任务
规划任务
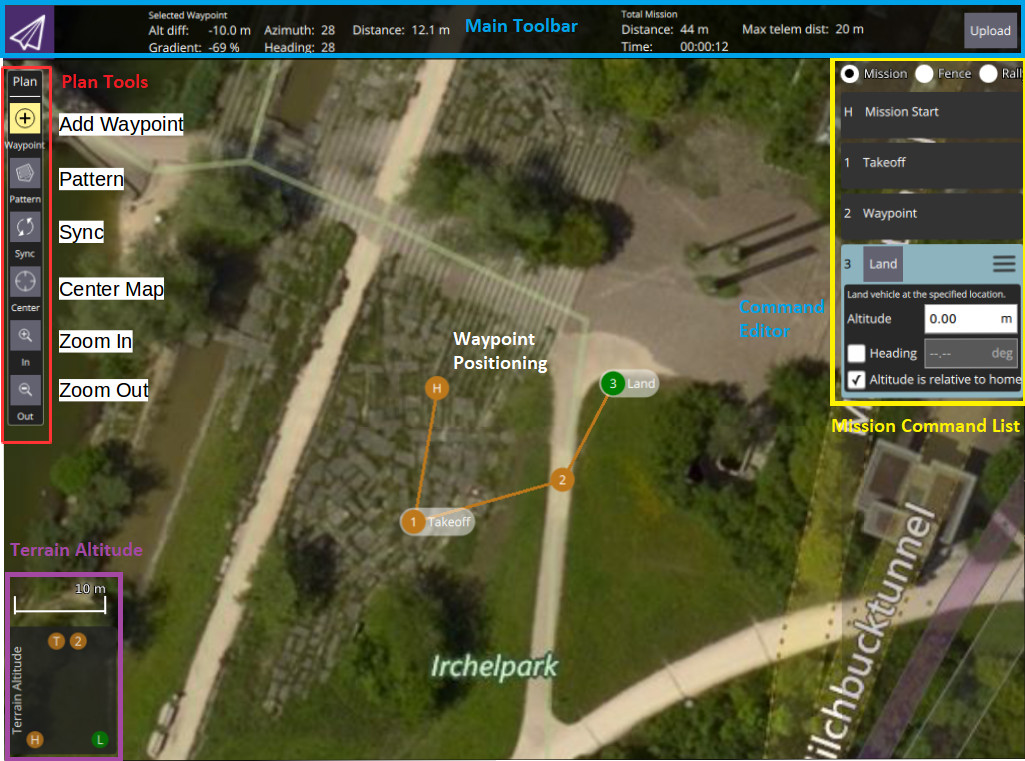
手动规划任务非常简单:
- 切换到任务视图
- 选择 添加航点 (加号)图标。
- 点击地图添加航点。
- 使用右侧的航点列表可修改航点参数/类型 底部的高度指示器可显示每个航点的相对高度。
- 完成后,点击 上传 按钮(右上角)将任务发送到载具。
您还可以使用 图案 自动创建调查网格的工具。
欲了解更多信息,请参阅 QGroundControl 用户指南.
设置载具偏航
如果设置了该参数,多旋翼飞行器将偏航,朝向 标题 目标航点中指定的值(对应于 MAV_CMD_NAV_WAYPOINT.param4).
如果 标题 未明确设置目标航点 (param4=NaN则载具将偏航至参数 MPC_YAW_MODE.默认情况下,这是下一个航点。
无法独立控制偏航和行驶方向的载具类型将忽略偏航设置(如固定翼)。
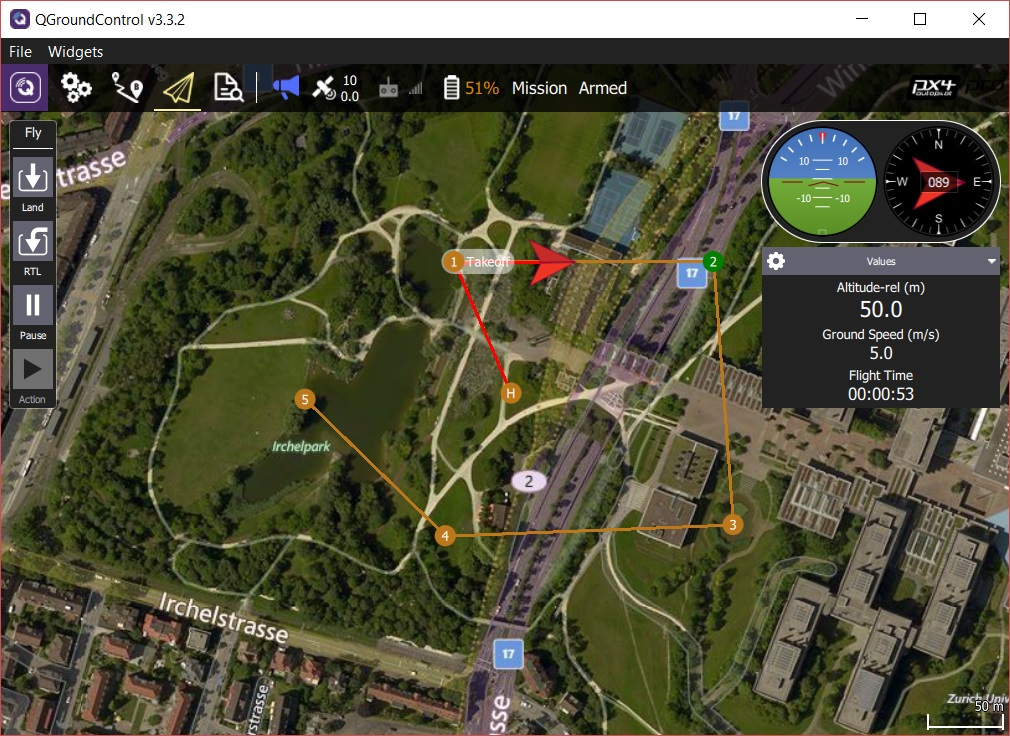
飞行任务
上传任务后,切换到飞行视图。任务的显示方式便于跟踪进度(在此视图中无法修改)。