# 高度模式(固定翼飞机)


![]()
海拔高度 飞行模式使用户更容易控制飞行器的高度,尤其是达到并保持固定的高度。该模式不会试图逆风保持飞行器航向。
爬升/下降速度由俯仰/升降杆控制。一旦对中,自动驾驶仪就会锁定当前高度,并在偏航/滚动过程中和任何空速下保持该高度。
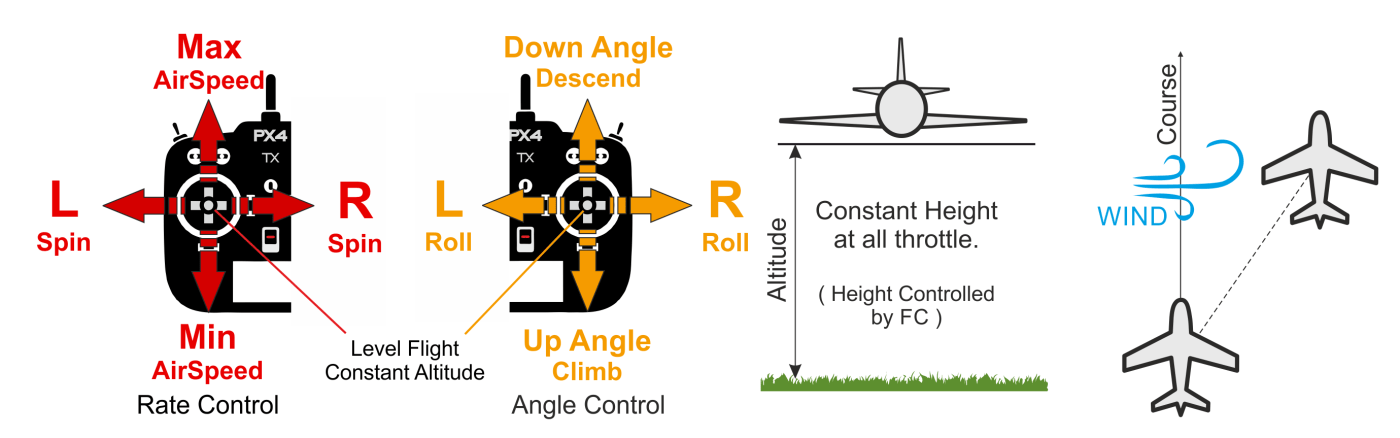
油门输入控制空速。翻滚和俯仰由角度控制(因此不可能翻滚或环绕飞行器)。
当所有遥控输入居中(无滚转、俯仰、偏航,油门约为 50%)时,飞机将恢复直线、水平飞行(受风力影响),并保持当前高度。
下图直观地显示了模式行为(对于一个 模式 2 发射器).
# 技术摘要
遥控/手动模式与稳定模式类似,但具有高度稳定功能(中心摇杆使飞行器平直飞行并保持当前高度)。飞行器的航线不会保持不变,可能会随风漂移。
- 中心滚动/俯仰/偏航输入(在死区内):
- 自动驾驶仪调平载具/机翼并保持高度。
- 如果连接了空速传感器,油门杆可控制飞机的空速。如果没有空速传感器,用户就无法控制油门(在这种情况下,飞行器将以微调油门((FW_THR_TRIM根据爬升或下降的需要增减油门)。
- 外围中心:
- 俯仰杆控制高度。
- 油门杆控制飞机的空速(与中心滚动/俯仰/偏航输入相同)。
- 滚动杆控制滚动角度。自动驾驶仪将保持 协同飞行 (打开新窗口).这与 稳定模式.
- 偏航杆驱动方向舵(信号将添加到自动驾驶仪计算的信号中,以保持 协同飞行 (打开新窗口)).这与 稳定模式.
备注
- 需要手动输入(遥控控制器,或通过 MAVLink 使用游戏手柄/拇指摇杆)。
- 高度通常使用气压计测量,在极端天气条件下可能会变得不准确。装有激光雷达/测距传感器的载具能够更可靠、更准确地控制高度。
# 参数
该模式受以下参数影响:
| 参数 | 说明 |
|---|---|
| FW_AIRSPD_MIN | 最小空速/油门。默认值:10 m/s。 |
| FW_AIRSPD_MAX | 最大空速/油门。默认值:20 m/s。 |
| FW_AIRSPD_TRIM | 巡航速度。默认值:15 m/s。 |
| FW_MAN_P_MAX | 姿态稳定模式下手动控制的最大俯仰角。默认值:45 度。 |
| FW_MAN_R_MAX | 姿态稳定模式下手动控制的最大翻滚角度。默认值:45 度。 |
| FW NPFG 控制 | 保持指令高度和空速所需的滚转/偏航也受 FW NPFG 控制参数的影响。 |