# 带机器人接口板的 AsteRx OEM
Septentrio 是全球领先的 OEM GPS / GNSS 接收器供应商。Septentrio OEM 接收器体积小、重量轻,可为要求苛刻的工业应用提供准确可靠的定位。有多种双天线接收器可供选择,可将 GPS 信息融合到航向中(也可确定其他姿态信息,但 PX4 不会融合)。
AsteRx-i 系列集成的惯性传感器可提供与精确定位同步的全姿态解决方案(航向、俯仰和滚动)。
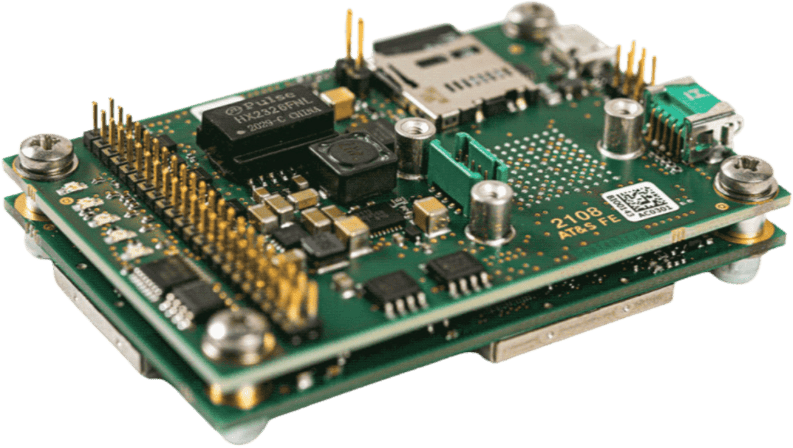
机器人接口板与 Septentrio GNSS 接收机板配合使用,可提供 USB、以太网、板上记录等通用接口以及其他功能,专为快速原型设计、产品评估或高效集成而设计。
# 主要功能
- 信用卡大小的低功耗电路板
- 易于集成到任何系统中
- 同类最佳的 RTK 性能,采用真正的多星座、多频率 GNSS 技术
- 高级干扰缓解 (AIM+) 抗干扰和抗欺骗技术
- 抗振动和冲击
- 用于 Pixhawk 等自动驾驶仪的 44 针 I/O 连接器
- 机载记录
- 微型 USB 接口
- 尺寸:71.53 x 47.5 x 18.15 毫米
- 重量 = 50 克
# 购买
所有 AsteRx 接收器和机器人接口板均可从 Septentrio 网上商店购买:
Septentrio 支持的其他 PX4 设备:
# 接口
# USB
接口类型:微型 USB B 型。
微型 USB B 型连接器可连接电脑,为接收器供电,并通过 USB 端口与接收器通信。
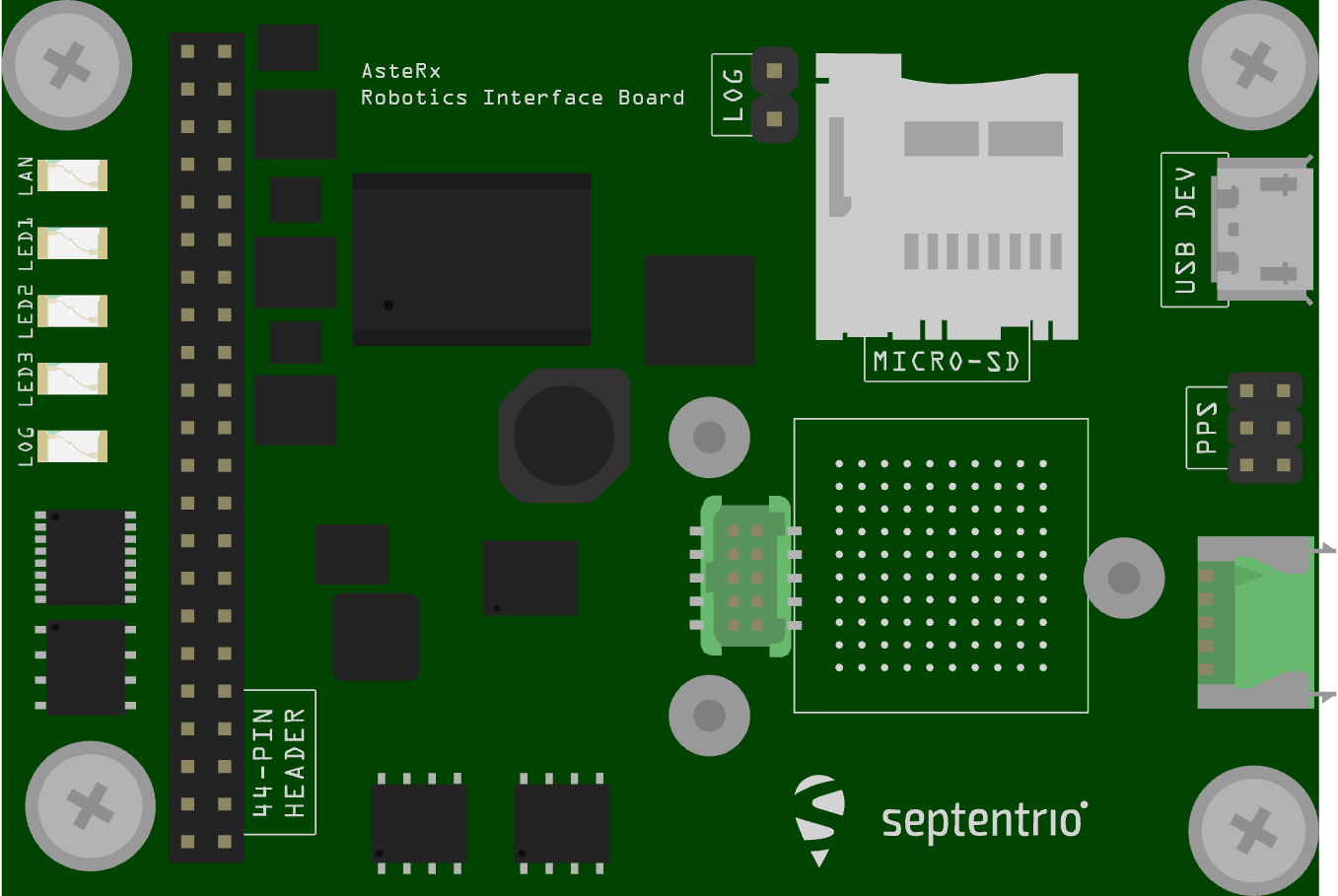
# 44 针接头
连接器类型:SAMTEC TMM-122-03-S-D,2 毫米间距。
44 引脚接头可用于连接多个 GPIO 设备。请参考 硬件手册 (打开新窗口) 了解引脚布局。
# 发光二极管
LED 引脚可用于监控接收器状态。它们可用于驱动外部 LED(最大驱动电流 10mA)。假定相应引脚的电平为高电平时,LED 亮起。通用 LED(GPLED 引脚)通过 setLEDMode 命令进行配置。
# 日志按钮标题
在 "日志按钮 "针座(0.100 英寸垂直针座)上放置跳线就相当于按下 "日志按钮"。接口板负责去抖。
# PPS/Event 标头
连接器类型:SAMTEC TMM-103-03-G-D,2 毫米间距。
微型 USB 连接器旁边的 6 针 2 毫米针座暴露了第一个 PPS 信号。
# 电源选项
当 USB 电缆连接到微型 USB 接口时,接口板通过 USB 接口由计算机供电。或者,也可以通过 44 针连接器的 PWR_IN 引脚供电。从 PWR_IN 引脚供电的电压范围为 4.5V 至 30V。两个电源可同时供电。板载二极管可防止短路。接口板为 AsteRx-m3 OEM 接收器提供 3V3 电源,并为 AsteRx-m3 OEM 的 VANT 引脚提供 5V 直流电压。
# 硬件设置
- 确保接收器电源至少为 3.3V。为此,您可以使用微型 USB 接口或 44 针电缆上的开放式电源(标有 PWR & GND")。
- 将一根或两根 GNSS 天线连接到 AsteRx-i3 D 板的外部天线端口。
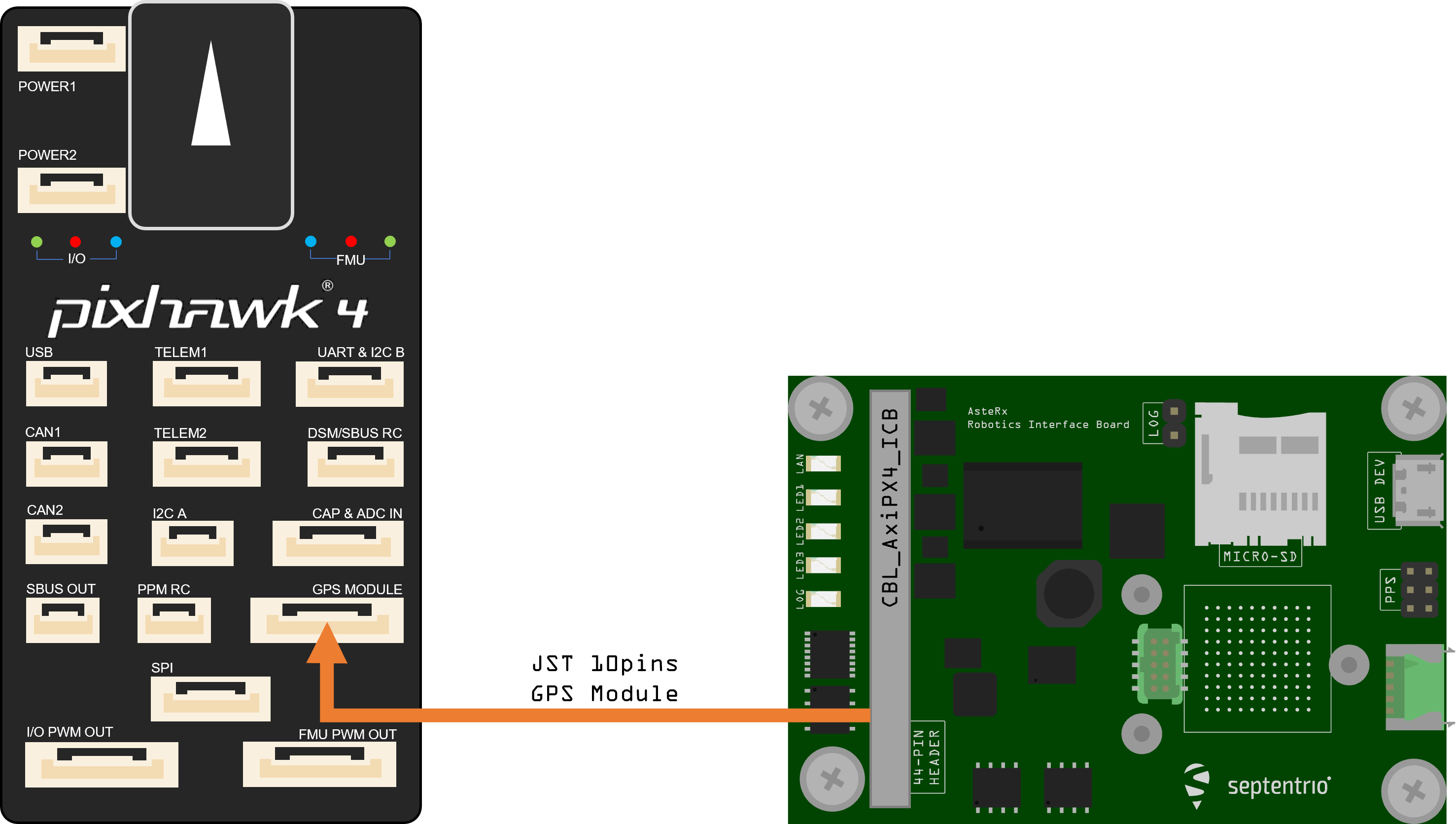
- 将 44 针电缆连接到 RIB 上的 AsteRx-i3 D 板,并将 10 针 JST 连接器连接到
GPS 模块Pixhawk 4 上的端口,如上图所示。 - 在网络界面或使用 "接收机工具",将接收机的波特率设为 115200 管理工具> 专家控制> 控制面板> 通信> COM 端口设置 (这是默认值)。
备注
PX4 将确保自动配置 GNSS 模块。不过,如果您有双天线设置,则需要在网络应用程序中尽可能准确地设置布局。
# 双天线
姿态(航向/俯仰角)可根据主天线和辅助天线 1 之间的基线方向计算得出。

要启用多天线姿态确定功能,请按照以下步骤操作:
- 使用长度大致相同的电缆将两根天线连接到载具上。默认的天线配置如图所示。它包括将天线与载具纵轴对齐,主天线位于 AUX1 后方。为获得最佳精度,请尽量拉大天线之间的距离,并避免天线 ARP 之间出现明显的高度差。
- 在实践中,两个天线 ARP 在飞行器框架中可能并不完全位于同一高度,或者主-副 1 基线可能并不完全平行或垂直于飞行器纵轴。这就导致了计算姿态角的偏移。这些偏差可以用 设置高度偏移 指挥。
备注
为获得最佳航向效果,两根天线之间的距离至少应为 30 厘米/11.8 英寸(理想情况下为 50 厘米/19.7 英寸或以上)。
有关双天线设置的其他配置,请参阅我们的 知识库 (打开新窗口) 或 硬件手册 (打开新窗口)
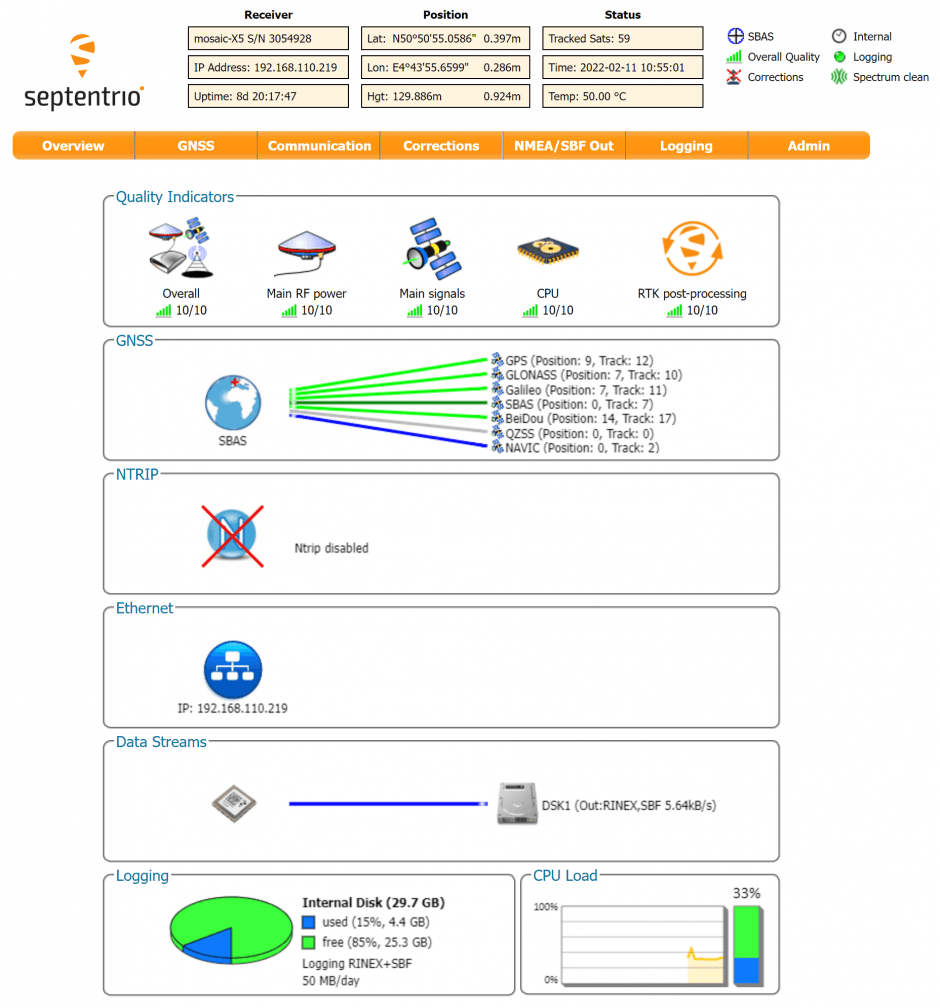
# 网络应用程序
mosaic-H 带航向的 GPS/GNSS 接收机模块的接口、命令和数据信息都有完整的文档记录。附带的 GNSS 接收机控制和分析软件 RxTools (打开新窗口) 可对接收机进行配置、监控以及数据记录和分析。
接收机包括一个直观的网络用户界面,便于操作和监控,让您可以通过任何移动设备或电脑控制接收机。网络界面还采用了易于阅读的质量指示器,是在手头工作期间监控接收机运行的理想选择。
# PX4 设置
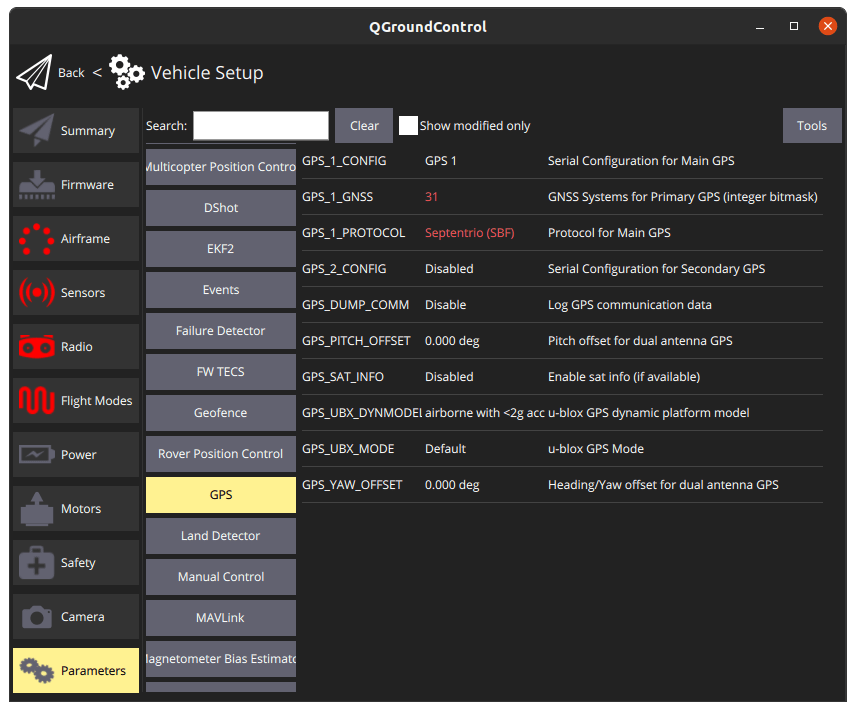
# 单天线
在 GPS 选项卡中编辑以下参数:
- GPS_1_CONFIG:TELEM1
- GPS_1_GNSS:31
- GPS_1_PROTOCOL:自动检测(或 SBF)
- SER_TEL1_BAUD:115200 8N1
转到 工具 > 重启载具
# 双天线
在 GPS 选项卡中编辑以下参数:
- GPS_1_CONFIG:TELEM1
- GPS_1_GNSS:31
- GPS_1_PROTOCOL:自动检测(或 SBF)
- SER_TEL1_BAUD:115200 8N1
- EKF2_GPS_CTRL:第 3 位 双天线航向
- GPS_YAW_OFFSET:根据您的设置进行设置
转到 工具 > 重启载具
TIP
如果您想了解有关 AsteRx 和机器人接口板的更多详细信息,请参阅《AsteRx 与机器人接口板》。 硬件手册 (打开新窗口) 或 Septentrio 支持 (打开新窗口) page.