# 摄像机配置
可以将 PX4 配置为连接物理输出来触发摄像机,也可以将其与 MAVLink 摄像机.
备注
我们建议您使用 MAVLink 摄像机,因为它可以通过以下方式对摄像机进行全面控制 摄像机协议 (打开新窗口).直接连接的摄像机仅支持 一小部分 的 MAVLink 摄像机命令。
每当摄像机被触发时,MAVLink 摄像机触发器 (打开新窗口) 发布的信息包含一个序列号(即当前会话的图像序列号)和相应的时间戳。该时间戳可用于多种应用,包括:为航测和重建照片打上时间戳、同步多相机系统或视觉惯性导航。
相机还可以(选择性地)在使用相机捕捉引脚拍摄照片/帧的准确时刻向 PX4 发送信号。这样就能更精确地将图像映射到 GPS 位置以进行地理标记,或映射到正确的 IMU 样本以进行 VIO 同步等。
# 触发器配置
摄像机触发通常通过 QGroundControl 载具设置 > 摄像头 (打开新窗口) 节。
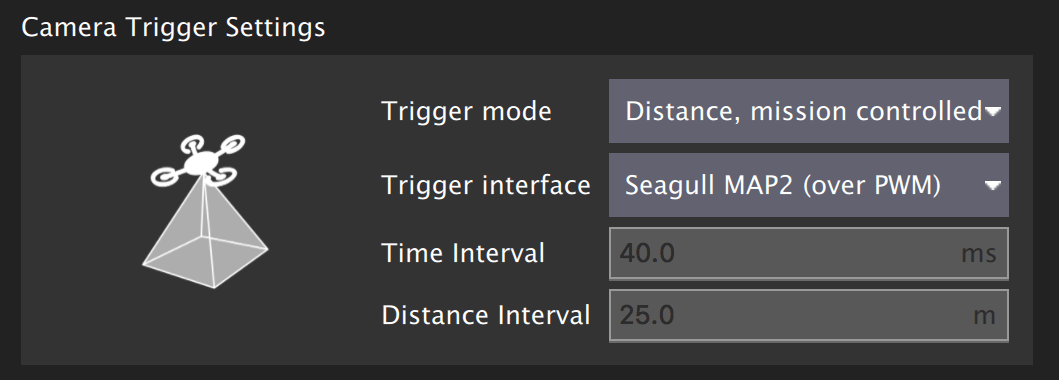
不同的 触发模式, 后端接口 和 触发输出配置 如下所述(也可直接从 参数).
备注
基于 FMUv2 的飞行控制器(如 3DR Pixhawk)默认不提供相机设置部分,因为固件中不会自动包含相机模块。更多信息请参阅 查找/更新参数> 固件中没有的参数.
# 触发模式
支持四种不同的模式,由 TRIG_MODE 参数:
| 模式 | 说明 |
|---|---|
| 0 | 摄像机触发已禁用。 |
| 1 | 工作原理与基本间隔计类似,可通过 MAVLink 命令启用或禁用 mav_cmd_doo_trigger_control.湖泊 命令接口 了解更多详情。 |
| 2 | 持续打开间隔计。 |
| 3 | 根据距离触发。每当超过设定的水平距离,就会进行一次拍摄。不过,两次拍摄之间的最小时间间隔受限于设定的触发间隔。 |
| 4 | 在任务模式下飞行勘测时自动触发。 |
备注
如果您是第一次启用相机触发器应用程序,请记住在更改 TRIG_MODE 参数。
# 触发器接口后端
摄像机触发器驱动程序支持多个后端,每个后端用于特定的应用,由 TRIG_INTERFACE 参数:
| 数量 | 说明 |
|---|---|
| 1 | 启用 GPIO 接口。AUX 输出为高电平或低电平脉冲(取决于 TRIG_POLARITY 参数)每 TRIG_INTERVAL 持续时间这可用于直接触发大多数标准机器视觉相机。请注意,在 PX4FMU 系列硬件(Pixhawk、Pixracer 等)上,AUX 引脚上的信号电平为 3.3v。 |
| 2 | 启用 Seagull MAP2 接口。这样就可以使用 海鸥地图2 (打开新窗口) 以连接多种支持的摄像机。MAP2 的引脚/通道 1(摄像机触发器)和引脚/通道 2(模式选择器)应分别连接到较低和较高的映射位置。 摄像机触发引脚.通过使用 Seagull MAP2,PX4 还支持索尼多端口摄像机(如 QX-1)的自动电源控制和保持在线功能。 |
| 3 | 启用 MAVLink 接口。在该模式下,不使用实际硬件输出。只有 摄像机触发器 自动驾驶仪会发送 MAVLink 信息(默认情况下,如果 MAVLink 应用程序处于 机载 模式。否则,需要启用自定义流)。 |
| 4 | 启用通用 PWM 接口。这样就可以使用 红外线触发器 (打开新窗口) 或伺服系统来触发相机。 |
# 触发器输出引脚配置
相机触发引脚设置在 QGroundControl 致动器 配置屏幕。
触发引脚可通过分配 相机触发器 功能在任何 FMU 输出上。如果使用需要两个引脚的触发器设置(如 Seagull MAP2),则可以分配到任意两个输出端。
但要注意的是,一旦某个输出用于摄像机触发,整个 PWM 组就不能再用于其他用途(例如,不能将该组中的另一个输出用于执行器或电机)。
备注
在编写本报告时,触发功能仅适用于 FMU 引脚:
- 在配有 FMU 和 I/O 板的 Pixhawk 飞行控制器上,FMU 引脚映射到
辅助输出(例如 Pixhawk 4、CUAV v5+)。 - 只有 FMU 的控制器,引脚映射到
MAIN输出(如 Pixhawk 4 mini、CUAV v5 nano)。
# 其他参数
| 参数 | 说明 |
|---|---|
| TRIG_POLARITY | 仅与使用 GPIO 接口时相关。设置触发引脚的极性。高电平有效表示引脚在正常情况下为低电平,触发事件时为高电平。低电平有效则反之。 |
| TRIG_INTERVAL | 以毫秒为单位定义两个连续触发事件之间的时间。 |
| TRIG_ACT_TIME | 以毫秒为单位定义触发引脚在返回中性之前保持激活状态的时间。在 PWM 模式中,最小时间限制为 40 毫秒,以确保在 50Hz PWM 信号中始终保持激活脉冲。 |
有关摄像机触发器模块参数的完整列表可在 参数参考 page.
# 摄像头捕捉
相机还可以(选择性地)使用相机捕捉引脚,在拍摄照片/帧的确切时刻发出信号。这样就能更精确地将图像映射到 GPS 位置以进行地理标记,或映射到正确的 IMU 样本以进行 VIO 同步等。
在 PX4 中,通过设置 cam_cap_fback = 1.然后在 QGroundControl 致动器 通过在配置屏幕上指定 相机捕捉 功能。
备注
在撰写本报告时,摄像头捕捉功能仅适用于 FMU 引脚:
- 在配有 FMU 和 I/O 板的 Pixhawk 飞行控制器上,FMU 引脚映射到
辅助输出(如 Pixhawk 4、CUAV v5+)。 - 只有 FMU 的控制器,引脚映射到
MAIN输出(如 Pixhawk 4 mini、CUAV v5 nano)。
PX4 可检测相机捕捉引脚上具有适当电压电平的上升沿(对于 Pixhawk 飞行控制器,通常为 3.3V)。如果摄像头没有输出适当的电压,则需要额外的电路使信号兼容。
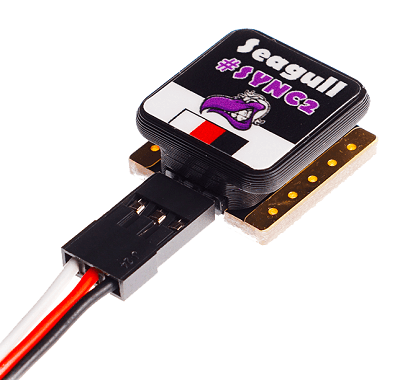
有热靴接口(用于连接闪光灯)的相机通常可以通过热靴适配器进行连接。例如 海鸥 #SYNC2 通用相机热靴适配器 (打开新窗口) 是一个光耦合器,用于将闪光灯电压与 Pixhawk 电压解耦和转换。它可滑入相机顶部的闪光灯插槽。红线和黑线输出端连接到伺服轨/地线,白线连接到输入捕捉引脚。
备注
PX4 发射 MAVLink 摄像机触发器 (打开新窗口) 信息。如果配置了摄像机捕捉,则使用摄像机捕捉驱动程序的时间戳,否则使用触发时间戳。
# MAVLink 命令接口(直接连接的摄像机)
在使用本文档中描述的连接到飞行控制器的相机时(例如使用 GPIO、PWM 或海鸥后端接口),相机驱动程序支持以下 MAVLink 命令子集:
mav_cmd_doo_trigger_control (打开新窗口) - 在命令控制模式下接受 (TRIG_MODE 1).
| 命令参数 | 说明 |
|---|---|
| 参数 1 | 启用/禁用触发器。 1:启用(启动)、 0:禁用。 |
| 参数 #2 | 重置触发顺序。 1:重置,任何其他值都不起作用。 |
| 参数 #3 | 暂停触发,但不关闭或收回相机。 1暂停、 0重新启动。 |
mav_cmd_doo_digicam_control (打开新窗口) - 接受所有模式。
GCS 使用它从用户界面对摄像机进行试拍。触发器驱动程序不支持 MAVLink 规范定义的所有摄像机控制参数。
| 命令参数 | 说明 |
|---|---|
| 参数 #5 | 触发单帧命令(设为 1 时触发单帧图像)。 |
mav_cmd_doo_set_cam_trigg_dist (打开新窗口) - 在 "任务受控 "模式下接受 (TRIG_MODE 4)
该命令在执行任务期间自动生成,以根据全球卫星定位系统的勘测任务触发照相机。
mav_cmd_oblique_survey (打开新窗口) - 任务指令,用于设置摄像机自动安装旋转斜测。
接受 参数1 至 参数4 如 MAVLink 信息定义中所述。快门积分设置 (参数2) 仅适用于 GPIO 后端。
# MAVLink 摄像机
PX4 也可以配置为使用 MAVLink 触发器接口后台 配有 MAVLink 摄像机。
在这种情况下,MAVLink 摄像机信息会被转发到 MAVLink 摄像机进行处理(尽管 PX4 仍会发出 摄像机触发器 当收到触发命令时)。
建议使用 MAVLink 摄像机,因为直接连接的摄像机仅支持 一小部分 的可用 MAVLink 摄像机信息和命令。MAVLink 摄像机可通过使用 MAVLink 摄像机协议 (打开新窗口).
# 测试触发器功能
警告
以下部分已经过时,需要重新测试。
在 PX4 控制台上:
摄像机触发器测试来自 QGroundControl:
点击 触发相机 在主仪表板上。这些镜头不会被记录或计入地理标记。
# 索尼 QX-1 示例(摄影测量)

在本示例中,我们将使用海鸥 MAP2 触发器电缆连接索尼 QX-1,并在执行完全自主的勘测任务后使用该设置创建正射影像图。
# 触发器设置
建议的相机设置为
触发接口=2(海鸥 MAP2)。TRIG_MODE=4(任务受控)。- 其余参数保持默认值。
您需要将 Seagull MAP2 连接到自动驾驶仪上的 FMU 引脚。MAP2 电缆的另一端将连接到 QX-1 的 "MULTI" 端口。
# 摄像机配置
在这个例子中,我们使用的是配备 16-50mm f3.5-5.6 镜头的索尼 QX-1。
为避免触发相机时出现自动对焦和测光延迟,应遵循以下指导原则:
- 手动对焦至无限远
- 将相机设置为连拍模式
- 手动设置曝光和光圈
- ISO 设置应尽可能低
- 适合场景的手动白平衡
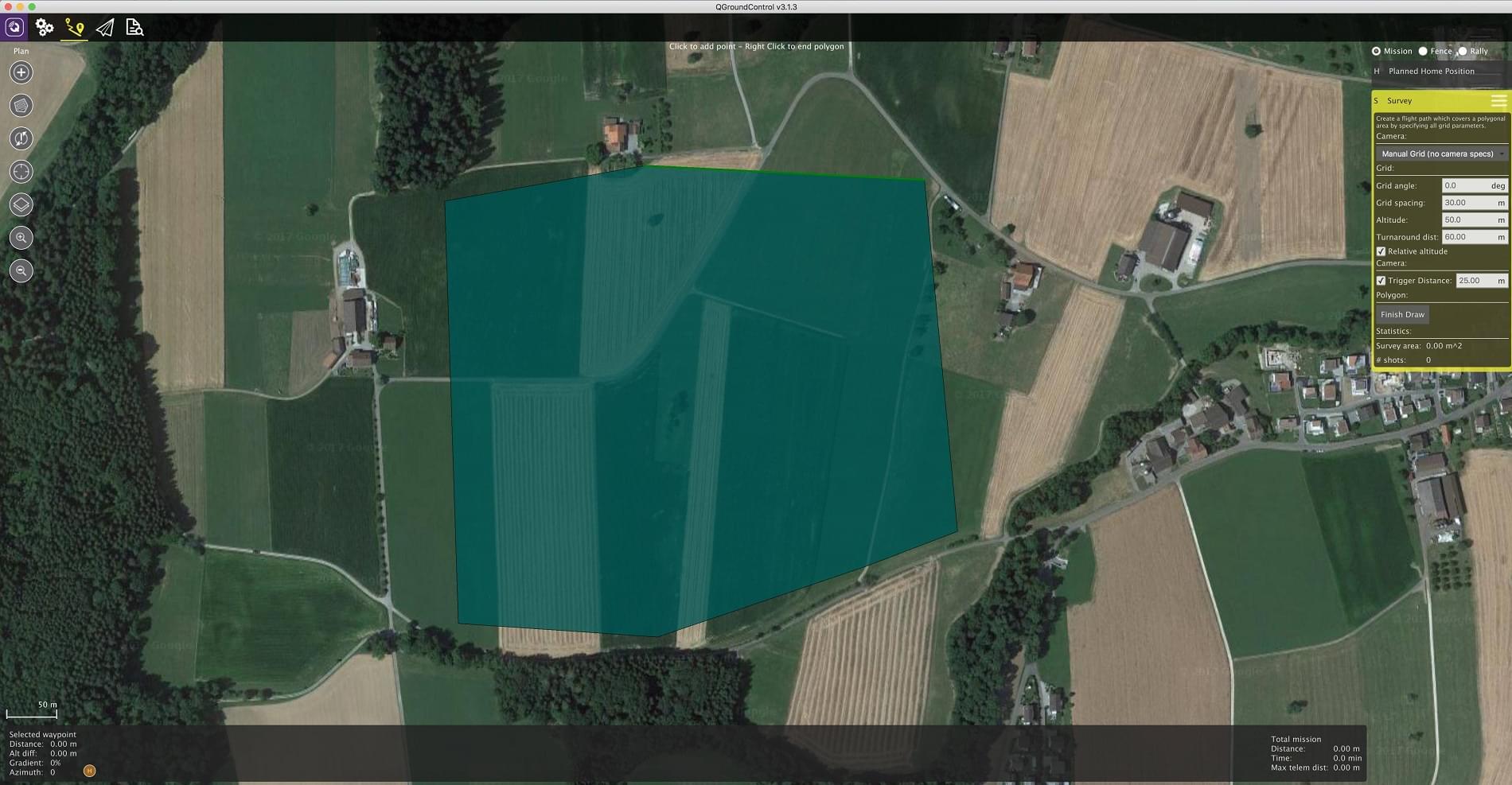
# 任务规划

# 地理标记
下载/复制飞行日志文件和图像,并将 QGroundControl 指向它们。然后点击 开始标记.
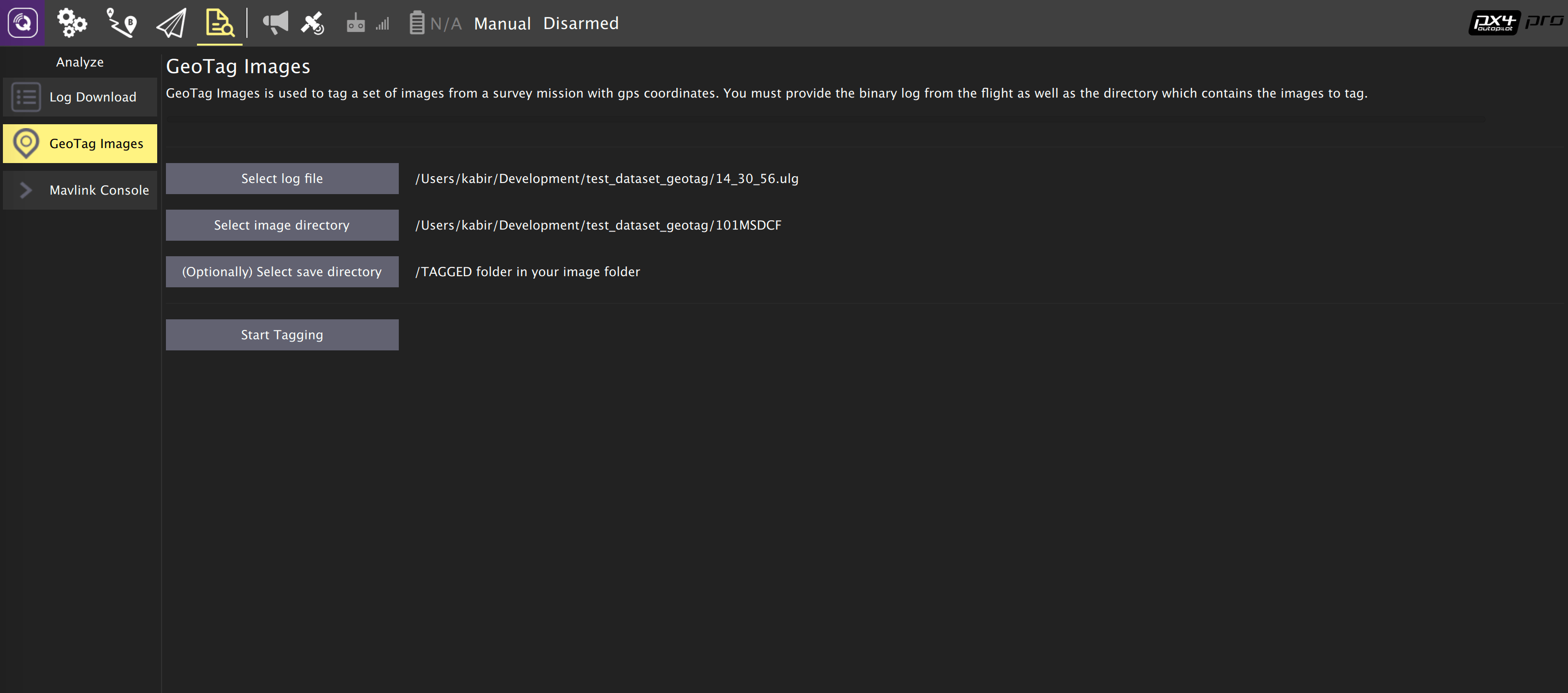
您可以使用免费在线服务(如 Pic2Map (打开新窗口).请注意,Pic2Map 仅限于 40 幅图像。
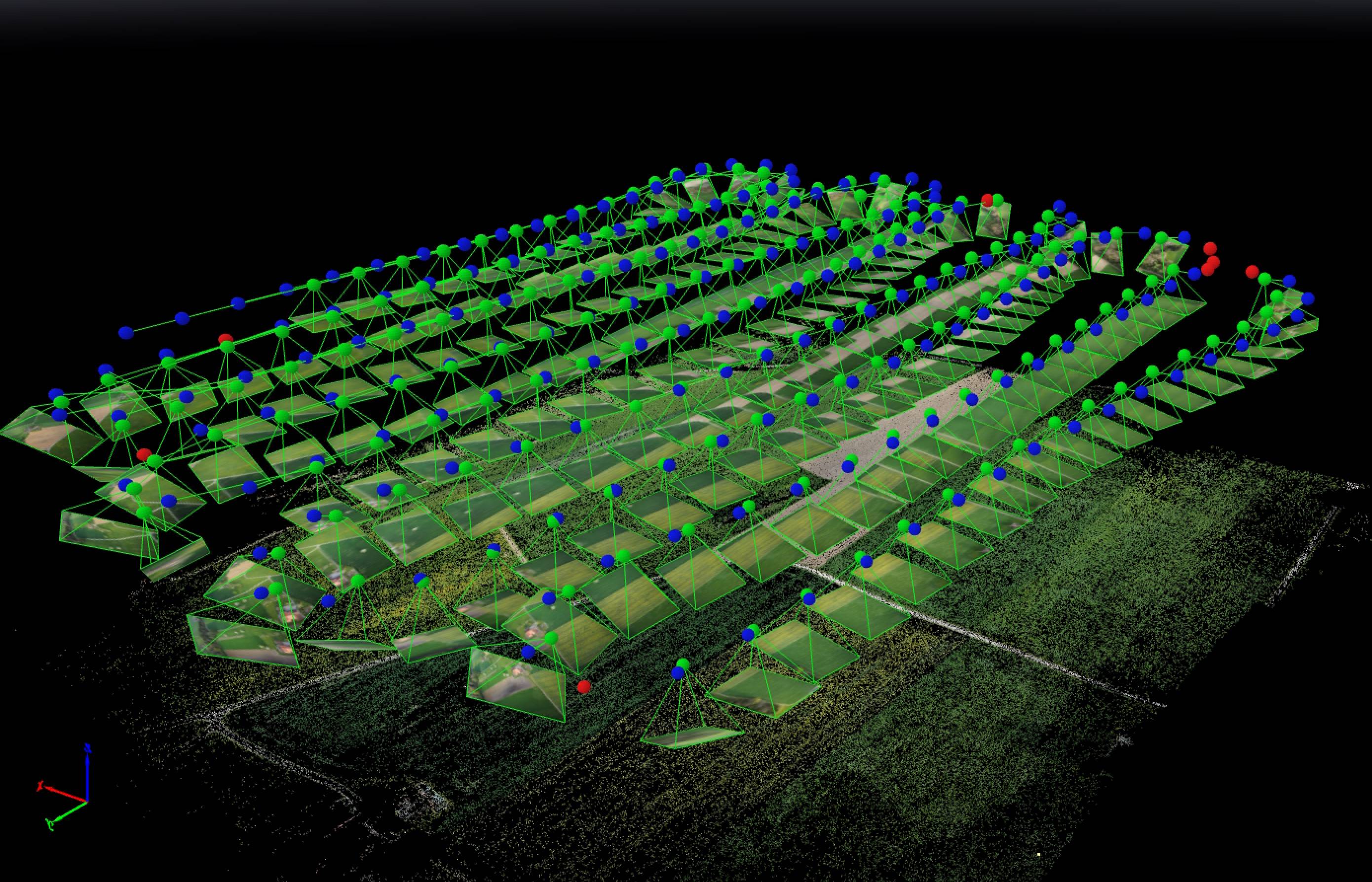
# 重建
我们使用 Pix4D (打开新窗口) 进行三轴重建。
# 摄像机-IMU 同步示例(VIO)
在本示例中,我们将介绍将 IMU 测量与视觉数据同步,以建立立体视觉惯性导航系统 (VINS) 的基础知识。需要说明的是,这里的想法并不是要在我们拍照的同时进行 IMU 测量,而是要对我们的图像进行正确的时间标记,以便为我们的 VIO 算法提供准确的数据。
自动驾驶仪和飞行伴侣的时钟基准不同(自动驾驶仪为开机时间,飞行伴侣为 UNIX 时间),因此我们不对任一时钟进行倾斜,而是直接观察时钟之间的时间偏移。这个偏移量会从 MAVLink 信息中的时间戳(例如 HIGHRES_IMU)中的跨中间件翻译组件(如 MAVROS 的伴生和 接收器 在 PX4 中)。实际的同步算法是网络时间协议(NTP)算法的改进版,使用指数移动平均来平滑跟踪的时间偏移。如果 MAVROS 使用高带宽机载链路(MAVLink 模式),则会自动进行同步。 机载).
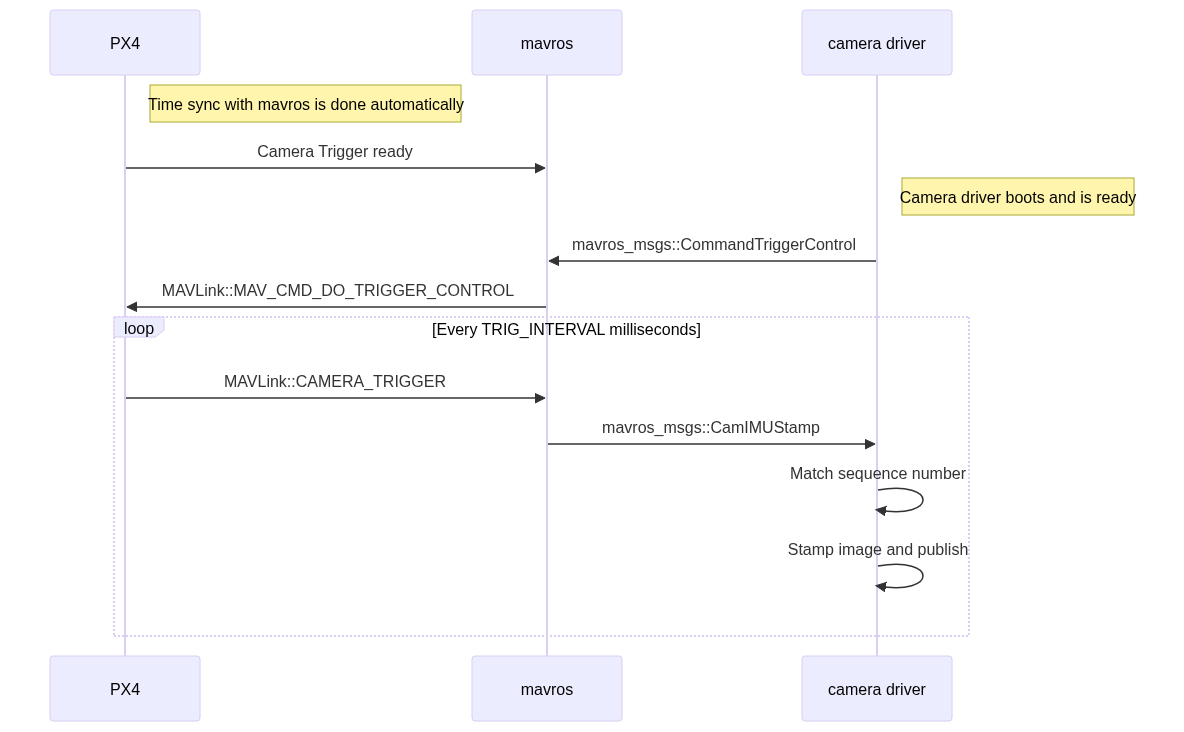
为了获取同步图像帧和惯性测量值,我们将两台相机的触发输入连接到自动驾驶仪的 GPIO 引脚上。从曝光开始的惯性测量时间戳和图像序列号会被记录下来,并发送到配套的计算机上("GPIO")。摄像机触发器 消息),它将缓冲这些数据包和从摄像机获取的图像帧。匹配的依据是序列号(第一个图像帧为序列 0)、图像的时间戳(时间戳来自于 摄像机触发器 信息),然后发布。
下图说明了为正确给图像加上时间戳而必须发生的一系列事件。
# 步骤 1
首先,将 TRIG_MODE 设置为 1,使驱动程序等待启动命令,然后重启 FCU 以获取其余参数。
# 步骤 2
在本示例中,我们将配置触发器与以 30 FPS 运行的 Point Grey Firefly MV 摄像机配合使用。
TRIG_INTERVAL:33.33 毫秒TRIG_POLARITY:0(低电平有效)TRIG_ACT_TIME:0.5 毫秒。手册中规定至少为 1 微秒。TRIG_MODE:1,因为我们希望相机驱动程序在开始触发前就做好接收图像的准备。这对于正确处理序列号至关重要。
# 步骤 3
通过将接地和信号引脚连接到适当位置,将摄像头连接到 AUX 端口。
# 步骤 4
您必须按照上述序列图修改驱动程序。的公共参考实现 IDS 成像 UEye (打开新窗口) 照相机和 符合 IEEE1394 标准 (打开新窗口) 可提供照相机。