# 夹具
夹持器是一种机械装置,可与无人飞行器集成,用于夹持(固定)和释放有效载荷。
PX4 允许在以下情况下自动触发机械手 有效载荷运送任务 或手动 使用操纵杆.

备注
机械手可以配置为 通用遥控或 MAVLink 驱动器.通用推杆不能与操纵杆或有效载荷任务一起使用,但可以与遥控控制器一起使用。
# 支持夹具
有许多不同的机械手机制(夹钳、手指、电磁铁)和接口(PWM、CAN、MAVLink 等)。
PX4 支持具有简单的保持和释放触发器并使用以下接口的机械手(详见链接文档):
- PWM 伺服机械手 - 与自动驾驶仪 PWM 输出相连的机械手
- MAVLink 抓取器 (未经测试) - 支持以下功能的夹具 mav_cmd_doo_gripper (打开新窗口) MAVLink 命令。
# 使用夹具
有关在任务中使用机械手的信息,请参阅 有效载荷运送任务.
您可以通过操纵杆按钮手动触发机械手,如果您已经映射了 夹具打开 和 夹具关闭 中的按钮 QGC 操纵杆配置.请注意,如果按下 抓住 按钮,它将自动终止释放行为并返回到关闭位置,从而有效取消释放指令。如果在任务中当释放正在实际进行时执行此操作,则 交货将被取消.
手动触发机械手从 遥控控制 不支持开关。
MAVLink 应用程序(如地面站)也可使用 mav_cmd_doo_gripper (打开新窗口) MAVLink 命令。
# PX4 配置
# 包裹投递配置
PX4 抓手支持与包裹交付功能相关,必须启用和配置该功能才能使用抓手。
- 设置 PD_GRIPPER_EN 参数为 1(更改后需要重启)。
- 设置 pd_gripper_type 以匹配您的机械手。例如,设置为
伺服为 伺服机械手.
# 机械手致动器映射
直接连接到飞行控制器的机械手(如 PWM 伺服机械手)必须在飞行过程中映射到特定的输出端。 执行机构配置.
为此,可将 夹具 函数的输出端口。例如,下图将 夹具 到 PWM AUX5 输出端。

有关致动器映射的更多信息,请参阅机械手专用文档。例如,请参阅 机械手伺服> 执行器映射.
# 启用预警报模式
通常情况下,您需要启用 预上膛模式.该模式下电机处于禁用状态,但可以打开和关闭夹具,以便安装有效载荷(避免螺旋桨旋转带来的潜在危险)。
- 设置 com_prearm_mode 至
始终如一.
# 机械手启动超时
对于包裹递送来说,机械手在进入后续航点之前必须有足够的释放时间,这一点非常重要。对于不提供基于传感器的状态反馈的机械手(大部分机械手都不提供),可配置的超时时间用于在机械手释放时发出信号。 应 已打开或关闭。
设置启动超时:
测量夹具打开和关闭所需的时间,并记下这两个时间中较长的时间。
打开和关闭夹具有两种简单的方法。当无人机放在工作台上,螺旋桨被卸下时:
运行
有效载荷发送器QGC 测试 MAVLink 外壳:> 有效载荷发射器抓手测试备注
如果收到类似 "[payload_deliverer] not running" 的错误信息,请重复上述设置步骤。您还可以运行
有效载荷发送器启动命令。使用 操纵杆 来触发抓手的打开和关闭动作。
设置 PD_GRIPPER_TO 与抓手打开和关闭时间中较大的时间相一致。
# 任务交付超时
当运行 有效载荷运送任务 重要的是,在机械手没有报告已经打开(或关闭)的情况下,任务不能停止。如果抓手反馈传感器损坏或 UORB 丢弃了抓手执行器超时信息,就可能出现这种情况。
备注
目前还不支持来自传感器的抓手状态反馈,但将来可能会支持。
任务交付超时提供了额外的保障,如果没有收到机械手的成功启动确认,任务将继续执行。
设置超时:
# QGC 操纵杆配置
QGroundControl 操纵杆 通过该配置,您可以将机械手的操作映射到操纵杆按钮上,然后手动打开和关闭机械手。
在 QGroundControl 中映射操纵杆按钮:
打开菜单: QGC 徽标(左上角)> 载具设置> 操纵杆> 按钮分配 标签。
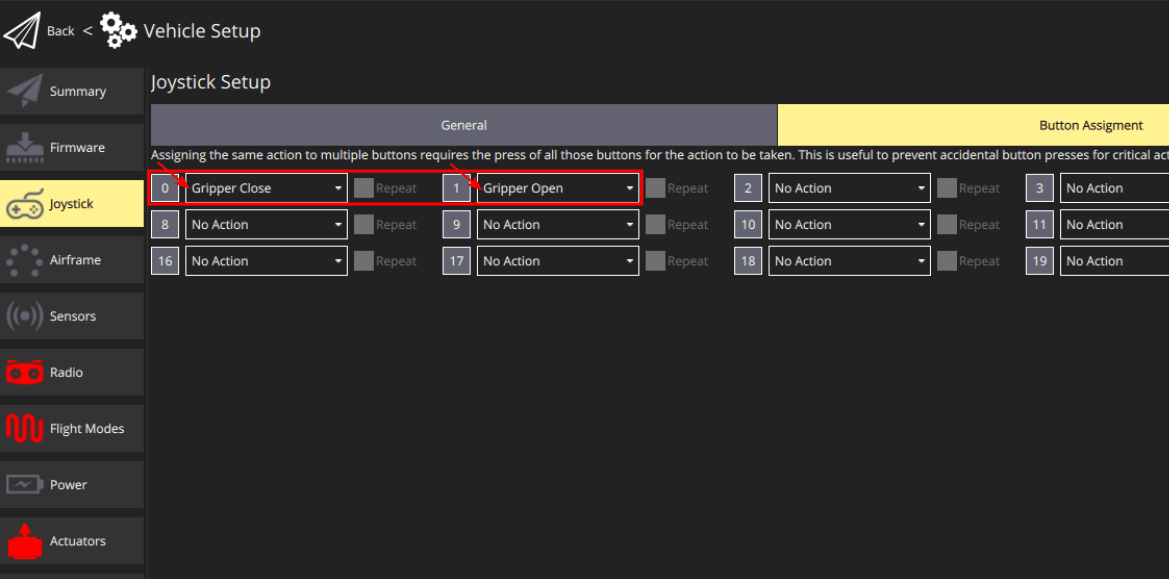
选择
夹具打开和夹具关闭操作所需的操纵杆按钮,如上图所示。
您可以通过点击映射按钮并检查抓手是否移动来测试操作。如果抓手没有按预期移动,请检查包裹传送配置和致动器映射是否设置正确。