# 电池和电源模块设置
本主题介绍如何配置电源设置。
备注
只有在硬件兼容的情况下,才能使用 PX4 的电池监控功能。在大多数情况下,这意味着需要一个电源模块来测量蓄电池电压,也可以测量蓄电池和载具之间的电流。
# 概述
电量设置的目的是对剩余电池的百分比(和容量)进行良好的估算,从而避免载具在使用过程中电量耗尽而撞车(或电池因深度放电而损坏)。
PX4 提供了许多(逐渐有效的)方法,可用于估算容量:
- 电池基本设置 (默认):原始测量电压与空载电压和满载电压之间的范围进行比较。这会导致粗略估计,因为测量电压(及其相应容量)会在负载情况下波动。
- 带负载补偿的电压估计:抵消负载对容量计算的影响。
- 基于电压的电流积分估算:将基于负载补偿电压的可用容量估算与基于电流的已消耗电量估算融合在一起。这样得出的容量估计值与智能电池的容量估计值相当。
后面的方法建立在前面方法的基础上。您使用的方法取决于载具的电源模块是否可以测量电流。
备注
以下说明涉及电池 1 校准参数: BAT1_*.其他电池使用 BATx_* 参数,其中 x 是电池编号。所有电池校准参数 在此列出.
TIP
除了此处讨论的 PX4 配置外,您还应确保电调的低电压切断功能被禁用或设置为低于预期的最低电压。这将确保电池故障安全行为由 PX4 管理,并确保电调不会在电池仍有电量(根据您选择的 "空电池 "设置)时断电。
TIP
电池类型比较 下面将解释主要电池类型之间的区别,以及这对电池设置的影响。
# 基本电池设置(默认)
基本电池设置会将 PX4 配置为使用默认方法估算容量。该方法将测量到的原始电池电压与 "空 "电池和 "满 "电池的电池电压范围(按电池数量缩放)进行比较。
备注
这种方法的估算结果相对粗糙,因为在负载情况下测量电压发生变化时,估算的电荷会出现波动。
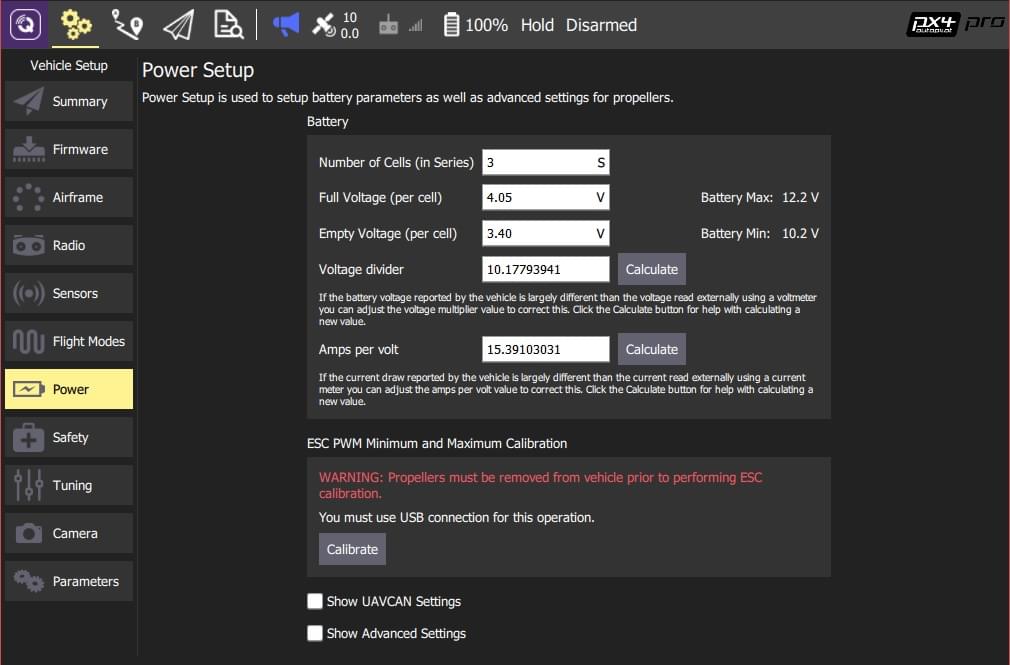
配置电池的基本设置 1:
- 开始 QGroundControl 并连接载具。
- 选择 齿轮 图标(载具设置),然后点击 电源 在侧边栏中。
您将看到描述电池特性的基本设置。下文将解释每个字段的设置值。
备注
编写本报告时 QGroundControl 在此视图中只允许您设置 1 号电池的值。对于有多个电池的载具,您需要直接 设置参数 电池 2 (BAT2_*),如下节所述。
# 电池数量(串联)
设置电池中串联电池的数量。通常情况下,电池上会写一个数字,后面跟 "S"(例如 "3S"、"5S")。
备注
单个电解电池单元上的电压取决于电池类型的化学特性。锂聚合物(LiPo)电池和锂离子电池具有相同的化学特性。 有名无实 电池电压为 3.7V。为了获得更高的电压(更有效地为汽车提供动力),多个电池可连接在一起。 系列.这样,端子上的电池电压就是电池电压的倍数。
如果没有提供电池节数,可以用电池电压除以单节电池的标称电压来计算。下表列出了这些电池的电压与电池之间的关系:
| 细胞 | 锂电池(伏) | 锂离子(V) |
|---|---|---|
| 1S | 3.7 | 3.7 |
| 2S | 7.4 | 7.4 |
| 3S | 11.1 | 11.1 |
| 4S | 14.8 | 14.8 |
| 5S | 18.5 | 18.5 |
| 6S | 22.2 | 22.2 |
备注
该设置对应于 参数: BAT1_N_CELLS 和 BAT2_N_CELLS.
# 全电压(每个电池)
这将设置 有名无实 每个电池的最大电压(电池被认为是满电的最低电压)。
该值应略低于电池的标称最大电池电压,但也不能太低,以免在飞行几分钟后估计容量仍为 100%。
可以使用的适当数值是
- 锂电池: 4.05V(默认情况下 QGroundControl)
- 锂离子电池 4.05V
备注
满电电池的电压在充电后可能会随着时间的推移而略有下降。设置一个略低于最大值的值可以补偿这种下降。
备注
该设置对应于 参数: BAT1_V_CHARGED 和 BAT2_V_CHARGED.
# 空载电压(每个电池)
这将设定每个电池的标称最低安全电压(低于此电压使用可能会损坏电池)。
备注
并没有一个单一的值可以判定蓄电池已经耗尽。如果选择的值过低,电池可能会因深度放电而损坏(和/或载具可能会坠毁)。如果选择的值过高,则可能会不必要地缩短飞行时间。
最低单电池电压的经验法则:
| 级别 | 锂电池(伏) | 锂离子(V) |
|---|---|---|
| 保守值(空载电压) | 3.7 | 3 |
| 实际最低值(负载下/飞行时的电压 | 3.5 | 2.7 |
| 损坏电池(负载下的电压) | 3.0 | 2.5 |
TIP
在保守范围内,电池充电越早越好--电池的寿命会更长,电量损失也会更慢。
备注
该设置对应于 规范: BAT1_V_EMPTY 和 BAT2_V_EMPTY.
# 分压器
如果您的飞行器通过电源模块和飞行控制器的 ADC 测量电压,那么您应该在每块电路板上检查和校准一次测量结果。校准时您需要一个万用表。
校准分频器的最简单方法是使用 QGroundControl 并按照 [设置> 电源设置]https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/power.html)(《QGroundControl 用户指南》)上的步骤进行操作。
备注
该设置与参数相对应: BAT1_V_DIV 和 BAT2_V_DIV.
# 每伏安数
TIP
如果使用的是基本配置(无负载补偿等),则无需进行此设置。
如果您使用 基于电流的负载补偿 或 当前的整合 必须校准每伏安分压器。
校准分频器的最简单方法是使用 QGroundControl 并按照 [设置> 电源设置]https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/power.html)(《QGroundControl 用户指南》)上的步骤进行操作。
备注
该设置与参数相对应: BAT1_A_PER_V 和 BAT2_A_PER_V.
# 带负载补偿的电压估计
备注
有了配置良好的负载补偿,用于估算电池容量的电压就会稳定得多,在上下飞行时变化也会小得多。
负载补偿试图抵消在负载情况下测量电压/估计容量的波动。 基本配置.这种方法的原理是估算出 空载 并使用该电压(而不是测量电压)来估算电池的剩余容量。
备注
要使用负载补偿,您仍然需要设置 基本配置.......。 空电压 (BAT_V_EMPTY)应设置得更高(比无补偿时更高),因为补偿后的电压会被用于估算(通常设置得比使用后空电池时的预期静态电压低一些)。
PX4 支持两种负载补偿方法,可通过以下方式启用 设置 以下两个参数中的任何一个:
- bat1_r_internal - 基于电流的负载补偿 (推荐)。
- bat1_v_load_drop - 基于推力的负载补偿.
# 电流负载补偿(推荐)
这种负载补偿方法依靠电流测量来确定负载。它比 基于推力的负载补偿 但需要有一个电流传感器。
要启用此功能:
设置参数 bat1_r_internal 至电池 1 的内阻(其他电池重复此步骤)。
TIP
有一些锂聚合物电池充电器可以测量电池的内阻。每个电池的典型值为 5mΩ,但这个值会随放电电流等级、电池的年龄和健康状况而变化。
您还应该校准 每伏特分压器的安培数 在基本设置屏幕中。
# 基于推力的负载补偿
这种负载补偿方法是根据马达指令的总推力来估算负载的。
警告
这种方法并不特别精确,因为推力指令和电流之间存在延迟,而且推力与电流也不成正比。使用方法 基于电流的负载补偿 如果您的载具装有电流传感器,则请更换。
要启用此功能:
- 设置参数 bat1_v_load_drop 电池在全油门负载下的电压降。
# 基于电压的估算与电流积分相融合
备注
这是测量相对电池消耗量的最准确方法。如果设置正确,每次启动时都使用健康的新充电电池,那么估算质量将与智能电池相当(理论上可以准确估算剩余飞行时间)。
该方法通过以下方式评估电池剩余容量 融合 这种方法将基于电压的可用容量估算与基于电流的已消耗电量估算相结合。这需要能够精确测量电流的硬件。
要启用此功能:
首先使用 基于电流的负载补偿.
TIP
包括校准 每伏特分压器的安培数 设置。
设置参数 BAT1_CAPACITY 到电池标称容量的 90% 左右(通常印在电池标签上)。
备注
请勿将该值设置过高,否则可能导致估算不准确或估算容量突然下降。
其他信息
通过对测量到的电流进行数学积分,可以估算出一段时间内消耗的电量(这种方法可以提供非常精确的能耗估算)。
系统启动时,PX4 首先使用基于电压的估计值来确定初始电池电量。然后将该估计值与电流积分值融合,以提供综合的更佳估计值。融合结果中每个估计值的相对值取决于电池状态。电池越空,基于电压的估计值就越多。这可以防止电池深度放电(例如,由于电池容量配置错误或起始值错误)。
如果您总是从健康的满电状态开始,这种方法与智能电池使用的方法类似。
备注
电流积分不能单独使用(没有基于电压的估算),因为它无法确定 最初 容量。通过电压估算,您可以估算初始容量,并持续反馈可能出现的错误(例如,如果电池出现故障,或使用不同方法计算出的容量不匹配)。
# 参数迁移说明
PX4 v1.10 版之后增加了对多电池的支持,从而创建了前缀为 BAT1_ 与所有旧参数相对应,前缀为 BAT_.对 BAT_ 和 BAT1_ 目前是同步的:
- 如果旧参数或新参数发生变化,其值将被复制到另一个参数中(它们在两个方向上保持同步)。
- 如果启动时新/旧参数不同,那么旧参数的值就会变成新参数的值。
BAT_参数复制到新的BAT1_参数。
# 电池类型比较
本节将对几种不同类型的电池(尤其是锂聚合物电池和锂离子电池)进行比较概述。
# 概述
- 锂离子电池的能量密度高于锂电池组,但这是以较低的放电率和较高的电池成本为代价的。
- 锂聚合物电池很容易买到,可以承受多旋翼飞机常见的较高放电率。
- 需要根据飞行器和飞行任务做出选择。如果以绝对续航时间为目标,那么使用锂离子电池飞行会有更多好处,但同样需要更加谨慎。因此,应根据飞行的相关因素做出决定。
# 优势
锂电池
- 非常常见
- 尺寸、容量和电压范围广
- 价格低廉
- 与容量相比放电率高(额定 C 值高)
- 更高的收费率
锂离子电池
- 能量密度更高(高达 60)
# 缺点
锂电池
- 低(相对)能量密度
- 供应商众多,质量参差不齐
锂离子电池
- 不常见
- 昂贵得多
- 大尺寸和配置的产品不多
- 所有电池都相对较小,因此较大的电池组由许多电池串联和并联而成,以产生所需的电压和容量。
- 相对于电池尺寸(C 级),放电率更低
- 更难适应需要大电流的载具
- 较低的充电速率(相对于容量)
- 要求在充放电过程中进行更严格的温度监测
- 需要更改电子调速器的设置,以利用最大容量(标准电子调速器低电压设置过高)。
- 在接近空载时,电池电压可能与锂离子电池(使用 6S 电池)相差约 3V。这可能会对推力预期产生影响。
# C 评分
- C 级只是任何类型电池标称容量的倍数。
- C 级与充电和放电速率都相关(且不同)。
- 例如,2000 毫安时电池(不考虑电压)的放电率为 10C,可安全地持续放出 20 安培的电流(2000/1000=2Ah x 10C = 20 安培)。
- C 额定值总是由制造商提供(通常在电池组外部)。虽然它们实际上可以计算出来,但您需要一些信息并测量电池的内阻。
- 锂聚合物电池的 C 值总是高于锂离子电池。这与化学类型有关,但也与每个电池的内阻有关(这与化学类型有关),从而导致锂聚合物电池的放电率更高。
- 遵守制造商关于充电和放电 C 额定值的指导原则对电池的健康和载具的安全运行非常重要(即在充电和放电过程中减少起火、电池组 "膨化 "和其他次优状态)。
# 能量密度
- 能量密度是指相对于电池重量可存储多少能量。通常以每公斤瓦特小时(Wh/Kg)为单位进行测量和比较。
- 瓦特小时的计算方法很简单,就是用标称电压(即不是充满电的电压)乘以容量,例如 3.7v X 5 Ah = 18.5Wh。如果您使用的是 3 节电池组,则电池组存储的能量为 18.5 瓦时 X 3 = 55 瓦时。
- 如果将电池重量考虑在内,就可以用瓦时除以重量来计算能量密度。
- 例如,55 Wh 除以(电池重量(克)除以 1000)。假设该电池重 300 克,则 55/(300/1000)=185 Wh/Kg。
- 对于锂聚合物电池来说,185 Wh/Kg 这个数字已经非常高了。而锂离子电池可以达到 260 Wh/Kg,这意味着每千克电池可以多携带 75 瓦时。
- 如果您知道飞行器飞行时需要多少瓦特(电池电流模块可以告诉您),您就可以在不增加重量的情况下将增加的存储量等同于增加的飞行时间。