# 手动飞行
本主题介绍了使用飞行器飞行的基本知识。 遥控发射机 在手动或自动驾驶辅助飞行模式下(关于自动飞行,请参阅: 任务).
备注
在您第一次乘坐飞机之前,请阅读我们的 首次飞行指南.
# 上膛载具
在驾驶飞行器之前,必须首先 上膛.这将为所有电机和致动器提供动力;在多旋翼飞行器上,它将启动螺旋桨转动。
为无人机上膛:
备注
VTOL 飞行器只能在多旋翼模式下进行上膛(默认情况下--固定翼模式下的上膛可通过使用 cbrk_vtolarming).
# 起飞
# 多旋翼直升机起飞
多旋翼(和多旋翼模式下的 VTOL)驾驶仪可以起飞 人工 方法是启用任何手动模式,启动飞行器,然后抬起油门杆,直到发动机产生足够的推力离开地面。在 位置模式 (MC) 或 高度模式 (MC) 必须将油门杆增加到 62.5% 以上才能控制爬升率,使飞行器离开地面。超过该值后,所有控制器都将启用,飞行器将进入悬停所需的节流水平(如图所示)。MPC_THR_HOVER).
另外,也可以使用自动起飞装置进行起飞。 起飞模式 (MC).
备注
如果您在上膛后起飞时间过长,载具可能会解除上膛(使用 com_disarm_prflt).
备注
故障探测器 如果起飞时出现问题,发动机将自动停止运转。
# 固定翼飞机起飞
备注
手动起飞(和降落)并不容易!我们建议使用自动模式,尤其是对于缺乏经验的驾驶仪。
稳定模式, Acro 模式 或 手动模式 建议使用手动起飞模式。 位置模式 和 高度模式 但重要的是,飞行器在升空前要充分加速--如果是手动发射,则要有强大的推力;如果是跑道起飞,则要有较长的跑道阶段(这是必要的,因为在这些模式下,控制器可以优先考虑空速,而不是高度跟踪)。
手控飞机手动起飞:
- 启动马达,将载具水平抛出。
- 不要升得太快,否则会导致飞机失速。
- 良好的飞行器修整对于安全的手动发射起飞至关重要,因为如果飞行器飞行不平,在飞行器坠毁之前,驾驶仪只有很短的时间做出反应!
用跑道发射的飞机手动起飞:
- 在跑道上加速,直到速度足以起飞。
- 如果飞机有可操纵的方向盘,则使用偏航杆使其保持航向。
- 一旦速度足够快,就用俯仰杆拉起机头。
在 任务模式 或 起飞模式 (FW).在起飞过程中或起飞后的任何时刻,驾驶仪都可以通过切换到手动飞行模式来接管对飞行器的手动控制。
# 着陆
# 多旋翼飞机着陆
多旋翼飞行器可以在任何手动模式下着陆。确保在着陆后将油门杆向下拉,直到电机关闭。
请注意,载具在着陆时默认会自动解除警报:
- 使用 com_disarm_land 设置着陆后自动撤膛的时间(或完全禁用)。
- 将油门杆置于左下角,手动解除警报。
还可以选择让载具自动着陆。为此,请使用 降落模式 或 返回模式.
备注
如果您发现飞行器在着陆过程中出现抽搐(关闭发动机,然后立即重新启动),这可能是由于发动机性能不佳造成的。 降落检测器配置 (具体地说,是一套不完善的 MPC_THR_HOVER).
# 固定翼飞机着陆
稳定模式, Acro 模式 或 手动模式 和起飞时一样)。在这些模式下,驾驶仪可以完全控制发动机推力,在接近地面时需要进行手动甩尾动作(在不加大油门的情况下抬高机头)。在着陆前,您应在逆风中进行着陆,以降低地面速度。
自动着陆时,应使用 固定翼飞行任务着陆.这种着陆方式是在任务中定义的,可以在以下两种情况中使用 使命 或 返回 模式。
自动 降落模式 除非万不得已,否则不建议使用该模式,因为它无法考虑底层地形。
请注意,载具在着陆时默认会自动解除警报:
- 使用 com_disarm_land 设置着陆后自动撤膛的时间(或完全禁用)。
- 将油门杆置于左下角,手动解除警报。
# 飞行控制/指令
所有飞行,包括起飞和着陆,都由 4 个基本指令控制:翻滚、偏航、俯仰和油门。
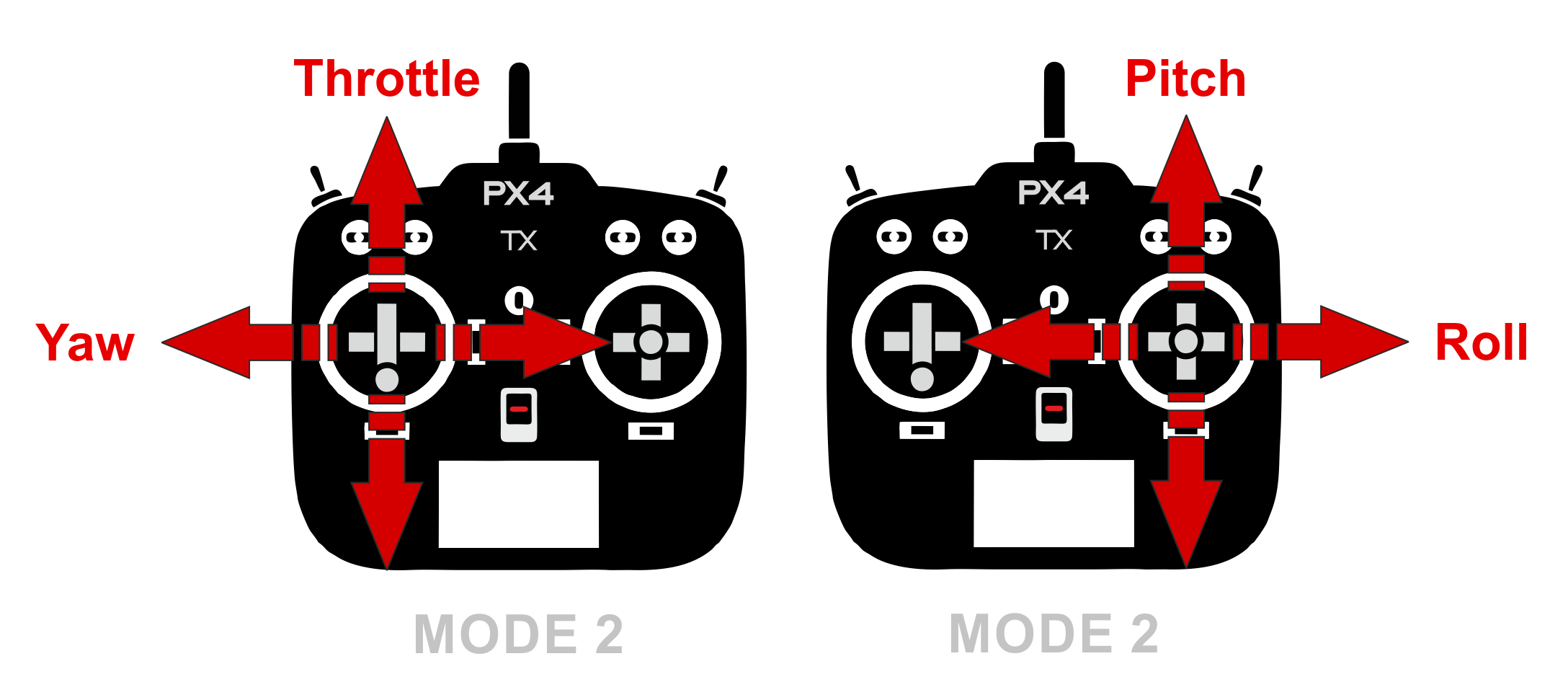
为了控制飞机,您需要了解基本的滚动、俯仰、偏航和油门指令如何影响三轴空间中的运动。这取决于您控制的是飞机等向前飞行的飞行器,还是多旋翼飞行器等悬停飞行器。
# 悬浮飞机
悬停飞机(Copter,悬停模式下的 VTOL)对移动指令的响应如下图所示:
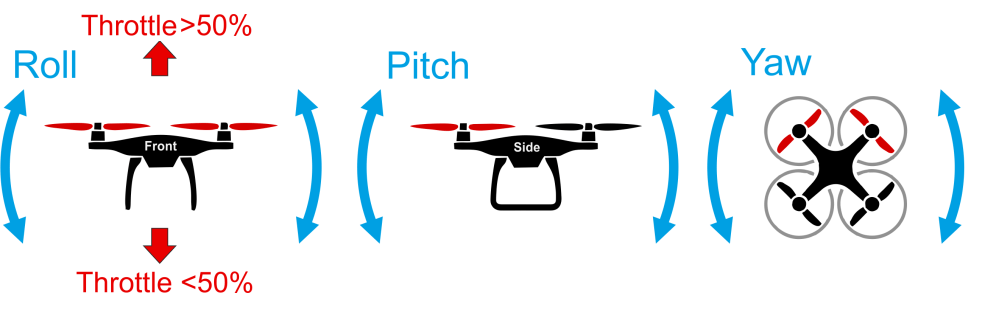
- 间距 => 前进/后退。
- 滚动 => 左/右。
- Yaw => 绕画面中心左/右旋转。
- 油门 => 改变高度/速度。
# 前线飞行器
向前飞行的飞机(飞机、向前飞行的 VTOL)对移动指令的响应如下图所示:
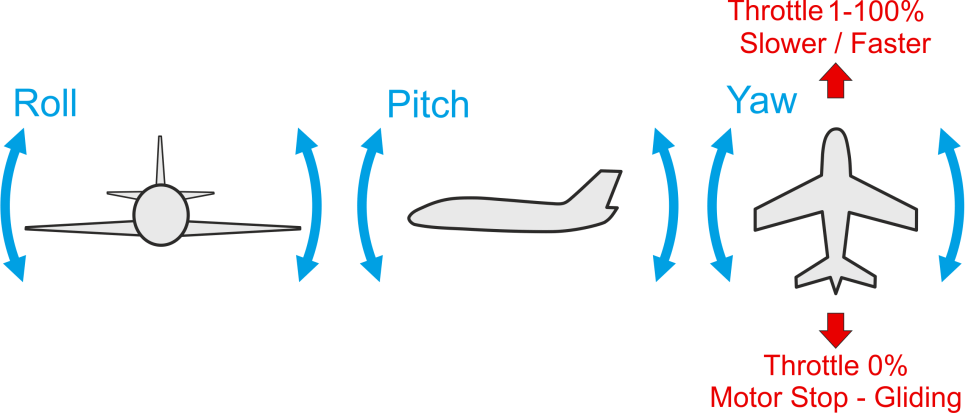
- 间距 => 上/下。
- 滚动 => 左/右和转弯。
- 偏航 => 左右尾部旋转和转弯。
- 油门 => 改变前进速度。
备注
飞机的最佳转弯称为协调转弯,是同时使用滚转和小偏航来完成的。这个动作需要经验!
# 辅助飞行
即使了解了飞行器的控制方式,在全手动模式下飞行也会很不容易。新用户应该 配置发射机 使用自动驾驶仪自动补偿不稳定的用户输入或环境因素的飞行模式。
强烈建议新用户使用以下三种模式:
- 稳定型 - 载具难以翻转,如果松开摇杆(但不能保持位置),则会平移
- 高度 - 爬升和下降均受控于最大速率。
- 位置 - 松开摇杆后,载具将停止(并保持位置,防止风偏)
备注
您还可以通过键盘底部的按钮进入自动模式。 QGroundControl 主飞行屏幕。