# Holybro X500 V2(Pixhawk 5X 构建)
本主题提供了构建 Holybro X500 V2 ARF 套件 (打开新窗口) 并使用 QGroundControl.
ARF(几乎可随时飞行)套件为那些想立即投入无人机开发而又不想在硬件设置上花费太多时间的人提供了最简短、最直接的组装体验。它包括机架、电机、电调、螺旋桨和配电板。
除套件外,您还需要飞行控制器、无线电发射器、GPS 和遥控控制器。ARF 套件可与 PX4 支持的大多数飞行控制器配合使用。
# 关键信息
- 套件: Holybro X500 V2 ARF 套件 (打开新窗口)
- 飞行控制器: Pixhawk 5X
- 组装时间(约): 55 分钟(框架 25 分钟,自动驾驶仪安装/配置 30 分钟)

# 材料清单
圣溪 X500 V2 套件 (打开新窗口) 包括几乎所有必需的组件:
- X500V2 机架套件
- 机身 - 全碳纤维顶盖和底板(144 x 144 毫米,厚 2 毫米)
- 臂 - 高强度 & 超轻 16 毫米碳纤维管
- 起落架 - 16 毫米 & 10 毫米直径碳纤维管
- 平台板 - 带有 GPS 和通用配套计算机的安装孔
- 双通道 10 毫米直径杆 x 250 毫米长导轨安装系统
- 带两条电池带的电池座
- 手动安装工具
- Holybro Motors - 2216 KV880 x6 (打开新窗口)
- Holybro BLHeli S 电调 20A x4 (打开新窗口)
- 螺旋桨 - 1045 x4 (打开新窗口)
- 电源分配板 - XT60 电池插头和;XT30 电调插头和;外围设备
- 相机支架(可选,3D 文件可从以下网站下载 这里 (打开新窗口))
其他部件不包括在 ARF 套件中):
此外,您还需要电池和接收器 (兼容的无线电系统),如果您想手动控制无人机。
# 套件硬件
本节列出了机架和自动驾驶仪安装的所有硬件。
| 项目 | 说明 | 数量 |
|---|---|---|
| 底板 | 碳纤维(2 毫米厚) | 1 |
| 顶板 | 碳纤维(1.5 毫米厚) | 1 |
| 手臂 | 碳纤维管(组装时已安装电机) | 4 |
| 起落架 - 垂直杆 | 碳纤维管 + 工程塑料 | 2 |
| 起落架 - 横杆 | 碳纤维管 + 工程塑料 + 泡沫塑料 | 2 |
| 安装导轨 | 直径:10 毫米 长度:250 毫米 | 2 |
| 电池安装板 | 厚度:2 毫米 | 1 |
| 电池垫 | 3 毫米黑色硅胶片 | 1 |
| 平台板 | 厚度:2 毫米 | 1 |
| 悬挂器 & 橡胶环垫圈 | 内孔直径:10 毫米 黑色 | 8 |
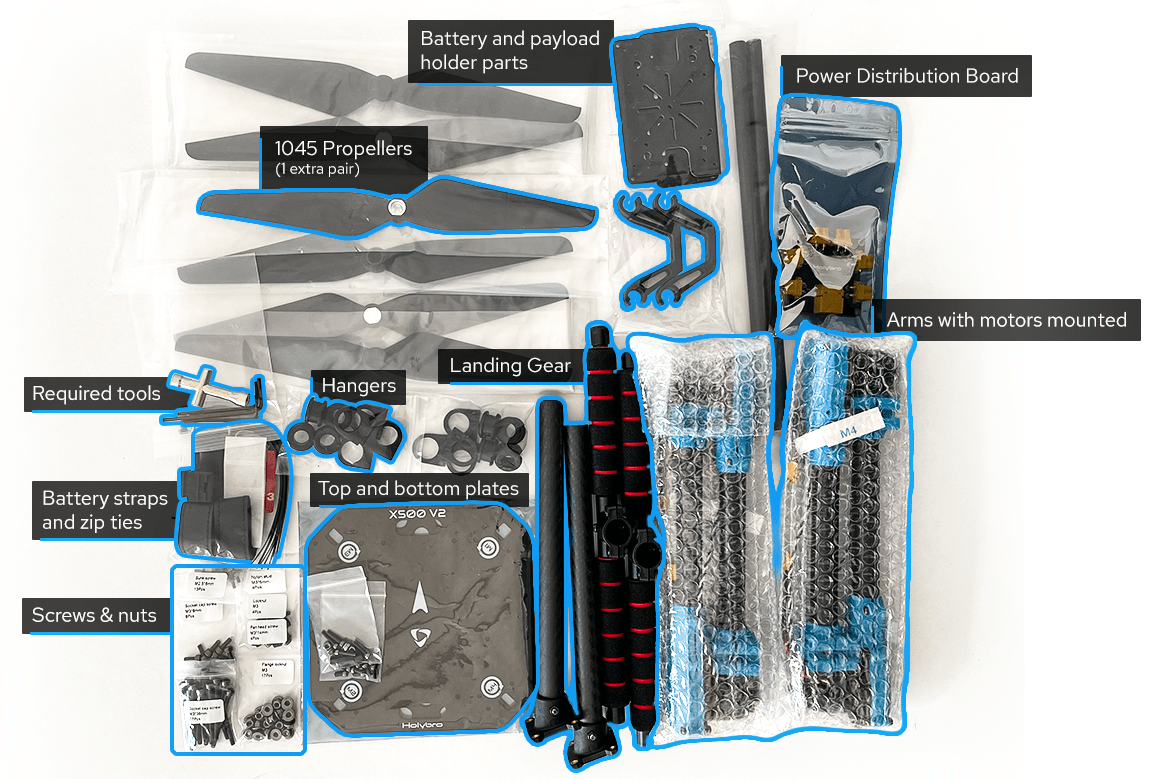
图 1:X500 V2 ARF 套件的内部结构
# 电子产品
| 项目说明 | 数量 |
|---|---|
| Pixhawk5x 和各种电缆 | 1 |
| M8N GPS 模块 | 1 |
| 电源模块 PM02D(带预焊电调电源线) | 1 |
| 电机 2216 KV880(V2 更新版) | 4 |
| Holybro BLHeli S 电调 20A x4 | 1 |
| 433MHz 遥测无线电/915MHz 遥测无线电 | 1 |
# 所需工具
随附组装工具,您可以根据需要使用:
- 剪线钳
- 精密镊子
# 装配
预计组装时间为 55 分钟(框架 25 分钟,自动驾驶仪安装/配置 30 分钟)。
首先组装有效载荷&;电池座。将橡胶推入夹具(切勿使用尖锐物品将其推入!)。然后,将夹具穿过带电池支架底座的支架杆,如图 3 所示。
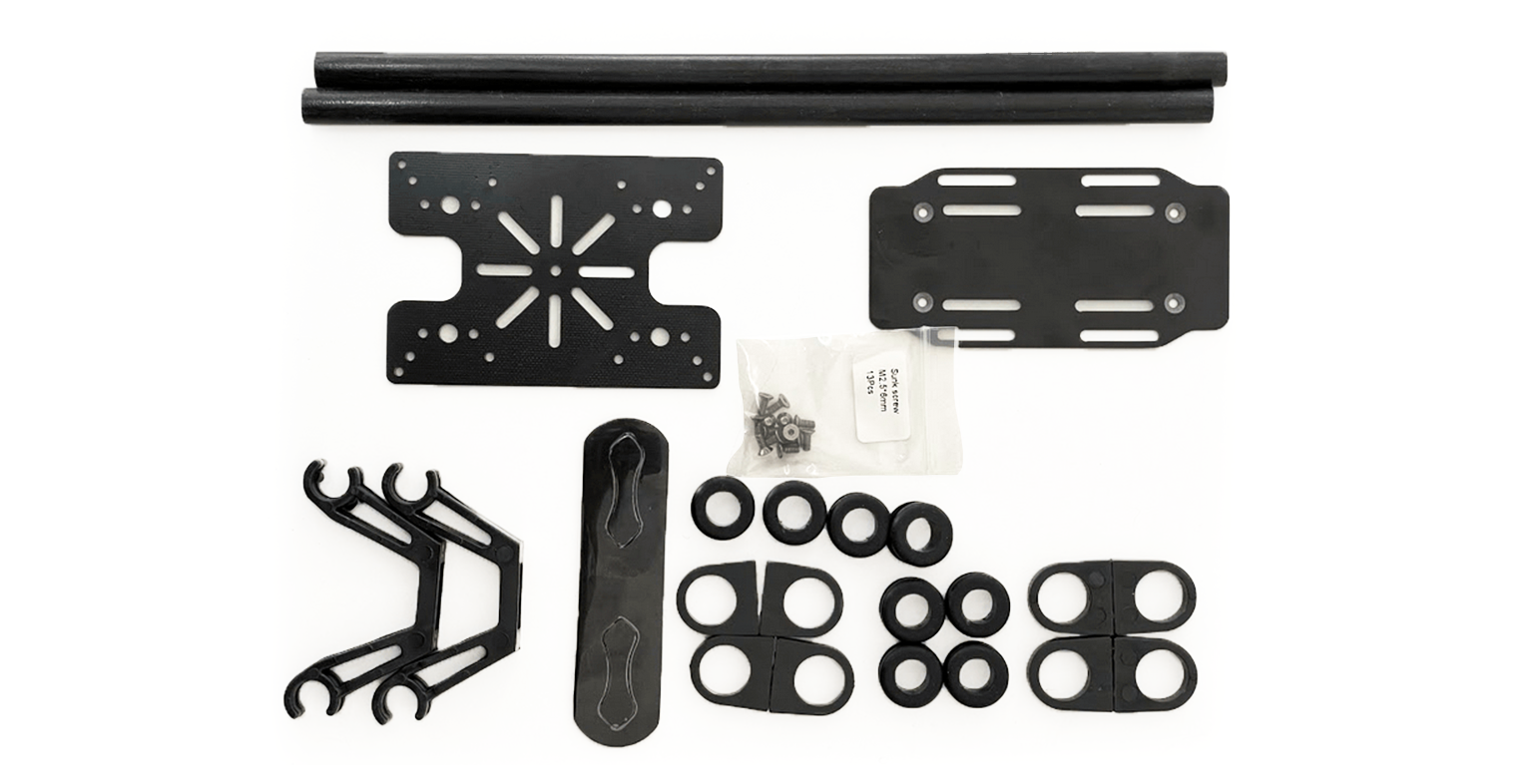
图 2:有效载荷支架组件
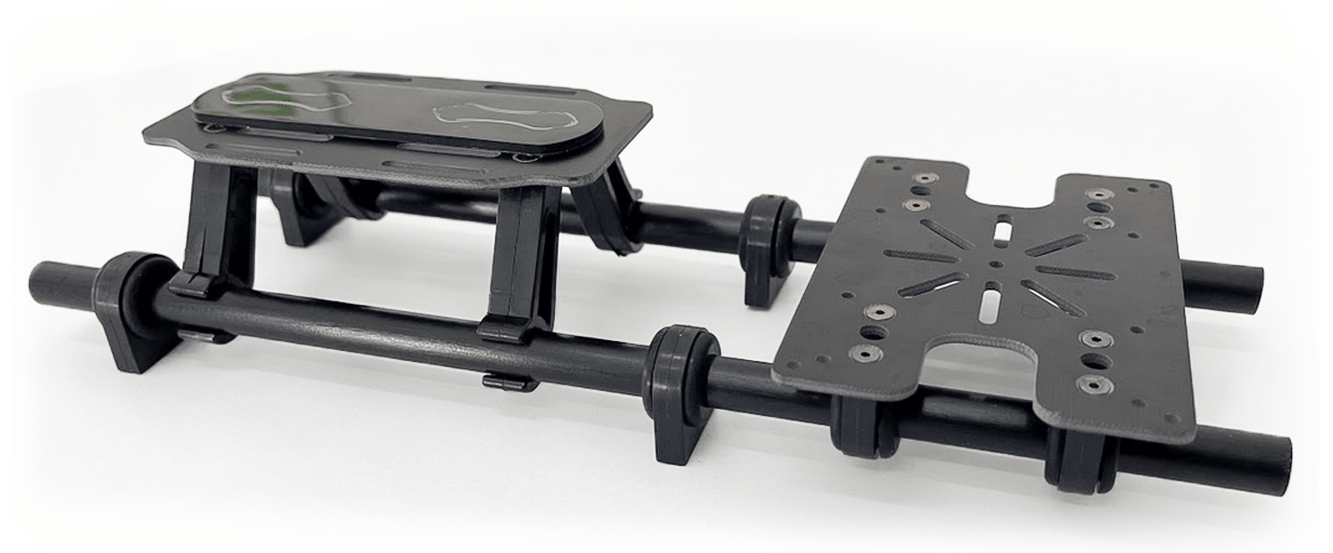
图 3:有效载荷支架组装完毕
接下来是将底板安装到有效载荷支架上。
您需要如图 4 所示的部件。然后使用尼龙螺母安装配电板底座,如图 5 所示。最后用 8 个六角螺钉将底板与有效载荷支架连接起来(图 7)。
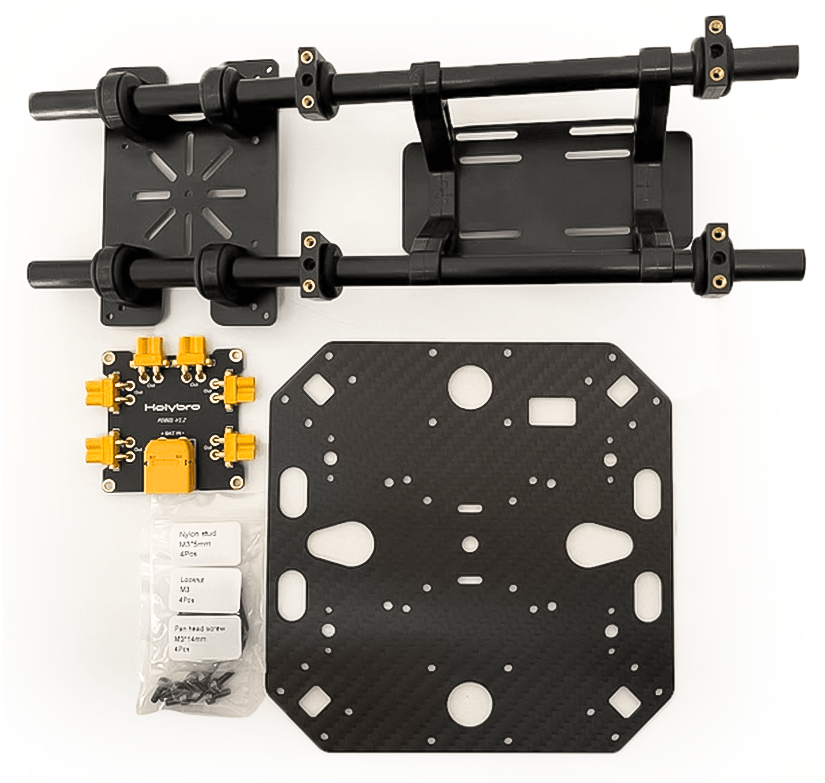
图 4:所需材料
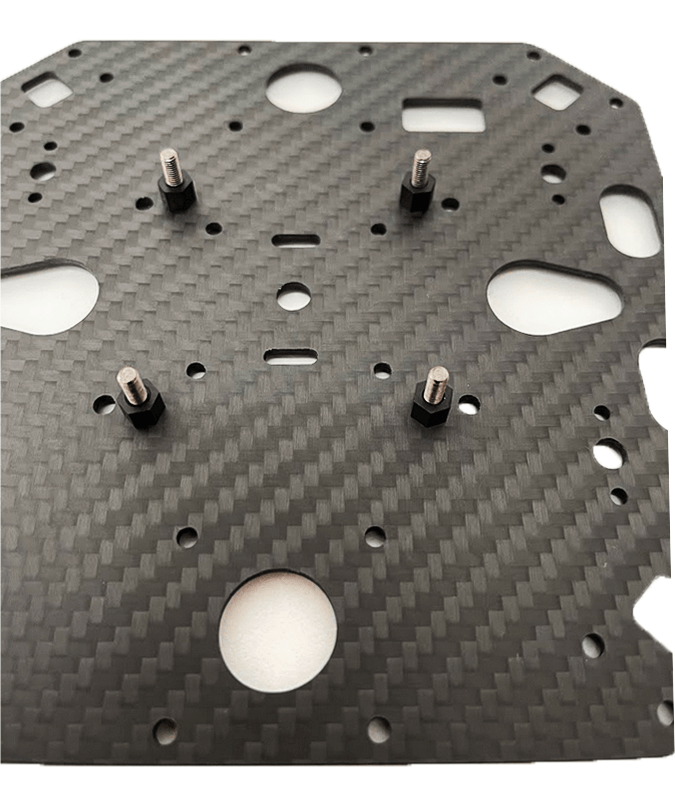
图 5:PDB 安装底座
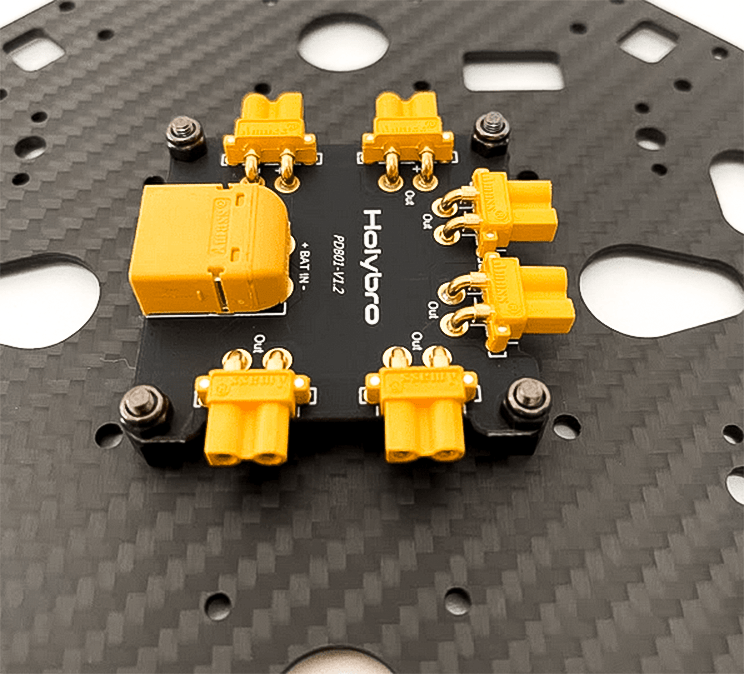
图 6:用尼龙螺母安装 pdb
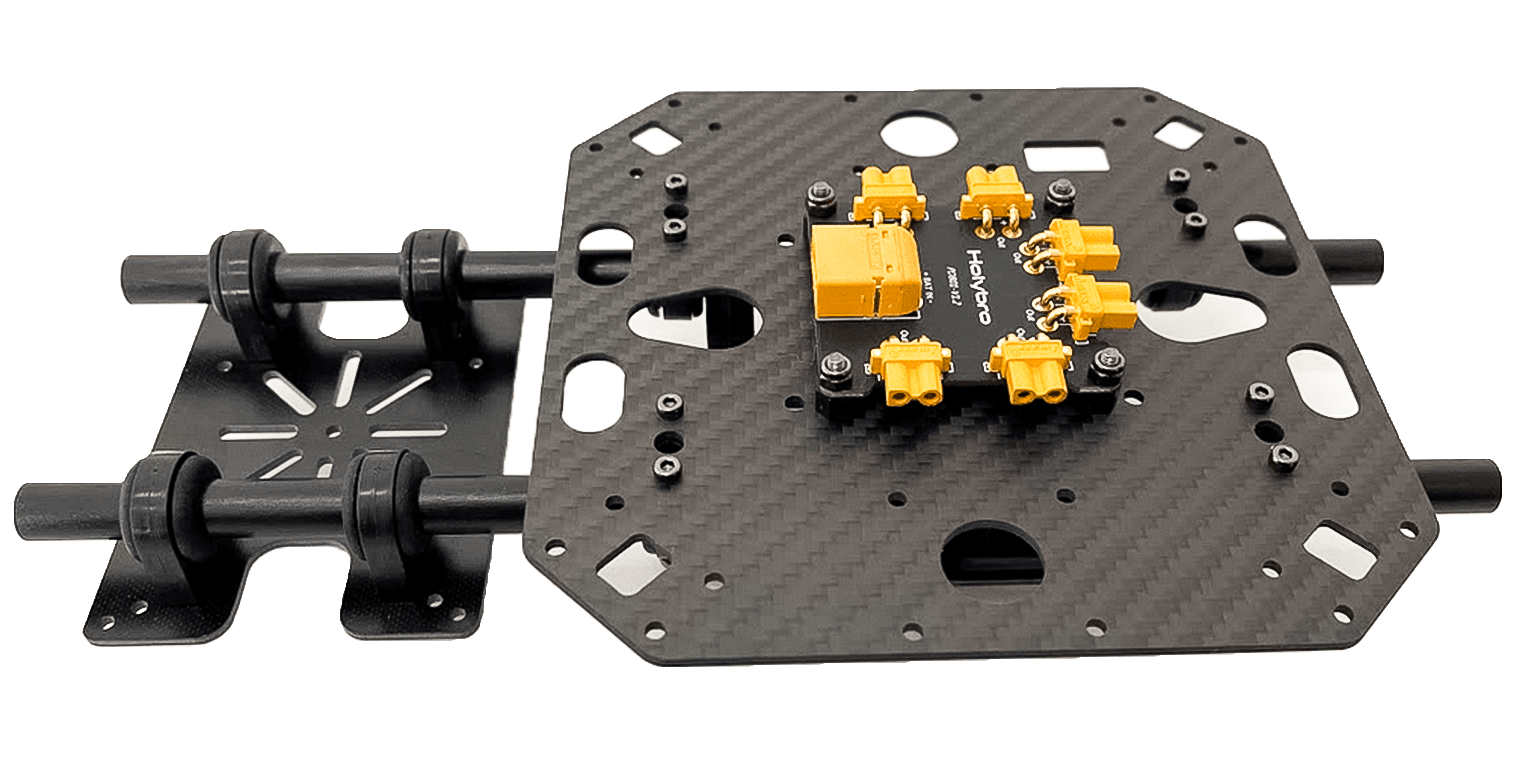
图 7:有效载荷支架上的安装板
让我们收集安装起落架所需的物品,如图 8 所示。使用六角螺丝将起落架连接到底板上。您还需要打开每个脚架上的三颗六角螺丝,以便将其推入碳纤维管道。不要忘记将它们重新拧紧。
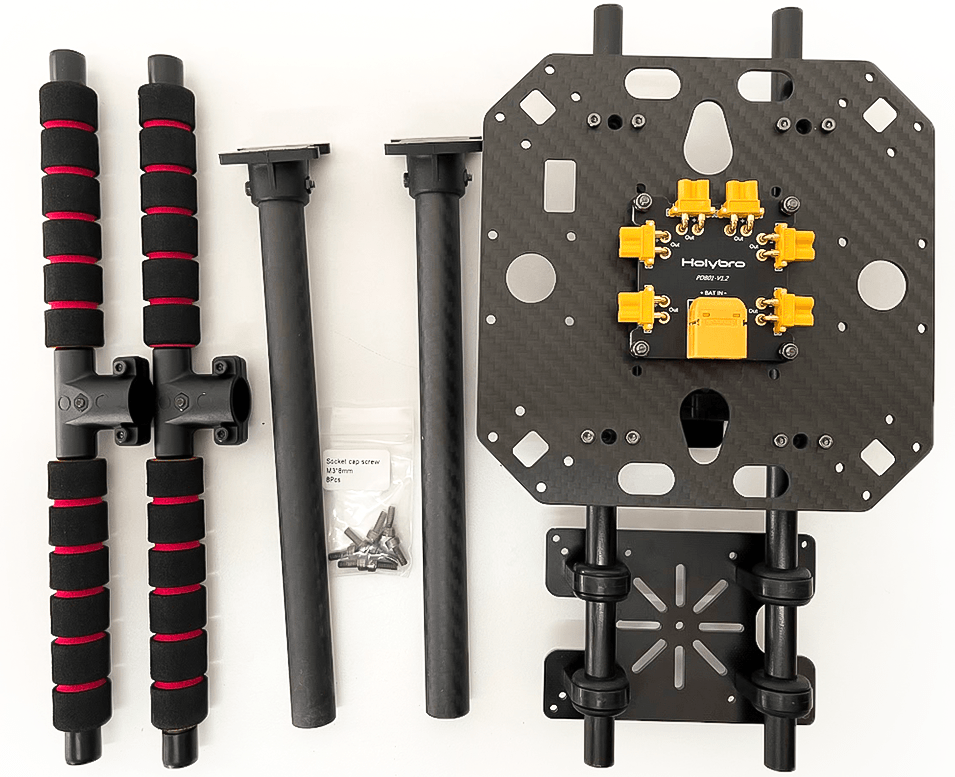
图 8:起落架安装所需部件
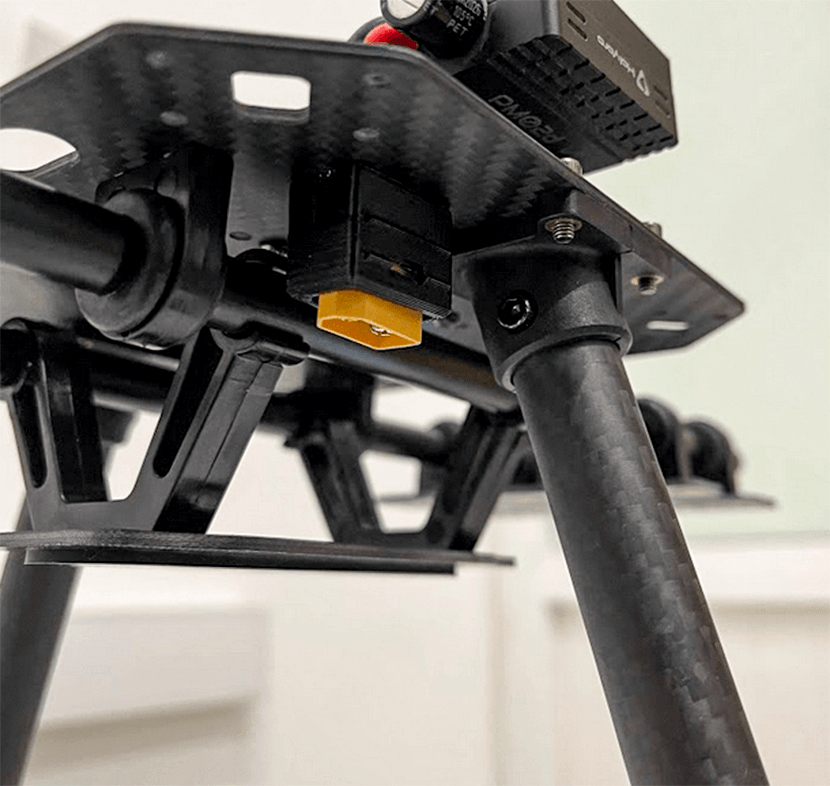
图 9:起落架与机身的连接
现在我们将收集所有臂,以便安装顶板。请注意,臂上的电机编号必须与顶板上的编号一致。幸运的是,电机已安装完毕,电调也已提前连接。先将所有螺丝穿过,因为您已经将机臂固定在各自的位置上(如图 11 所示,它们有一个导向装置,以确保它们就位),然后稍微拧紧所有尼龙螺母。然后将 XT30 电源连接器连接到电源板上。请记住,信号线必须穿过顶板,以便稍后连接到 Pixhawk。

图 10:连接臂所需材料。

图 11:支臂安装指南
使用六角扳手和螺母起子拧紧所有 16 个螺钉和螺母。

图 12:安装顶板
接下来,您可以使用贴纸将 pixhawk 安装到顶板上。建议将 Pixhawk 的箭头方向与顶板上的箭头方向保持一致。

图 13:Pixhawk 上的贴纸胶带
如果您想将 GPS 安装在配套的电脑板上,现在可以用 4 个螺钉和螺母将 GPS 固定在电脑板上。

图 14:将 GPS 固定在配套板上
用胶带将 GPS 粘在 GPS 杆的顶部,然后安装 GPS 杆。确保 GPS 上的箭头指向前方(图 15)。

图 15:GPS 和桅杆
最后,您可以将遥测无线电等 Pixhawk 接口连接到 "TELEM1 "和相应的电机信号线。
请参阅 Pixhawk 5X 快速入门 了解更多信息。
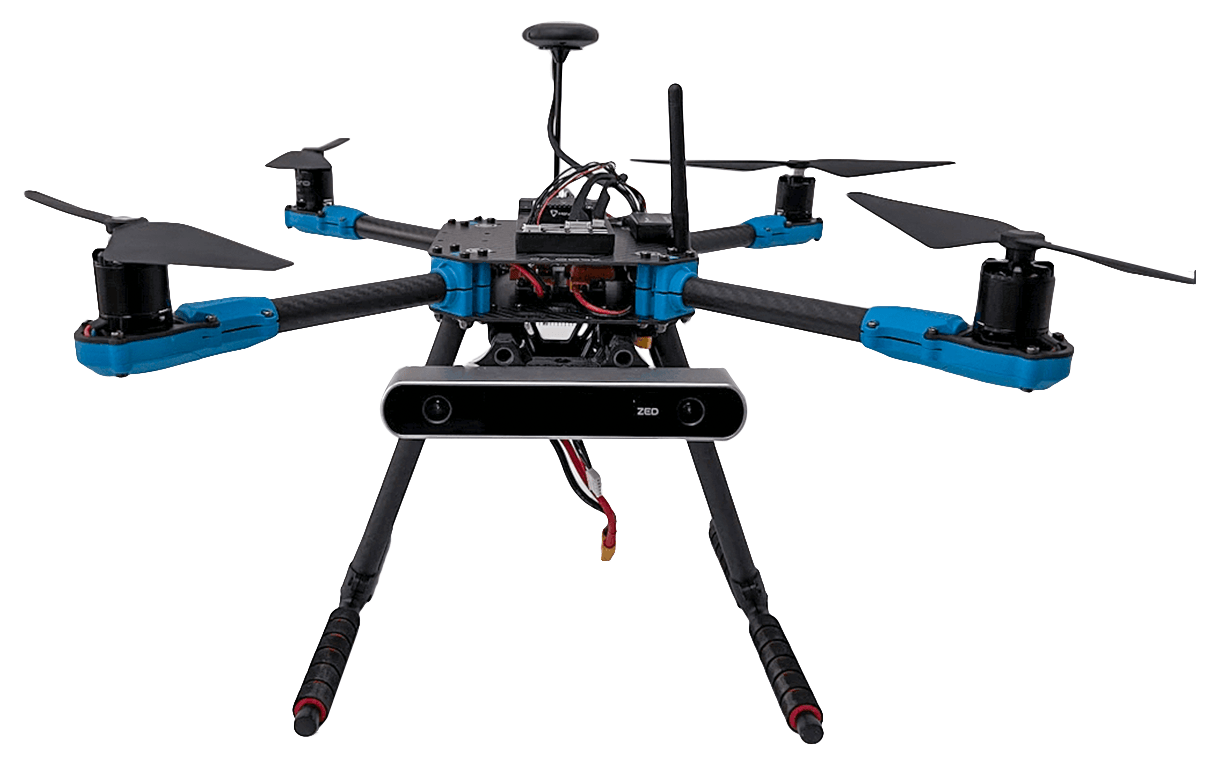
就是这样。组装完毕的套件如下所示(套件中不包括深度摄像头):
# 安装/配置 PX4
TIP
有关安装和配置 PX4 的完整说明,请参见 基本配置.
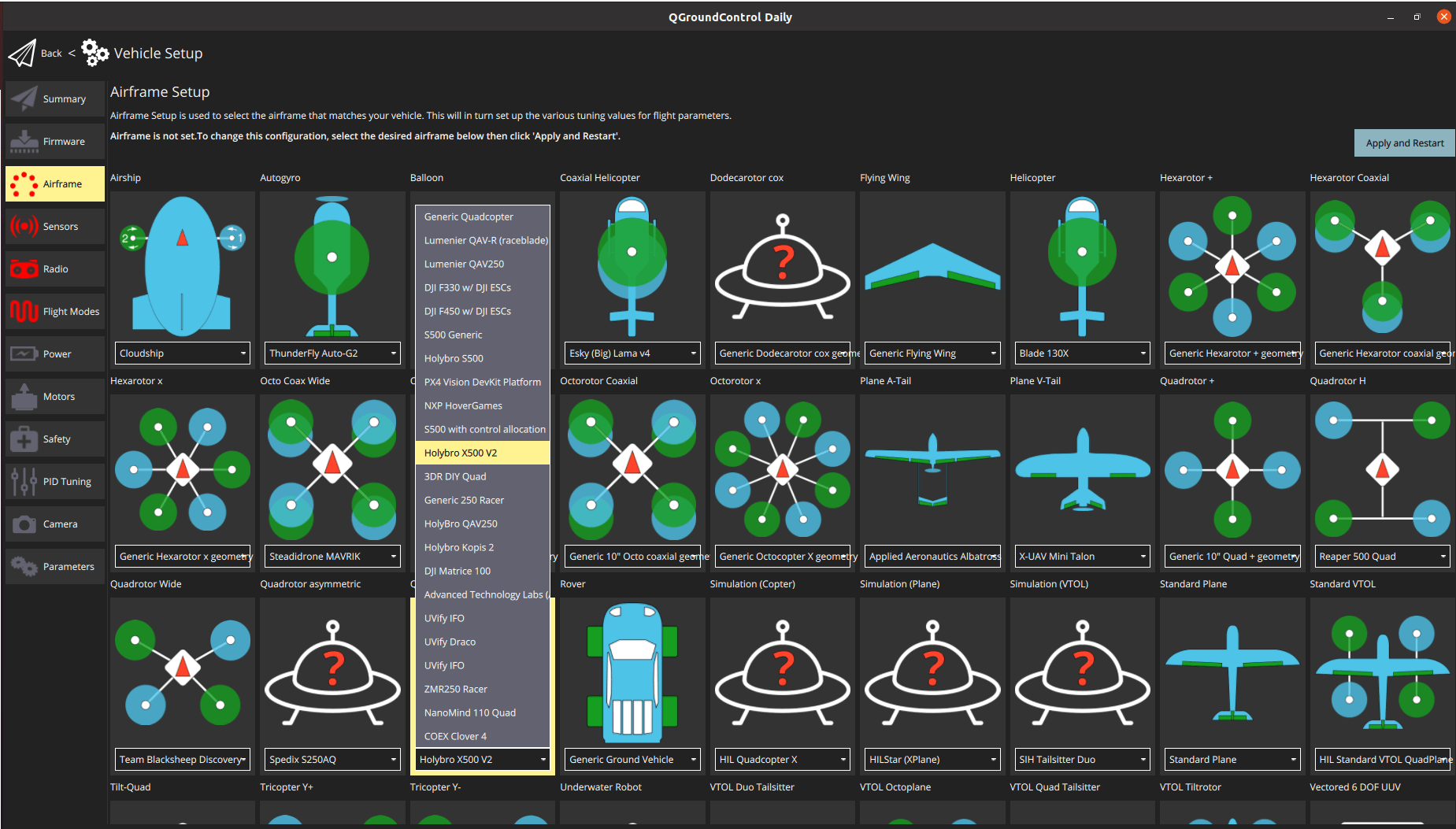
QGroundControl 用于安装 PX4 自动驾驶仪并为 X500 机架进行配置/调整。 下载并安装 (打开新窗口) QGroundControl 您的平台。
首先更新固件和机身:
然后执行必要的设置/校准:
理想情况下,你也应该这样做:
# 调音
机身选择套件 默认 机架的自动驾驶参数。这些参数足以满足飞行需要,但最好还是针对特定的机架结构调整参数。有关如何调整的说明,请参阅: 多旋翼飞行器基本 PID 调节.
# 致谢
此构建日志由 PX4 团队提供。