTOL 飞机可以作为多旋翼飞行器或固定翼飞行器飞行。多旋翼模式主要用于起飞和着陆,而固定翼模式则用于高效飞行和/或执行任务。
一般来说,VTOL 飞行器的飞行模式与下列飞行模式相同 多旋翼机 在 多旋翼 模式下飞行时和 固定翼飞机 在 FW 模式下飞行时。
模式之间的切换由驾驶仪使用遥控开关启动,或在自动模式下由 PX4 在需要时自动启动。
几点说明
- VTOL 返回模式 如果已定义,则默认使用任务着陆。
更多信息
- 飞行 > 飞行模式 - 所有模式的详细技术说明
- 基本配置 > 飞行模式 - 如何将遥控开关映射到特定飞行模式