# 安全配置(防故障装置)
PX4 具有多种安全功能,可在发生意外时保护和恢复您的载具:
- 故障保险 您可以指定在哪些区域和条件下可以安全飞行,而 行动 如果触发故障安全,将执行哪些操作(例如着陆、保持位置或返回指定点)。最重要的故障安全设置配置在 QGroundControl 安全设置 页。其他必须通过 参数.
- 安全开关 如果出现问题,可以使用遥控器上的 "停止 "按钮立即停止电机或返回载具。
# 故障安全操作
当触发故障安全机制时,默认行为(对于大多数故障安全机制)是进入 "保持 "状态。 COM_FAIL_ACT_T 秒后才执行相关的故障安全操作。这样用户就有时间注意到正在发生的情况,并在必要时覆盖失控保护。在大多数情况下,这可以通过使用遥控装置或通用控制系统切换模式来实现(注意,在故障安全保持期间,移动遥控杆不会触发覆盖)。
下面的列表显示了所有故障保护动作的集合,按严重程度递增排列。请注意,不同类型的故障保险可能不支持所有这些操作。
| 行动 | 说明 |
|---|---|
| 无/失能 | 无操作。故障保护将被忽略。 |
| 警告 | 将发送一条警告信息(即发送至 QGroundControl). |
| 保持模式 | 载具将进入 保持模式 (MC) 或 保持模式 (FW) 并分别悬停或盘旋。VTOL 飞行器将根据其当前模式(MC/FW)保持不动。 |
| 返回模式 | 载具将进入 返回模式.返回行为可以在 返回主页设置 (下图)。 |
| 降落模式 | 载具将进入 降落模式 (MC) 或 降落模式 (FW)并着陆。VTOL 会首先过渡到 多旋翼 模式。 |
| 解除上膛 | 立即停止电机。 |
| 航班终止 | 关闭所有控制器,并将所有 PWM 输出设置为故障安全值(例如 PWM_MAIN_FAILn, PWM_AUX_FAILn).故障安全输出可用于展开降落伞、起落架或执行其他操作。对于固定翼飞行器来说,这可以使飞行器滑行到安全地带。 |
如果触发了多个故障保险,则会采取更严重的措施。例如,如果 RC 和 GPS 都丢失,而手动失控设置为 返回模式 和 GCS 链路损耗 土地土地被执行。
TIP
可以使用 故障安全状态机模拟.
# QGroundControl 安全设置
QGroundControl 安全设置页面可通过点击 QGroundControl 图标、 载具设置然后 安全 侧边栏)。这包括最重要的故障安全设置(电池、RC 丢失等)和触发操作的设置 返回 和 土地.
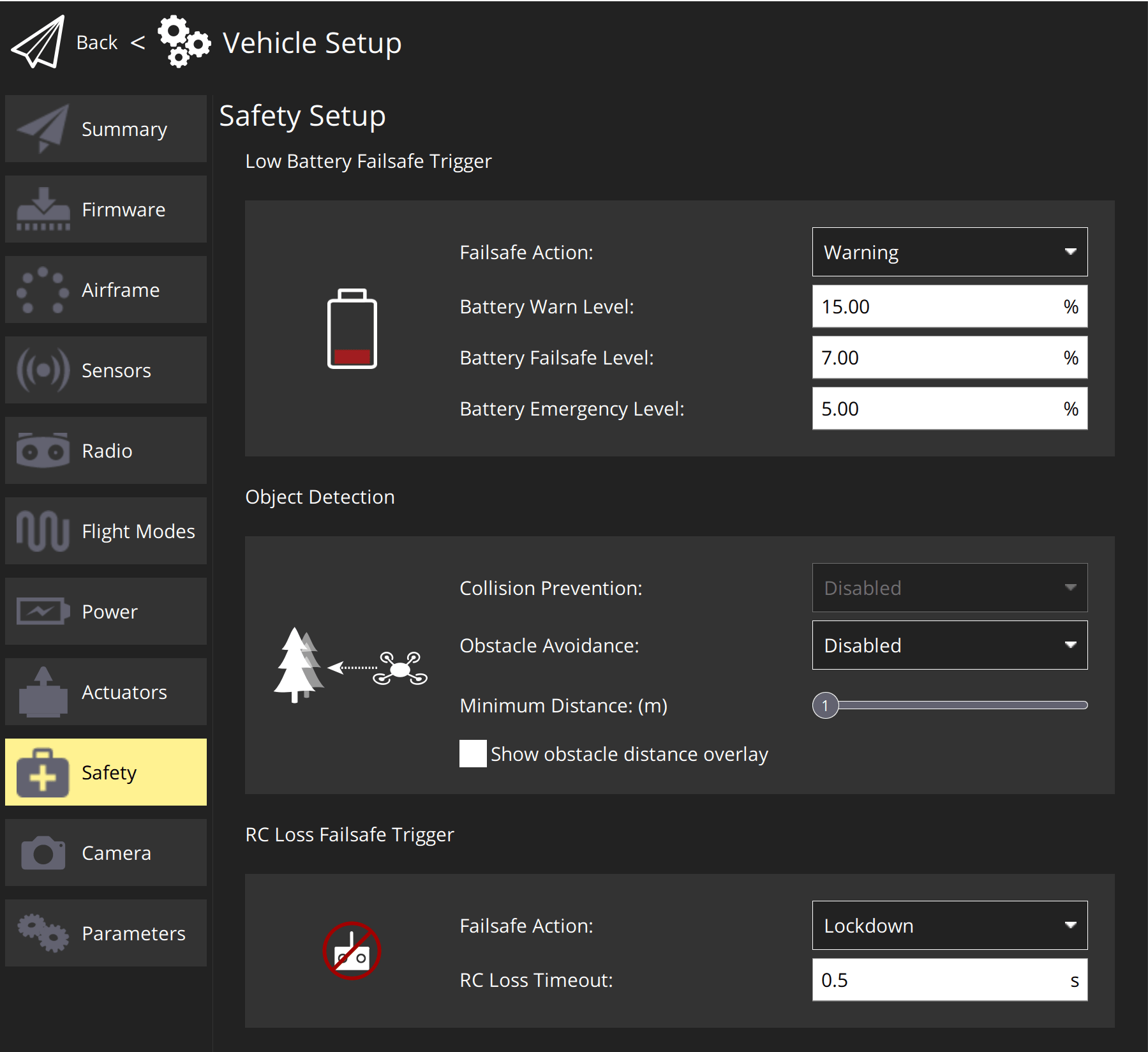
# 低电池故障安全保护
当电池容量低于一个(或多个)警告水平值时,就会触发低电量故障保护。

最常见的配置是如上所述设置值和操作(使用 警报;故障安全;紧急状况).在这种配置下,如果容量下降到相应水平以下,故障保护器将触发警告,然后返回,最后着陆。
还可以设置 故障安全动作 警告、返回或降落时 电池故障安全电平 达到故障安全级别。
设置和基本参数如下所示。
| 设置 | 参数 | 说明 |
|---|---|---|
| 故障安全动作 | Com_low_bat_act | 当容量降到以下时,发出警告、返回或降落 电池故障安全电平或 警告,然后返回,然后根据以下每个级别设置着陆。 |
| 电池电量警告级别 | BAT_LOW_THR | 发出警告(或采取其他行动)的能力百分比。 |
| 电池故障安全电平 | BAT_CRIT_THR | 返回行动(或其他行动,如果选择的是单一行动)的百分比容量。 |
| 电池应急水平 | 蝙蝠 | 触发陆地(立即)行动的能力百分比。 |
# 手动失控保护
如果在下列情况下,可能会触发手动失控保护装置 遥控发射器 或 操纵杆 会丢失,而且没有后备方案。如果使用 遥控发射器 如果 RC 发射机链路丢失.如果使用 操纵杆 如果通过 MAVLink 数据链路连接,则在操纵杆断开或数据链路丢失时触发。
备注
还需要对 PX4 和接收器进行配置,以便 检测 RC 丢失: 无线电设置 > RC 损失检测.

通过 QGCroundControl 安全用户界面,您可以设置 故障保护动作 和 RC 丢失超时.如果用户希望在特定自动模式(任务、保持、离机)下禁用遥控失效保险,可以使用参数 COM_RCL_EXCEPT.
其他(基本)参数设置如下所示。
| 参数 | 设置 | 说明 |
|---|---|---|
| COM_RC_LOSS_T | 手动控制失效超时 | 从所选手动控制源接收到最后一个设定点之后的时间,在该时间之后手动控制将被视为失效。该时间必须保持较短,因为载具将继续使用旧的手动控制设定点飞行,直到超时触发。 |
| COM_FAIL_ACT_T | 故障安全反应延迟 | 以秒为单位的故障安全条件触发延迟 (COM_RC_LOSS_T)和故障安全动作(RTL、着陆、保持)。在这种状态下,飞行器在保持模式下等待手动控制源重新连接。在长距离飞行时,可以将其设置得更长一些,这样间歇性的连接中断就不会立即触发故障安全保护。也可以设置为零,以便立即触发故障安全保护。 |
| NAV_RCL_ACT | 故障安全动作 | 禁用、悬停、返回、着陆、解除、终止。 |
| COM_RCL_EXCEPT | 遥控损失例外 | 设置忽略手动失控的模式:任务、保持、离机。 |
# 数据链路失效保护
如果遥测链路(与地面站的连接)丢失,将触发数据链路丢失故障保护。

设置和基本参数如下所示。
| 设置 | 参数 | 说明 |
|---|---|---|
| 数据链路丢失超时 | COM_DL_LOSS_T | 失去数据连接后触发故障安全的时间。 |
| 故障安全动作 | NAV_DLL_ACT | 禁用、保持模式、返回模式、降落模式、撤膛、终止。 |
# 地理围栏故障安全
地理围栏故障安全 是一个以原点为中心的虚拟圆柱体。如果载具移动到半径之外或高度之上,指定的 故障安全动作 就会触发。

TIP
PX4 还支持更复杂的 GeoFence 几何结构,包括多个任意多边形和圆形的包含区和排除区: 飞行 > GeoFence.
设置和基本 地理围栏参数 如下所示。
| 设置 | 参数 | 说明 |
|---|---|---|
| 对违规行为采取的行动 | GF_ACTION | 无、警告、保持模式、返回模式、终止、着陆。 |
| 最大半径 | gf_max_hor_dist | 地理围栏圆柱体的水平半径。如果为 0,则禁用地理围栏。 |
| 最大高度 | gf_max_ver_dist | 地理围栏圆柱体的高度。如果为 0,则禁用地理围栏。 |
备注
设置 GF_ACTION 终止时,会在载具违反围栏规定时将其熄火。鉴于其固有的危险性,该功能可通过使用 cbrk_flightterm需要重置为 0 才能真正关闭系统。
以下设置也适用,但不显示在 QGC UI 中。
| 设置 | 参数 | 说明 |
|---|---|---|
| 地理围栏高度模式 | GF_ALTMODE | 使用的高度基准:0 = wgs84,1 = amsl。 |
| 地理围栏计数器限制 | GF_COUNT | 设置需要在栅栏外进行多少次后续位置测量才会触发地理栅栏违规。 |
| 地理围栏源 | GF_SOURCE | 设置位置来源是估计的全球位置还是直接来自 GPS 设备。 |
| 先发制人的地理围栏触发 | GF_PREDICT | (实验)如果预测载具的当前运动会触发入侵(而不是在入侵后触发),则触发地理围栏。 |
| 用于飞行终止的断路器 | cbrk_flightterm | 启用/禁用飞行终止操作(默认为禁用)。 |
# 返回模式设置
返回 是一种常见的 故障保护动作 让 返回模式 使飞行器返回原点。本节将介绍如何设置返回后的着陆/着陆行为。

设置和基本参数如下所示:
| 设置 | 参数 | 说明 |
|---|---|---|
| 爬升到高空 | RTL_RETURN_ALT | 飞行器上升到这个最低高度(如果低于这个高度)进行返航。 |
| 返回行为 | 选择列表 然后返回:着陆、着陆但不着陆或着陆并在指定时间后着陆。 | |
| 着陆高度 | rtl_descend_alt | 如果选择 "悬停返回",还可以指定飞行器停留的高度。 |
| 装载时间 | RTL_LAND_DELAY | 如果选择 "先返回后着陆",您还可以指定载具的停留时间。 |
备注
返回行为的定义是 RTL_LAND_DELAY.如果是否定的,载具将立即着陆。更多信息请参阅 返回模式.
# 降落模式设置
降落在当前位置 是一种常见的 故障保护动作 (特别是对于多旋翼飞行器而言),这就需要 降落模式.本节说明了如何控制飞行器何时以及是否在着陆后自动解除警报。对于多旋翼飞行器(仅限),您还可以设置下降率。

设置和基本参数如下所示:
| 设置 | 参数 | 说明 |
|---|---|---|
| 之后解除 | com_disarm_land | 选择复选框可指定飞行器在着陆后解除警报。数值必须不为零,但可以是几分之一秒。 |
| 着陆下降率(仅限 MC) | MPC_LAND_SPEED | 下降速度 |
# 其他故障安全设置
本节包含有关故障安全设置的信息,这些设置无法通过 QGroundControl 安全设置 page.
# 位置 (GPS) 丢失故障安全保护
位置丢失故障安全 如果 PX4 定位估算的质量低于可接受的水平(可能是 GPS 丢失造成的),则在需要可接受的定位估算的模式下触发。
故障动作由 com_posctl_navl根据是否有遥控(以及高度信息)来确定:
0:提供遥控器。切换至 高度模式 如果有高度估计值,否则 稳定模式.1:遥控器 不 可用。切换到 降落模式 如果有高度估计值,则输入 "飞行终止"。
固定翼飞行器和 VTOL 飞行器在固定翼飞行时还有一个参数 (FW_GPSF_LT),该参数定义了它们的悬停时间(以恒定的滚动角 (FW_GPSF_R)在当前高度的位置)后再尝试着陆。如果 VTOL 被配置为切换到悬停状态着陆 (NAV_FORCE_VT),那么它们就会先过渡,然后下降。
所有载具的相关参数如下。
| 参数 | 说明 |
|---|---|
| com_pos_fs_delay | 失位后触发故障安全保护前的延时。 |
| com_posctl_navl | 任务期间定位控制导航丢失的响应。数值:0 - 假设使用 RC,1 - 假设不使用 RC。 |
只影响固定翼飞行器的参数:
| 参数 | 说明 |
|---|---|
| FW_GPSF_LT | 等待时间(在进入着陆或飞行终止前等待 GPS 恢复)。设置为 0 则禁用。 |
| FW_GPSF_R | 固定盘旋时的滚动/倾斜角度。 |
# 机外失效保险
机外失效保险 如果在离船控制状态下失去离船连接,则会触发故障保护。可根据是否存在遥控连接指定不同的故障安全行为。
相关参数如下:
| 参数 | 说明 |
|---|---|
| COM_OF_LOSS_T | 失去机载连接后触发故障保护前的延迟时间。 |
| COM_OBL_RC_ACT | 如果有遥控装置,可进行故障安全操作:位置模式、高度模式、手动模式、返回模式、着陆模式、保持模式。 |
# 任务可行性检查
我们会进行一系列检查,以确保任务只有在符合以下条件时才能启动 可行.例如,检查确保第一个航点不会太远,任务飞行路径不会与任何地理围栏冲突。
严格来说,这些并不是故障防范措施,因此将其记录在 任务模式 > 任务可行性检查.
# 交通规避故障安全系统
交通规避故障安全功能允许 PX4 响应应答器数据(例如来自 ADSB 转发器)在执行任务期间。
相关参数如下:
| 参数 | 说明 |
|---|---|
| 避免导航 | 设置故障安全动作:禁用、警告、返回模式、着陆模式。 |
# 垂起固定翼故障安全系统
当 VTOL 飞行器无法再以固定翼模式飞行时(可能是由于推杆电机、空速传感器或控制面发生故障)的故障保护装置。如果触发了故障安全保护,飞行器将立即切换到多旋翼模式,并执行参数 COM_QC_ACT.
备注
发送 MAVLINK 命令也可触发四通道。 mav_cmd_doo_vtol_transition (打开新窗口) 带 参数2 设为 1.
下表列出了控制何时触发垂起固定翼的参数。
| 参数 | 说明 |
|---|---|
| COM_QC_ACT | 切换到多旋翼飞行后的垂起固定翼动作。可设置为 警告, 返回, 土地, 保持. |
| VT_FW_QC_HMAX | 最大垂起固定翼高度,低于该高度时垂起固定翼故障安全保护装置无法触发。这可以防止高空垂起固定翼下降,因为高空垂起固定翼下降会耗尽电池(本身也会导致坠机)。高度是相对于地面、原点或本地原点的高度(按优先顺序排列,具体取决于可用的参数)。 |
| VT_QC_ALT_LOSS | 无指令下降垂起固定翼高度阈值。 在高度控制模式下,例如 保持模式, 位置模式, 高度模式或 任务模式,飞行器应跟踪其当前的指令高度设定点。如果飞行器的高度低于指令设定点(该参数中定义的数值)太多,则会触发垂起固定翼失控保护。 请注意,只有当飞行器持续失去低于指令设定点的高度时,才会触发四通道伞;如果指令高度设定点的增加速度超过了飞行器的跟进速度,则不会触发四通道伞。 |
| vt_qc_t_alt_loss | 在 VTOL 过渡到固定翼飞行期间触发四副降落伞的高度损失阈值。如果飞行器在完成过渡前下降到低于初始高度的这一水平,就会触发四副降落伞。 |
| VT_FW_MIN_ALT | 固定翼飞行时高于原点的最低高度。在固定翼飞行中,当高度低于此值时,飞行器会触发四副降落伞。 |
| VT_FW_QC_R | 在 FW 模式下触发四通道的绝对滚动阈值。 |
| VT_FW_QC_P | 在 FW 模式下触发四阶梯的绝对频率阈值。 |
# 故障探测器
故障检测器可在载具意外翻转或收到外部故障检测系统通知时采取保护措施。
期间 飞行故障检测器可用于触发 飞行终止 如果满足失败条件,可能会启动 跳伞 或执行其他操作。
备注
飞行过程中的故障检测默认为停用(通过设置参数启用): cbrk_flightterm=0).
期间 起飞 故障检测器 态度触发器 调用 撤膛行动 如果飞行器翻转(解除解除会杀死发动机,但与飞行终止不同,不会启动降落伞或执行其他故障操作)。请注意,该检查是 起飞时始终启用无论 cbrk_flightterm 参数。
故障检测器在所有载具类型和模式下都处于激活状态,除非载具是 预期 进行翻转(即 Acro 模式 (MC), Acro 模式 (FW)和 手册 (FW)).
# 态度触发器
故障检测器可配置为在载具姿态超过预定的俯仰和滚动值超过规定时间时触发。
相关参数如下:
| 参数 | 说明 |
|---|---|
| cbrk_flightterm | 飞行终止断路器。从 121212(默认值)取消设置,以启用因故障检测器或 FMU 丢失而终止飞行的功能。 |
| FD_FAIL_P | 允许的最大间距(单位:度)。 |
| FD_FAIL_R | 允许的最大滚动角度(单位:度)。 |
| FD_FAIL_P_TTRI | 超过时间 FD_FAIL_P 用于故障检测(默认为 0.3 秒)。 |
| FD_FAIL_R_TTRI | 超过时间 FD_FAIL_R 用于故障检测(默认为 0.3 秒)。 |
# 外部自动触发系统 (ATS)
故障检测器如果 启用此外,还可以通过外部 ATS 系统来触发"......"。外部触发系统必须连接到飞行控制器端口 AUX5(或没有 AUX 端口的电路板上的 MAIN5),并使用以下参数进行配置。
备注
外部自动售票系统有以下要求 ASTM F3322-18 (打开新窗口).自动变电站设备的一个例子是 果味槽哨兵自动触发系统 (打开新窗口).
| 参数 | 说明 |
|---|---|
| FD_EXT_ATS_EN | 启用 AUX5 或 MAIN5(取决于电路板)上的 PWM 输入,以便从外部自动触发系统 (ATS) 启动故障安全保护。默认值:已禁用。 |
| fd_ext_ats_trig | 外部自动触发系统的 PWM 阈值,用于触发故障安全。默认值:1900 ms。 |
# 紧急开关
可配置远程控制开关(作为 QGroundControl 飞行模式设置) ,以便在出现问题或紧急情况时迅速采取纠正措施;例如,停止所有电机,或启动 返回模式.
本节列出了可用的紧急开关。
# 关闭开关
熄火开关会立即停止所有电机输出(如果飞行,飞行器会开始下降)!如果在 5 秒内重新启动开关,则电机将重新启动。5 秒钟后,飞行器将自动解除上膛;您需要再次上膛才能启动电机。
# 上膛/撤膛开关
上膛/撤膛开关是一个 直接替换 用于默认的基于摇杆的上膛/撤膛机制(目的相同:确保在电机启动/停止之前有一个有意的步骤)。与默认机制相比,它可以优先使用,因为
- 比起棍棒运动,人们更喜欢开关运动。
- 它可以避免在空中通过特定的摇杆动作意外触发上膛/撤膛。
- 没有延迟(立即反应)。
上膛/撤膛开关会立即解除(停止)电机的上膛,以便 飞行模式 那 飞行中解除支持.其中包括
- 手动模式
- Acro 模式
- 稳定
对于不支持在飞行中解除警报的模式,在飞行过程中开关将被忽略,但在检测到着陆后可以使用。这包括 位置模式 和自主模式(例如 使命, 土地 等等)。
备注
自动解除警报超时 (例如通过 com_disarm_land)与上膛/撤膛开关无关,也就是说,即使开关已上膛,超时仍将起作用。
# 返回开关
返回开关可用于立即启动 返回模式.
# 其他安全设置
# 自动解除警报超时
您可以设置超时,以便在飞行器起飞和/或着陆速度太慢时自动解除其上膛(解除上膛后,飞行器的发动机将失去动力,因此螺旋桨不会旋转)。
相关参数 如下所示:
| 参数 | 说明 |
|---|---|
| com_disarm_land | 着陆后自动撤膛的超时时间。 |
| com_disarm_prflt | 如果载具起飞太慢,自动解除警报超时。 |