# 跟拍模式(多旋翼飞行器)
")
跟我来 模式允许多旋翼飞行器自主保持相对于另一个系统的位置和高度,该系统使用 跟踪目标 (打开新窗口) MAVLink 信息。
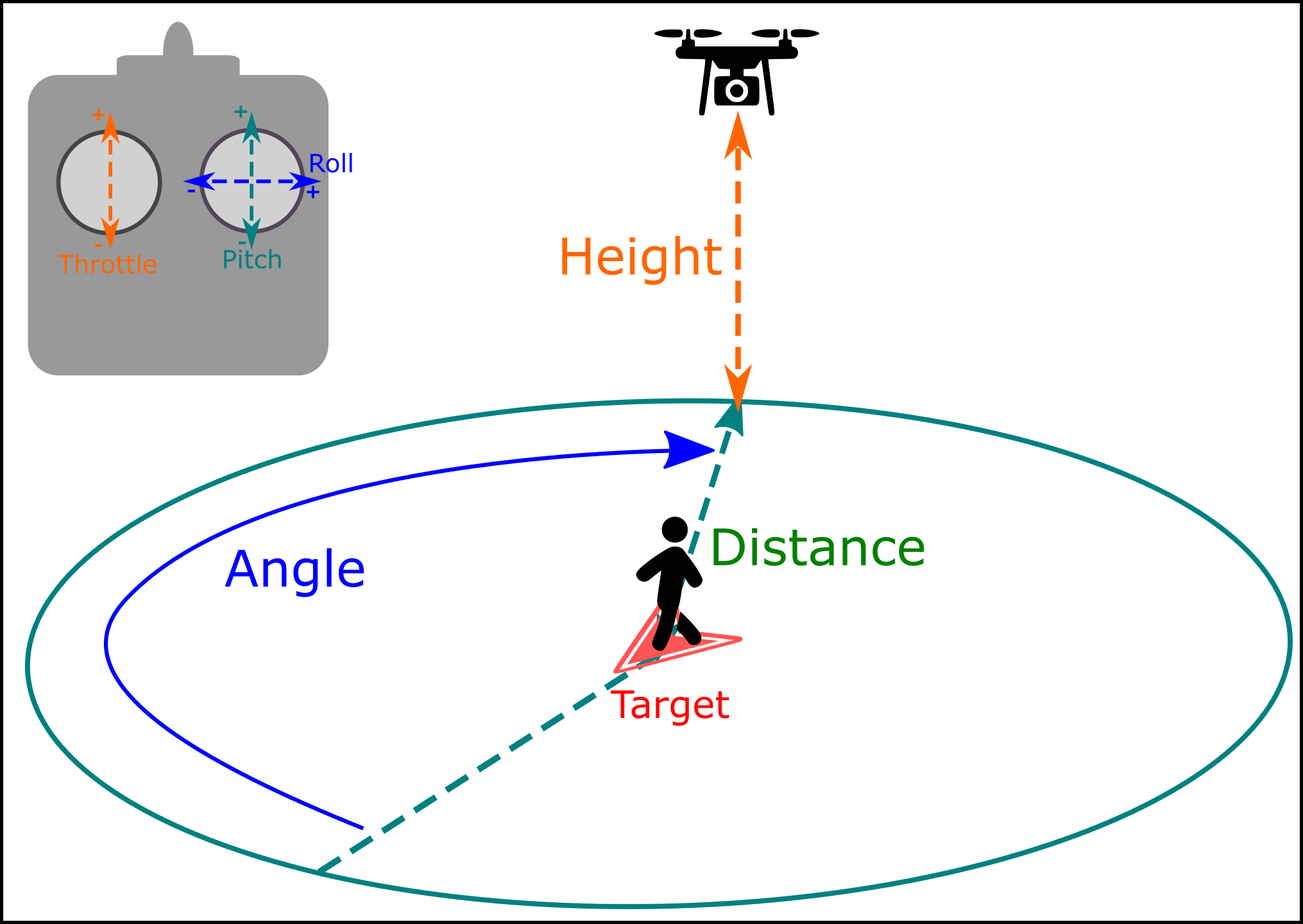
飞行器会自动偏航,从指定的位置面向并跟踪目标。 相对角, 距离 和 高度 和高度,取决于 高度控制模式.
默认情况下,它将从目标正后方 8 米处跟踪,高度高于原点(上膛)8 米。
如上图所示,用户可以使用遥控控制器调节追随角度、高度和距离:
跟随高度 通过
上上下下输入 ("油门")。将操纵杆置于中心位置,使目标保持恒定高度。抬高或降低摇杆以调整高度。跟随距离 通过
前-后输入 ("Pitch")。将操纵杆向前推会增加跟随距离,向后拉则会减少距离。跟踪角度 通过
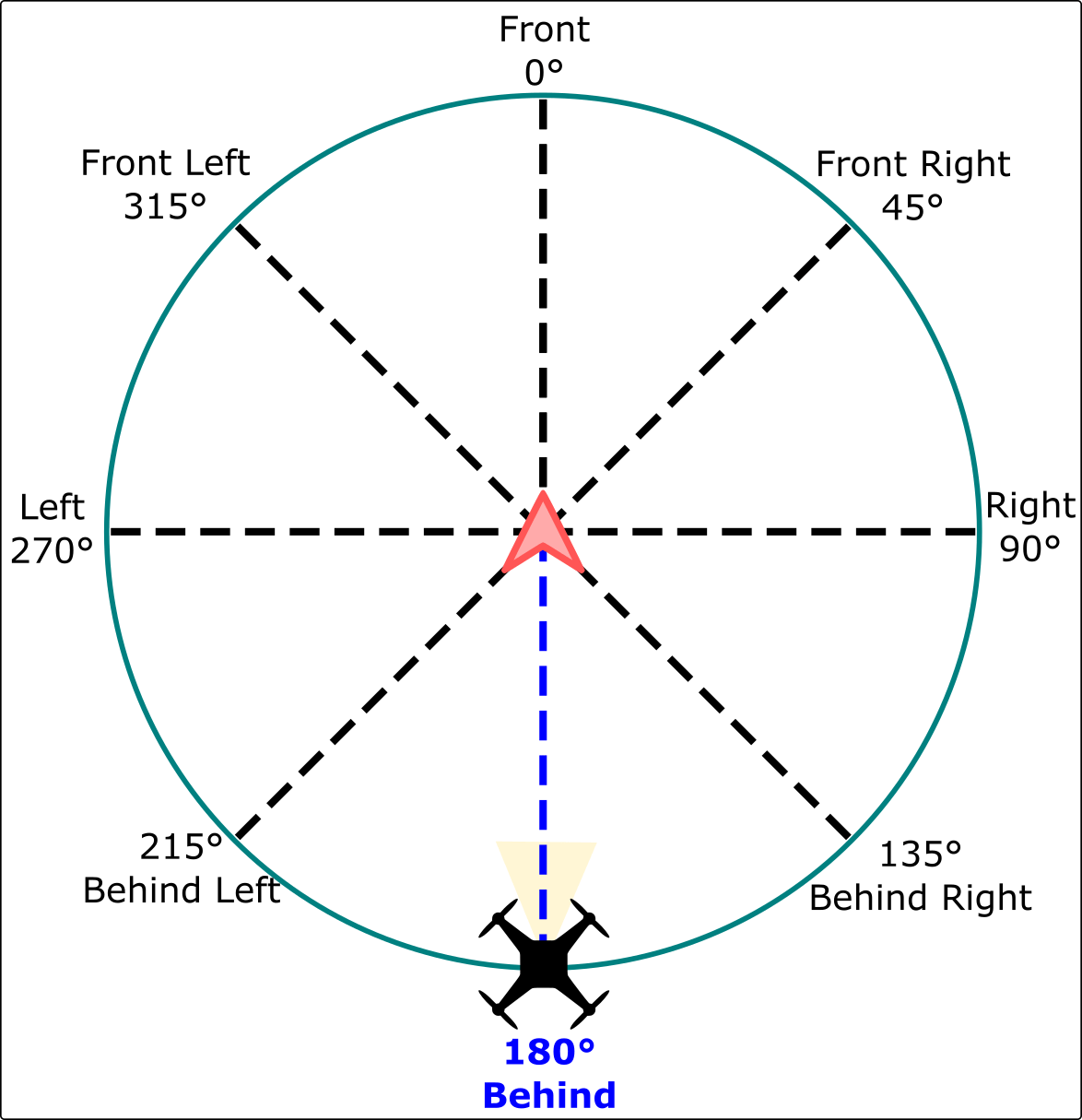
左-右输入("Roll")。移动是从用户的角度进行的,因此如果你面对无人机向左移动摇杆,它就会向你的左边移动。从上方看,如果你向左移动摇杆,无人机将逆时针移动。跟踪角的定义是相对于目标航向(0 度)顺时针方向增大
备注
退出跟随模式后,使用遥控控制器设置的角度、高度和距离值将被丢弃。如果退出 "跟随我走 "模式并再次激活,这些值将重置为默认值。
演示视频:
# 如何使用 "跟我来
支持跟拍模式的设备有 QGroundControl 带 GPS 模块的安卓设备上,以及 MAVSDK.
备注
- 该模式需要 GPS。
- 目前只有多旋翼飞行器支持这种模式。
- 跟踪目标还必须能够提供位置信息。
- QGroundControl 仅在有 GPS 的 Android 设备上支持该模式。
# 安全预防措施
警告
跟踪模式 不执行任何类型的避障功能。使用该模式时必须特别小心。
应遵守以下飞行注意事项:
- 跟踪模式只能在没有树木、电线、房屋等遮挡的开阔区域使用。
- 设置 跟随我的高度 的值远远高于周围的障碍物。通过 默认 这比原点(上膛)位置高出 8 米。
- 它是 更安全 在启用随我飞行模式之前手动飞到安全高度,比在着陆时启用随我飞行模式(尽管该模式实现了自动起飞)更有效。
- 给载具留出足够的停车空间,尤其是在载具快速行驶时。
- 如果出现问题,尤其是第一次使用 "跟拍 "模式时,请随时准备切换回 "定位 "模式。
- 您不能使用遥控杆移动来关闭跟踪模式(因为这会调整属性)。您需要一个可以发送飞行模式开关信号的地面站,或者在遥控发射机中配置一个飞行模式开关。
# 使用 QGroundControl 进行跟拍
跟我来 支持使用 QGroundControl 作为有 GPS 模块的地面站硬件上的目标。推荐的配置是带有两个遥测无线电的 USB OTG 功能安卓设备。
设置 跟我来 模式:
- 将遥测无线电与地面站设备连接,将另一个无线电与载具连接(这样就可以在两个无线电之间传递定位信息)。
- 在安卓设备上禁用睡眠模式:
- 该设置通常可在下面找到: 设置 > 显示.
- 重要的是,您必须将安卓设备设置为不进入睡眠状态,因为这可能会导致 GPS 信号每隔一段时间就停止发射。
- 起飞到至少 2-3 米的高度(即使支持自动起飞,也建议这样做)。
- 将载具放在地面上,按下安全开关并后退至少 10 米。
- 启动载具并起飞。
- 切换到跟踪模式。
- 根据距离传感器的存在情况,直升机将首先上升到距地面或原地 1 米的最低安全高度。
- 它将一直上升到 3 米范围内。 跟高 以避免潜在的碰撞,然后再进行水平移动。
- 直升机会始终调整航向,面向目标
这时,你可以开始移动,无人机就会跟着你。
该模式已在以下安卓设备上进行了测试:
- 银河 S10
- Nexus 7 平板电脑
# 使用 MAVSDK 跟踪我
MAVSDK (打开新窗口) 支持 跟我来 (打开新窗口)这样,您就可以创建一个无人机应用程序,使其成为跟踪我的目标。
欲了解更多信息,请参阅 跟随我的课堂 (打开新窗口) 文件以及 跟随我的榜样 (打开新窗口).
备注
目前不推荐使用 MAVSDK,因为它存在一个错误 (MAVSDK#1756 (打开新窗口) 在这种情况下,同一信息偶尔会被发送两次。这会混淆目标位置和速度估算器。
# 配置
# 高度控制模式

高度控制模式决定了飞行器的高度是相对于原点、地形高度,还是相对于跟踪目标报告的高度。
二维跟踪(默认 高度模式)使无人机在相对于固定原点(起飞高度)的高度上飞行。无人机到目标的相对距离会随着您的上升和下降而改变(在丘陵地形小心使用)。二维 + 地形利用距离传感器提供的信息,使无人机以相对于其下方地形的固定高度飞行。- 如果载具没有距离传感器,则跟车将与
二维跟踪. - 在该模式下飞行时,距离传感器并不总是很准确,载具可能会出现颠簸。
- 请注意,该高度是相对于飞行器下方地面的高度,而不是相对于跟踪目标的高度。无人机可能无法跟踪目标的高度变化!
- 如果载具没有距离传感器,则跟车将与
3D 跟踪该模式可使无人机按照 GPS 传感器提供的相对于跟踪目标的高度进行跟踪。这样就能适应目标高度的变化,比如当你走上山坡时。
警告
不要设置 高度模式 (FLW_TGT_ALT_M)到 3D 跟踪 在使用 Android 版 QGC 时(或者更笼统地说,在没有检查 FOLLOW_TARGET.高度 (打开新窗口) 是 AMSL 值)。
MAVLink 跟踪目标 (打开新窗口) 信息定义期望的是相对于平均海平面 (AMSL) 的高度,而 Android 上的 QGC 发送的是相对于 GPS 椭圆体的高度。两者之间的差异可能高达 200 米!
由于内置的最低安全高度限制(1 米),无人机可能不会坠毁,但它可能会飞得比预期高得多。如果无人机的飞行高度与指定的高度相差很大,则假定地面站的高度输出有误,并使用 2D 跟踪。
# 参数
可以使用以下参数配置跟随我的行为:
| 参数 | 说明 |
|---|---|
| FLW_TGT_HT | 载具跟车高度(米)。请注意,该高度是固定的 相对于原点/上膛位置 (而不是目标载具)。默认和最低高度为 8 米(约 26 英尺) |
| FLW_TGT_DST | 载具与地面站之间的隔离 水平 (x,y) 平面,以米为单位。允许的最小间距为 1 米。默认距离为 8 米(约 26 英尺)。 |
| FLW_TGT_FA | 相对于目标航向的跟踪角,单位为度。如果数值超出 [-180.0, +180.0],它将被自动封装和应用(例如:"......")。 480.0 将转换为 120.0) |
| FLW_TGT_ALT_M | 高度控制模式。 - 0 = 2D 跟踪(高度固定) - 1 = 2D 跟踪 + 地形跟踪 - 2 = 对目标的 GPS 高度进行 3D 跟踪 警告: 请勿与 QGC for Android 一起使用. |
| 最大电平 | 绕目标轨道运动的最大相对速度(米/秒)。 - 事实证明,10 米/秒是攻击性与平稳性的最佳平衡点。 - 将其设置为较高值意味着围绕目标的轨道轨迹会移动得更快,但如果无人机在物理上无法达到这个速度,就会导致攻击行为。 |
| FLW_TGT_RS | 动态过滤算法反应灵敏,可过滤传入的目标位置。 - 0.0 = 对运动非常敏感,对位置、速度和加速度的估算有噪声。- 1.0 = 过滤器非常稳定,但反应不灵敏 |
# 技巧和窍门
设置 跟车距离 超过 12 米(建议最低为 8 米)。
目标与无人机 GPS 传感器之间存在固有的位置偏差(3 至 5 米),这使得无人机会跟踪实际目标附近的 "幽灵目标"。当跟踪距离很小时,这种情况会更加明显。我们建议将跟踪距离设置得足够大,这样 GPS 偏差就不会很明显。
改变追随角度的速度取决于 最大切向速度 设置。
实验表明,数值介于
5 米/秒是10 米/秒通常是合适的。利用遥控调节高度、距离和角度,您可以拍摄出一些富有创意的镜头。
这段视频展示了谷歌地球视角,将高度调整到 50 米左右(高),距离调整到 1 米左右(近)。这样就可以看到卫星拍摄的视角。
# 已知问题
- SiK 915 Mhz 遥测无线电 已知会干扰某些 Android 设备接收的 GPS 信号。在使用跟踪目标模式时,请尽量保持无线电和 Android 设备之间的距离,以避免干扰。
- 安卓版 QGC 报告的高度不正确(等行星以上高度而非 AMSL)。跟踪高度最多可偏差 200 米!