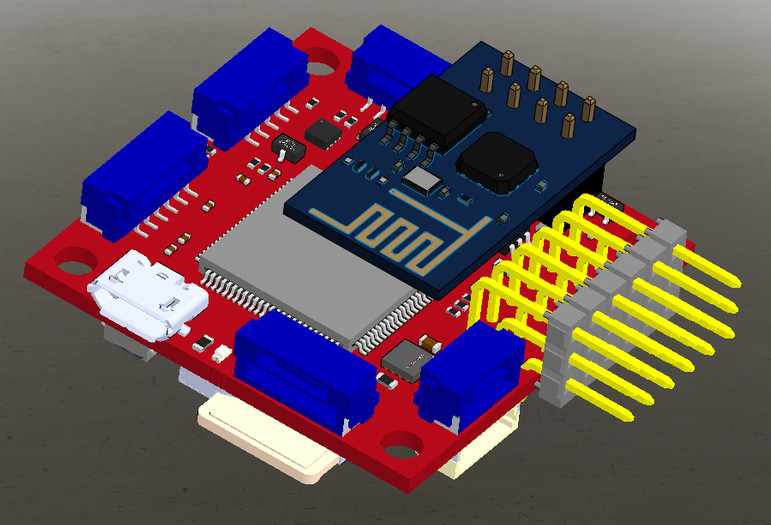
Pixracer
Pixhawk®; XRacer 板系列专为小型竞赛四驱车和飞机而优化。与 Pixfalcon 和 Pixhawk 它内置 Wifi、新型传感器、方便的全伺服头、CAN 和支持 2M 闪存。

该自动驾驶仪 支持 由 PX4 维护和测试小组负责。
主要功能
- 主片上系统: STM32F427VIT6 rev.3
- 中央处理器180 MHz ARM Cortex®; 配备单精度 FPU 的 M4
- 内存:256 kb Sram(L1)
- 标准 FPV 外形尺寸:36x36 毫米,标准孔型为 30.5 毫米
- Invensense®; ICM-20608 加速/陀螺(4 千赫兹)/ MPU9250 加速/陀螺/磁场(4 千赫兹)
- 带温度补偿的 HMC5983 磁强计
- 专业测量仪器公司 MS5611 气压计
- JST GH 接头
- microSD (记录)
- Futaba S.BUS 和 S.BUS2 / Spektrum DSM2 和 DSMX / Graupner SUMD / PPM 输入 / Yuneec ST24
- FrSky®; 遥测端口
- OneShot PWM 输出(可配置)
- 可选:安全开关和蜂鸣器
购买地点
Pixracer 可从 mRobotics.io.
配件包括
套件
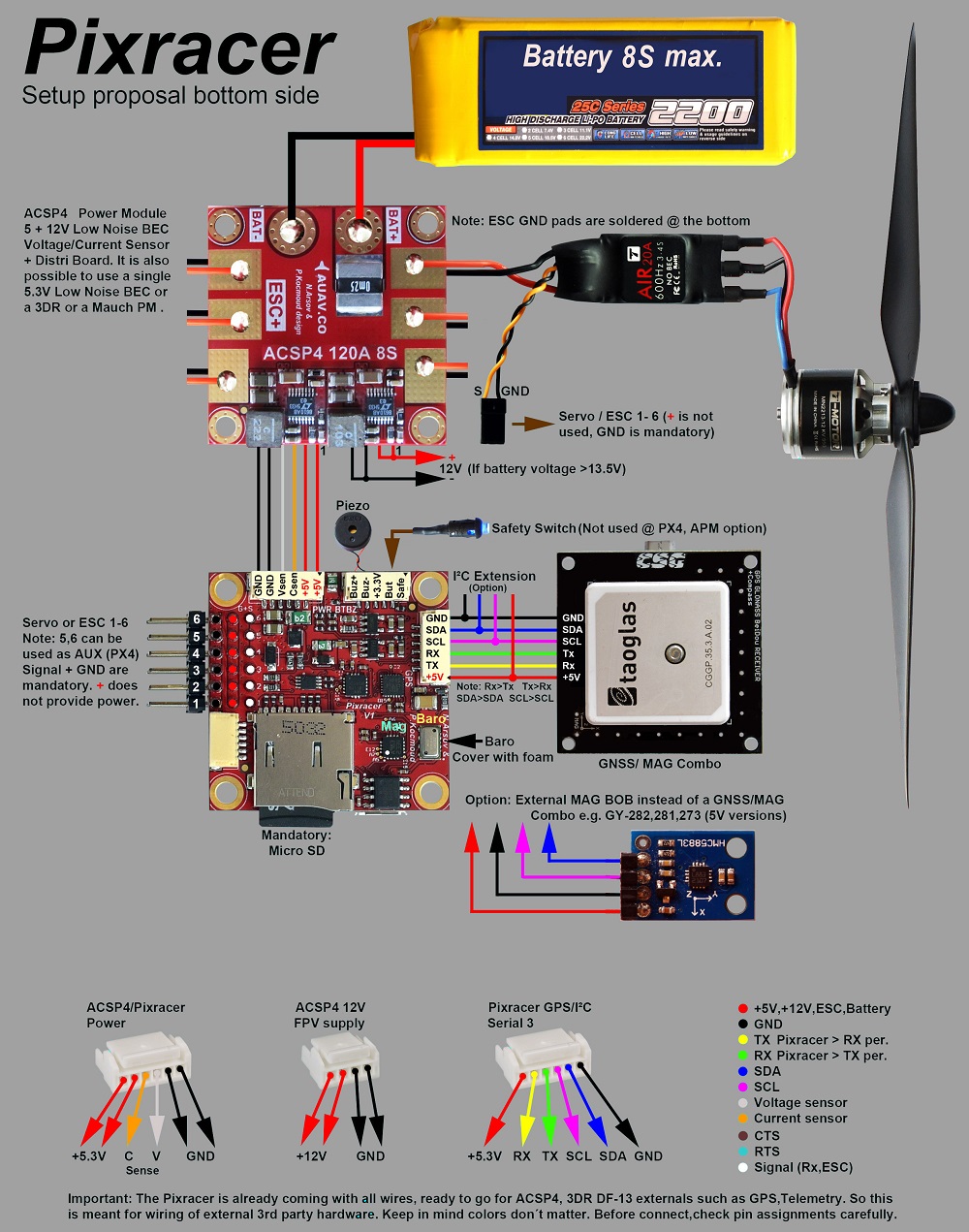
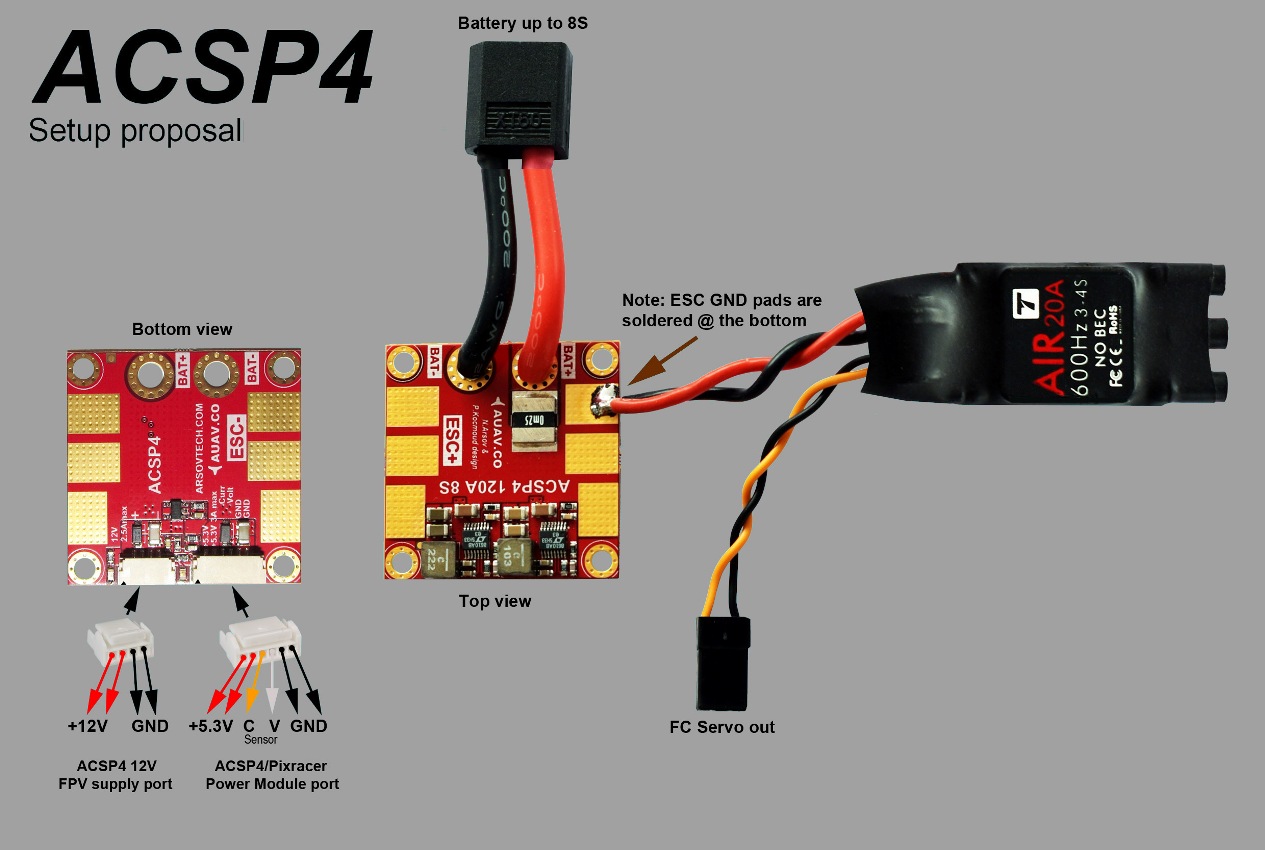
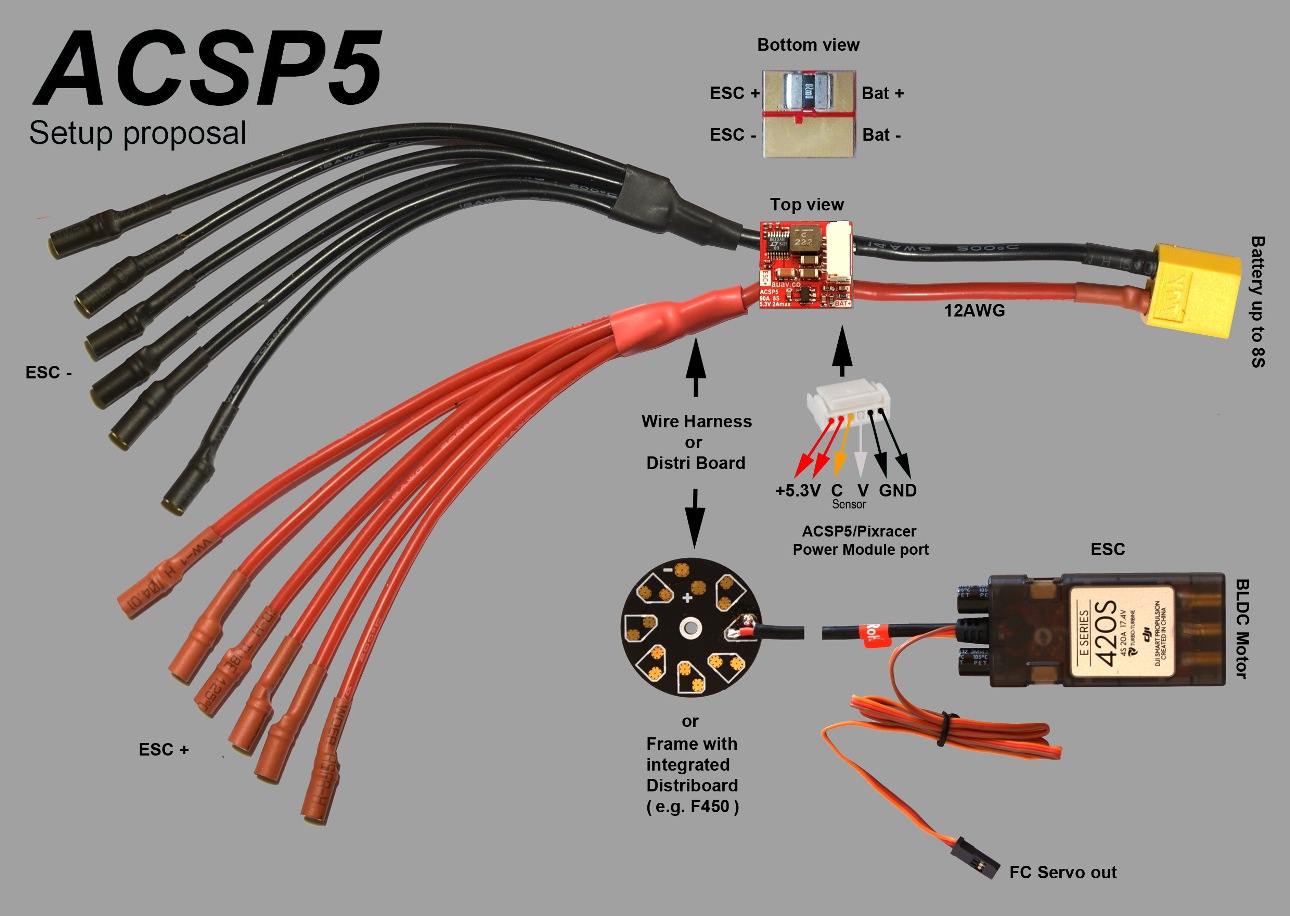
Pixracer 设计使用独立的航空电子设备电源。这是避免电机或电子调速器的电流浪涌流回飞行控制器并干扰其精密传感器所必需的。
- 电源模块(带电压和电流传感器)
- I2C 分路器(支持 AUAV、Hobbyking 和 3DR®; 外设)
- 适用于所有常见外设的电缆套件
无线网络(无需 USB)
电路板的主要功能之一是使用 Wifi 更新新固件、进行系统设置和飞行遥测。这使其无需任何桌面系统。
已提供设置和遥测功能,默认引导加载程序已支持固件升级,但尚未启用
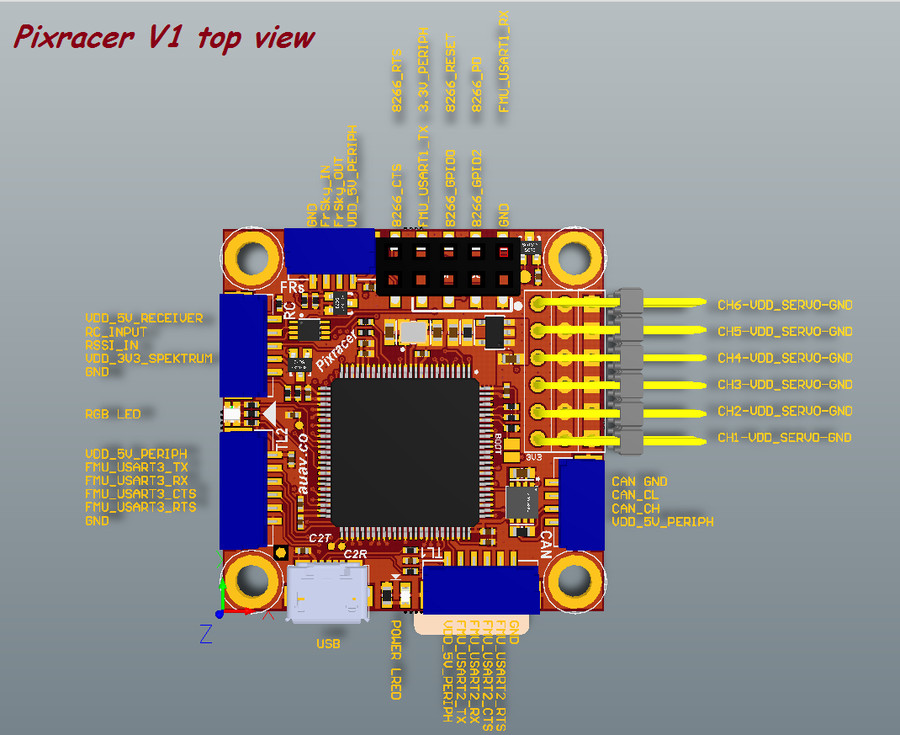
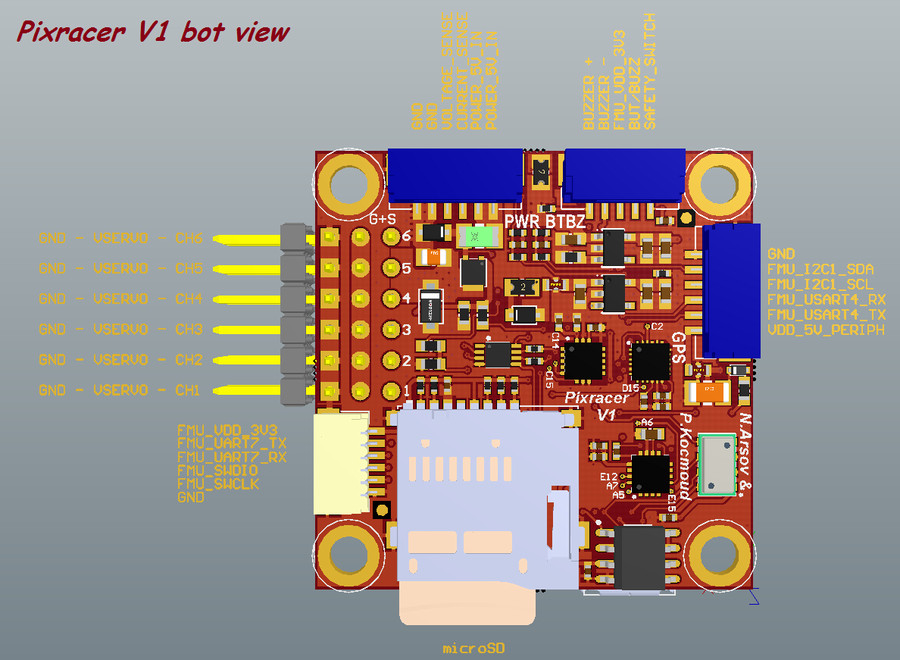
接线图
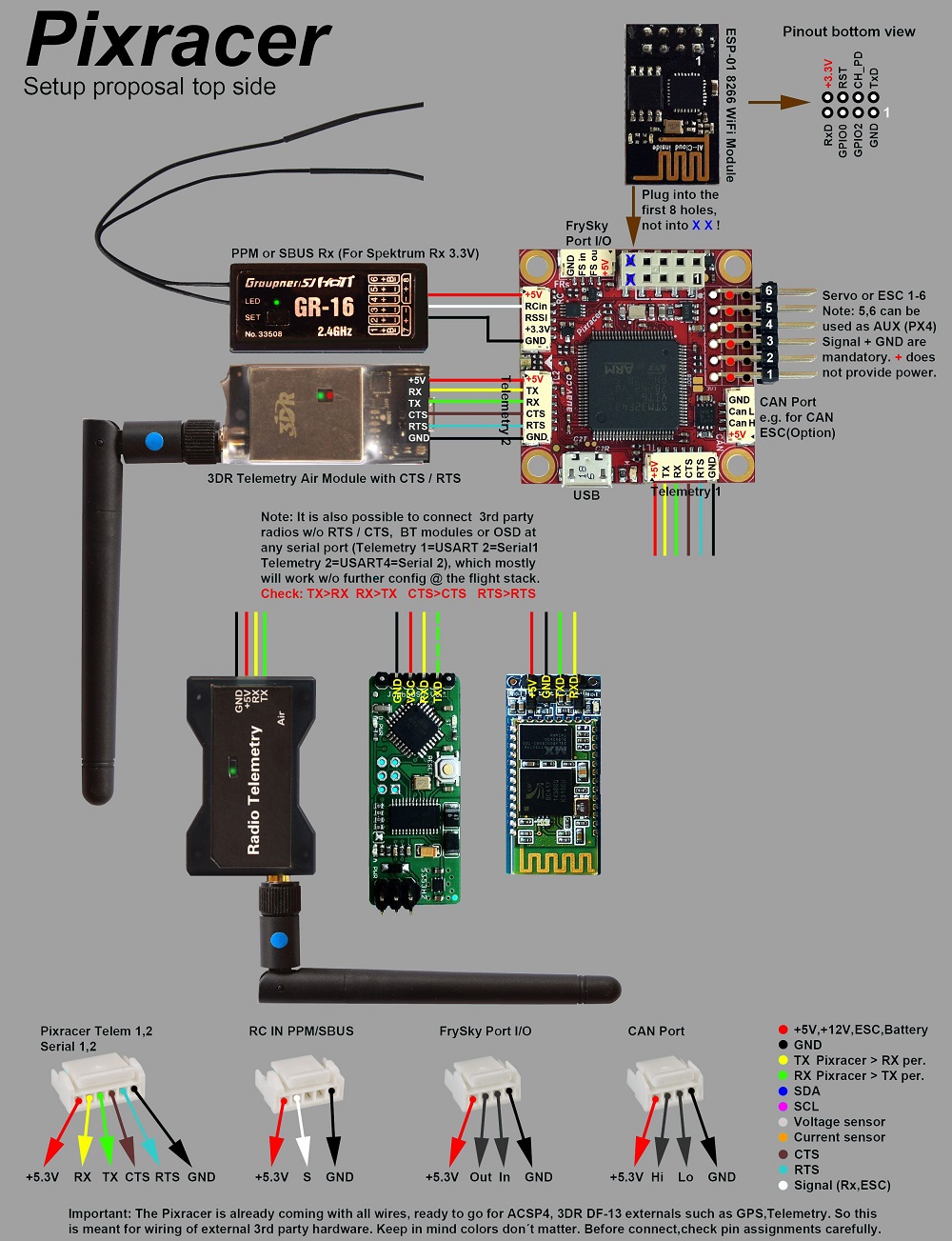

连接器
所有连接器都遵循 Pixhawk 连接器标准.除非另有说明,所有连接器均为 JST GH。
引脚
TELEM1, TELEM2+OSD 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS (IN) | +3.3V |
| 5(黑色) | RTS (OUT) | +3.3V |
| 6(黑色) | 接地 | 接地 |
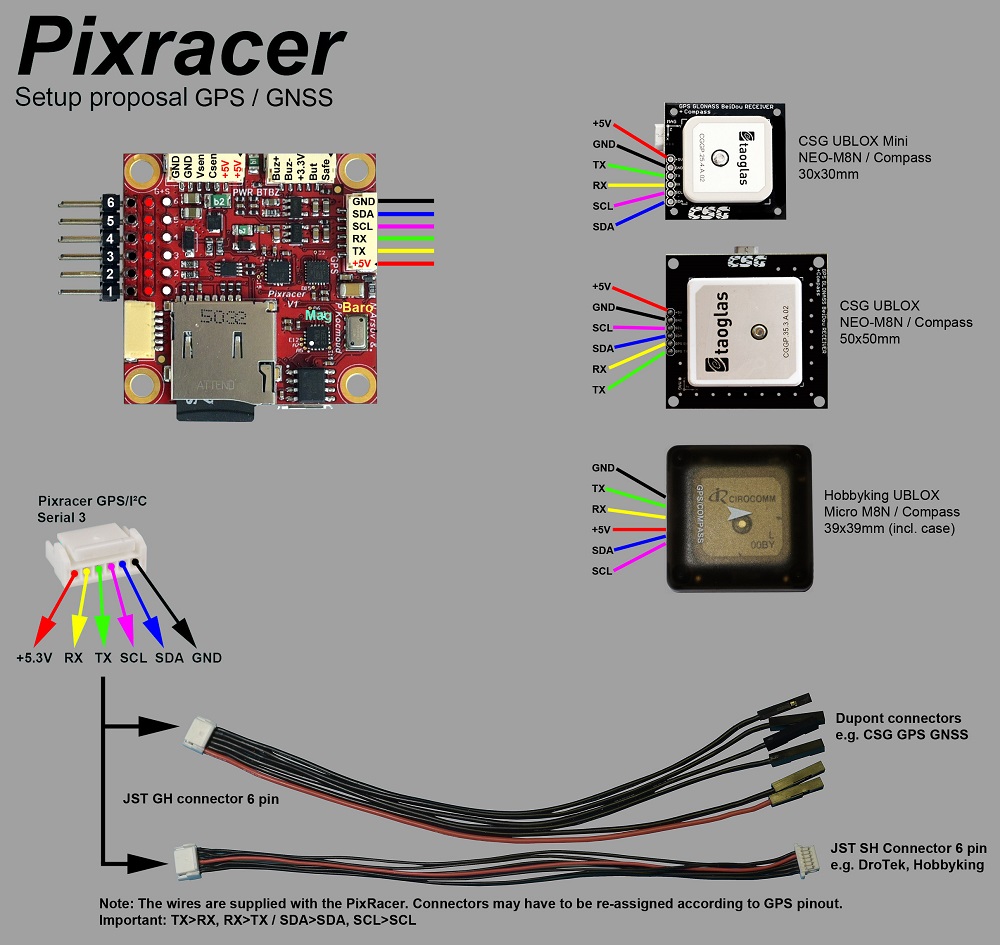
GPS 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | I2C1 SCL | +3.3V |
| 5(黑色) | I2C1 SDA | +3.3V |
| 6(黑色) | 接地 | 接地 |
FrSky 遥测/SERIAL4
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | 接地 | 接地 |
遥控输入(接受 PPM / S.BUS / Spektrum / SUMD / ST24)
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | RC IN | +3.3V |
| 3(黑色) | RSSI 输入 | +3.3V |
| 4(黑色) | VDD 3V3 | +3.3V |
| 5(黑色) | 接地 | 接地 |
CAN
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
权力
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | VCC | +5V |
| 3(黑色) | 当前 | +3.3V |
| 4(黑色) | 电压 | +3.3V |
| 5(黑色) | 接地 | 接地 |
| 6(黑色) | 接地 | 接地 |
开关
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | 安全 | 接地 |
| 2(黑色) | !IO_LED_SAFETY | 接地 |
| 3(黑色) | VCC | +3.3V |
| 4(黑色) | BUZZER- | - |
| 5(黑色) | BUZZER+ | - |
调试端口
这是一个 Pixhawk 调试端口 (JST SM06B 连接器)。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | Vcc 目标移位 | +3.3V |
| 2(黑色) | 控制台发送(输出) | +3.3V |
| 3(黑色) | 控制台 RX(输入) | +3.3V |
| 4(黑色) | SWDIO | +3.3V |
| 5(黑色) | SWCLK | +3.3V |
| 6(黑色) | 接地 | 接地 |
有关该端口的布线和使用信息,请参见:
- PX4 系统控制台 (注意,FMU 控制台映射到 UART7)。
- SWD (JTAG) 硬件调试接口
串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| UART1 | /dev/ttyS0 | WiFi (ESP8266) |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | ||
| UART7 | 控制台 | |
| UART8 | 序号4 |
示意图
参考文献如下 Altium 设计文件
以下 PDF 文件用于 只为方便:
- pixracer-rc12-12-06-2015-1330.pdf
- pixracer-r14.pdf - R14 或 RC14 印在 SDC 卡插座旁边
构建固件
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v4_default
荣誉
该设计由尼克-阿尔索夫和菲利普-科克穆德创作,由洛伦兹-迈尔、大卫-西德兰和伦纳德-霍尔设计。