飞行控制器/传感器方向
默认情况下,飞行控制器(和外部指南针(如果有))应顶部朝上放置在机架上,方向箭头指向飞行器前方。如果电路板或外部指南针安装在其他方向,则需要在固件中进行配置。
计算方向
YAW、PITCH和/或ROLL偏移量的计算是相对于 "向前-朝上-朝右 "方向(分别绕Z轴、Y轴和X轴按时钟方向旋转)进行的。该帧称为 车身框架 和默认方向为 旋转_无.
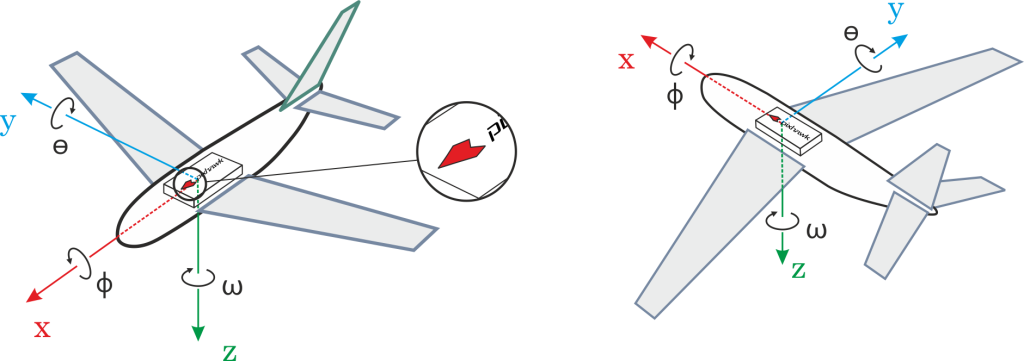
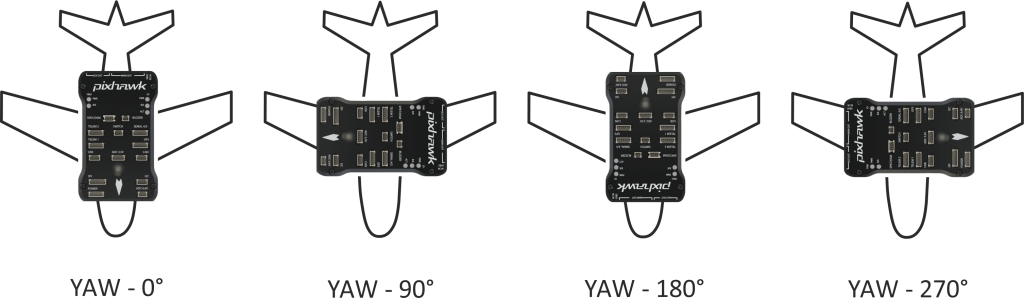
例如,下图中的载具绕 Z 轴的旋转(仅)对应于: 旋转_无, 旋转偏航 90,旋转_偏航_180,旋转_偏航_270.
设置方向
设置方向
- 开始 QGroundControl 并连接载具。
- 选择 齿轮 图标(载具设置),然后点击 传感器 在侧边栏中。
- 选择 设置方向 按钮。
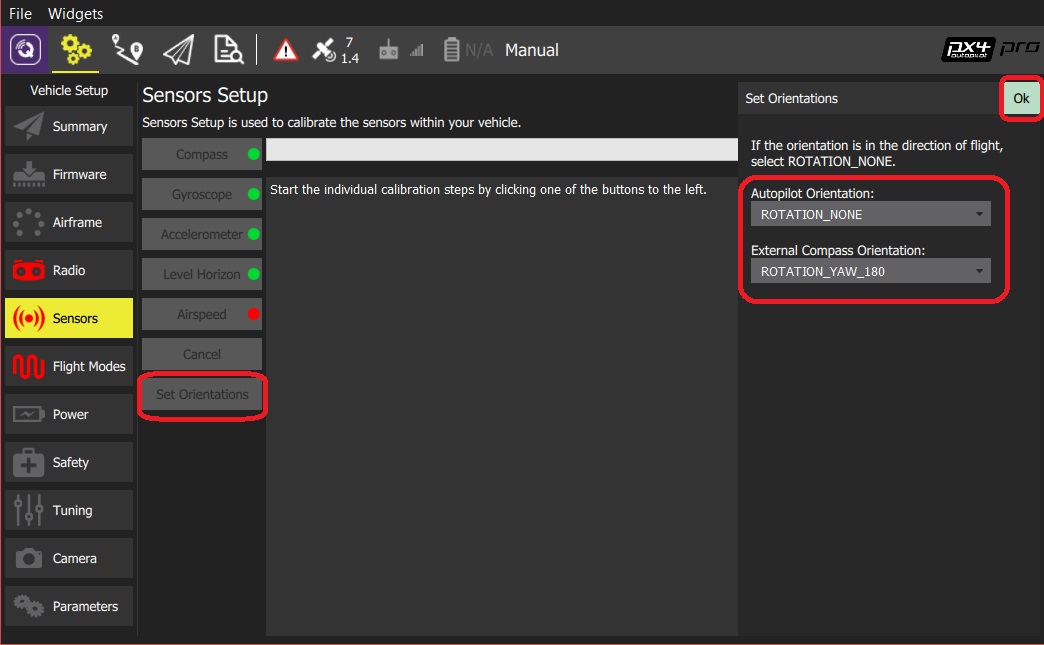
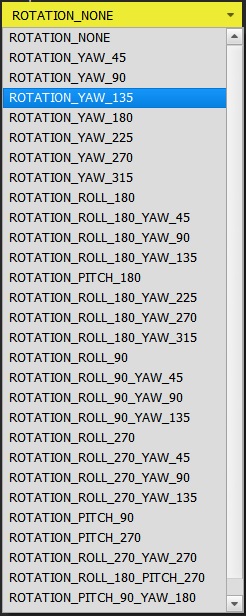
选择 自动驾驶仪定位 (作为 以上计算).
- 选择 外部指南针方向 以同样的方式进行操作(只有当载具配有外置指南针时才会显示该选项)。
- 新闻 好的.
微调
您可以使用 水平线校准 以补偿控制器方向上的微小偏差,并在飞行视图中拉平地平线。
更多信息
- 高级方向调整 (仅限高级用户)。
- QGroundControl 用户指南 > 传感器