# 轨道(多旋翼飞行器)

")
轨道 制导飞行模式允许您指挥多旋翼飞行器(或多旋翼飞行器模式下的 VTOL)在特定位置绕圈飞行,方法是 默认 (打开新窗口) 偏航,使其始终朝向中心。
备注
- 该模式需要一个有效的全球位置估计值(来自 GPS 或从 本地位置).
- 该模式为自动模式,无需用户干预 所需 来控制载具。
- 遥控杆的移动可以控制上升/下降以及轨道速度和方向。
- 可以使用 mav_cmd_doo_orbit (打开新窗口) MAVLink 命令。
# 概述

QGroundControl (或其他兼容的 GCS 或 MAVLink API)为 所需 以启用该模式,并设置轨道的中心位置、初始半径和高度。一旦启用,飞行器将尽可能快地飞到指令圆轨迹上的最近点,并在计划圆上面向中心做顺时针慢速(1 米/秒)轨道飞行。
有关如何启动轨道的说明,请点击此处: FlyView > 轨道位置 (打开新窗口) (QGroundControl 指南)。
备注
使用 RC 控制是 可选的.如果没有 RC 控制,轨道将按上述方式运行。RC 控制不能用于启动模式(如果您通过 RC 切换到模式,它将处于空闲状态)。
RC 控制可用于改变轨道高度、半径、速度和轨道方向:
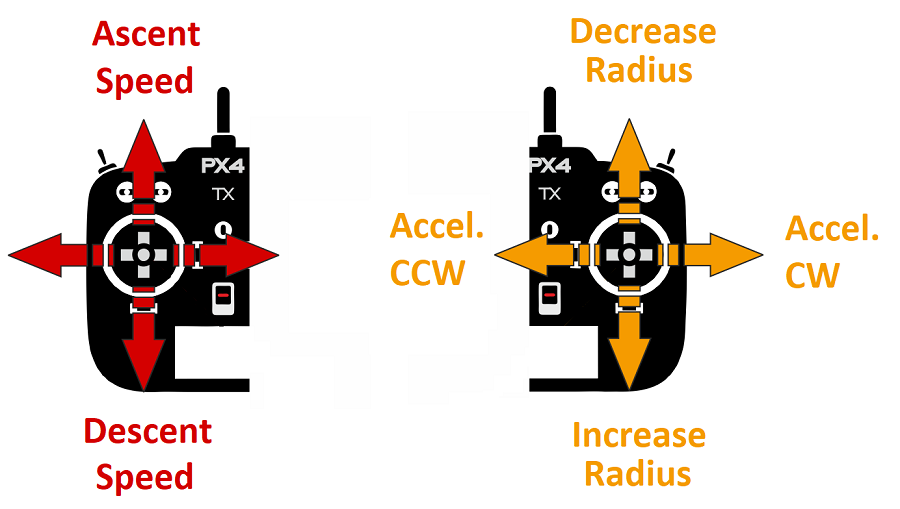
- 左摇杆
- 上/下 控制上升/下降速度,如 位置模式.在中心死区时,高度锁定。
- 左/右 无影响。
- 右摇杆
- 左/右 控制轨道顺时针/逆时针方向的加速度。对中时锁定当前速度。
- 最大速度为 10 米/秒,并进一步限制向心加速度低于 2 米/秒^2。
- 上/下 控制轨道半径(变小/变大)。居中时,当前半径被锁定。
- 最小半径为 1 米。最大半径为 100 米。
- 左/右 控制轨道顺时针/逆时针方向的加速度。对中时锁定当前速度。
下图直观地显示了模式行为(对于一个 模式 2 发射器).
切换到任何其他飞行模式(使用 RC 或 QGC)都可以停止该模式。
# 参数/限制
没有特定于轨道模式的参数。
以下限值为硬编码:
- 初始/默认旋转速度为顺时针方向 1 米/秒。
- 最大加速度限制在 2 m/s^2,优先考虑保持指令圆轨迹,而不是指令地面速度(即如果加速度超过 2m/s^2,飞行器将减速以实现正确的圆轨迹)。
- 最大半径为 100 米。
# MAVLink 信息(开发人员)
轨道模式使用以下 MAVLink 命令:
- mav_cmd_doo_orbit (打开新窗口) - 以指定的中心点、半径、方向、高度、速度和温度启动轨道 偏航方向 (打开新窗口) (飞行器默认面向轨道中心)。
- 轨道执行状态 (打开新窗口) - 在轨道运行期间发出的轨道状态信息,用于更新全球卫星定位系统的当前轨道参数(这些参数可由遥控控制器更改)。