# 空速校准
备注
空速传感器 强烈建议使用固定翼和 VTOL 载具。
警告
与大多数其他传感器驱动器不同,空速传感器驱动器不会自动启动。校准前必须 通过相应参数:
- Sensirion SDP3X (SENS_EN_SDP3X)
- TE MS4525 (sens_en_ms4525do)
- TE MS5525 (sens_en_ms5525ds)
- 鹰树空速传感器 (sens_en_etsaspd)
# 执行校准
校准空速传感器:
开始 QGroundControl 并连接载具。
如果尚未启用空速传感器(如 警告 同上)。
选择 齿轮 图标(载具设置),然后点击 传感器 在侧边栏中。
点击 空速 传感器按钮。
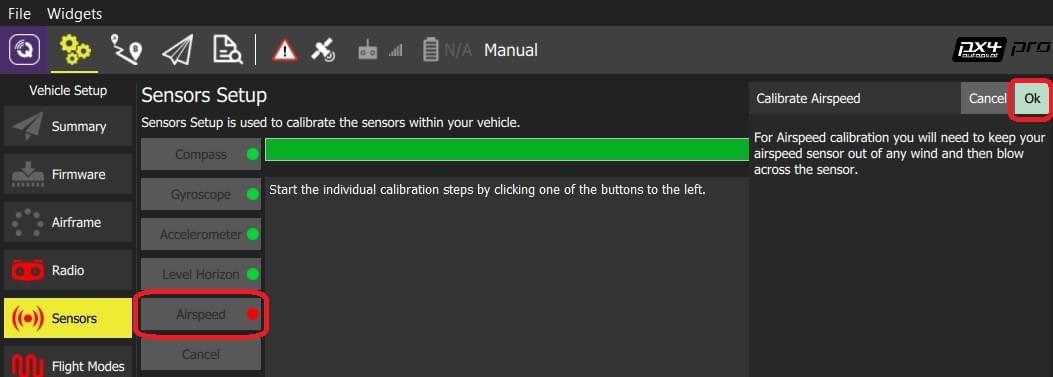
为传感器挡风(即用手握住传感器)。注意不要堵住传感器的任何孔。
点击 好的 开始校准。
一旦提出要求,就对着皮托管顶端吹气,以示校准结束。
TIP
向管内吹气也是检查动态和静态端口安装是否正确的基本方法。如果它们被调换,那么当您向管内吹气时,传感器将读取较大的负压差,校准将因错误而中止。
QGroundControl 然后会告诉您校准是否成功。