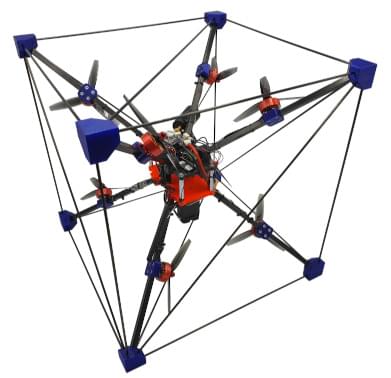
# 多用途直升机
多旋翼飞行器是一种可向所有方向(6 个自由度)提供推力的多旋翼飞行器。这样,它就可以向任何方向移动,而无需倾斜,并且可以在任意倾斜角度悬停。所有这些都是通过以特定方式安排电机位置和推力轴来实现的:
这次建造沿用了 达里奥-布雷西亚尼和拉斐尔-安德烈亚 (打开新窗口).
# 材料清单
该构建所需的组件有
- 电子设备
- 飞行控制器: Holybro KakuteH7
- 与 2x Tekko32 F4 4in1 电子调速器 (打开新窗口)
备注
您可以选择自己的飞行控制器,它只需支持 8 个 DShot 输出即可。
- 全球定位系统: ZED-F9P (打开新窗口)
- GPS 螺旋天线 (打开新窗口)
备注
任何其他 GPS 也可以使用,但螺旋天线在倒立飞行中的表现会更好。
- 任何遥控接收器
- 外部磁力计我们使用 RM-3100 (打开新窗口).
- 遥测链路,例如 无线网络
- 推进器
- 电机8x BrotherHobby LPD 2306.5 2000KV/2450KV/2650KV (打开新窗口)
- 3D 螺旋桨: 2x HQProp 3D 5X3.5X3 3叶螺旋桨(一套4个) (打开新窗口) 或 2 倍 Gemfan 513D 3叶 3D 螺旋桨(4个装) (打开新窗口)
- 电池:我们使用的是 6S 3300mAh 锂电池。请务必检查尺寸,使其适合机架。
- 电池带
- 框架
- 碳素方管 R 8mm X 7mm X 1000mm,如 这里 (打开新窗口)
- 碳棒 R 3mm X 2mm X 1000mm,例如 这里 (打开新窗口)
- 所需长度:
- 方形管:8 根,长度为 248 毫米
- 杆:12x328 毫米、6x465 毫米
- 螺丝
- 电机和支座40x M3x12mm
- FC 安装4x M3x35mm,4x M3 螺母
- 支座4x 40mm
- 三轴模型 (打开新窗口)

# 装配
# 框架
打印 3D 部件
备注
角件的方向很重要。如果杆的角度不对,你就会注意到是否有问题。
切割杆
将框架部件连接在一起,测试是否都能正常工作:
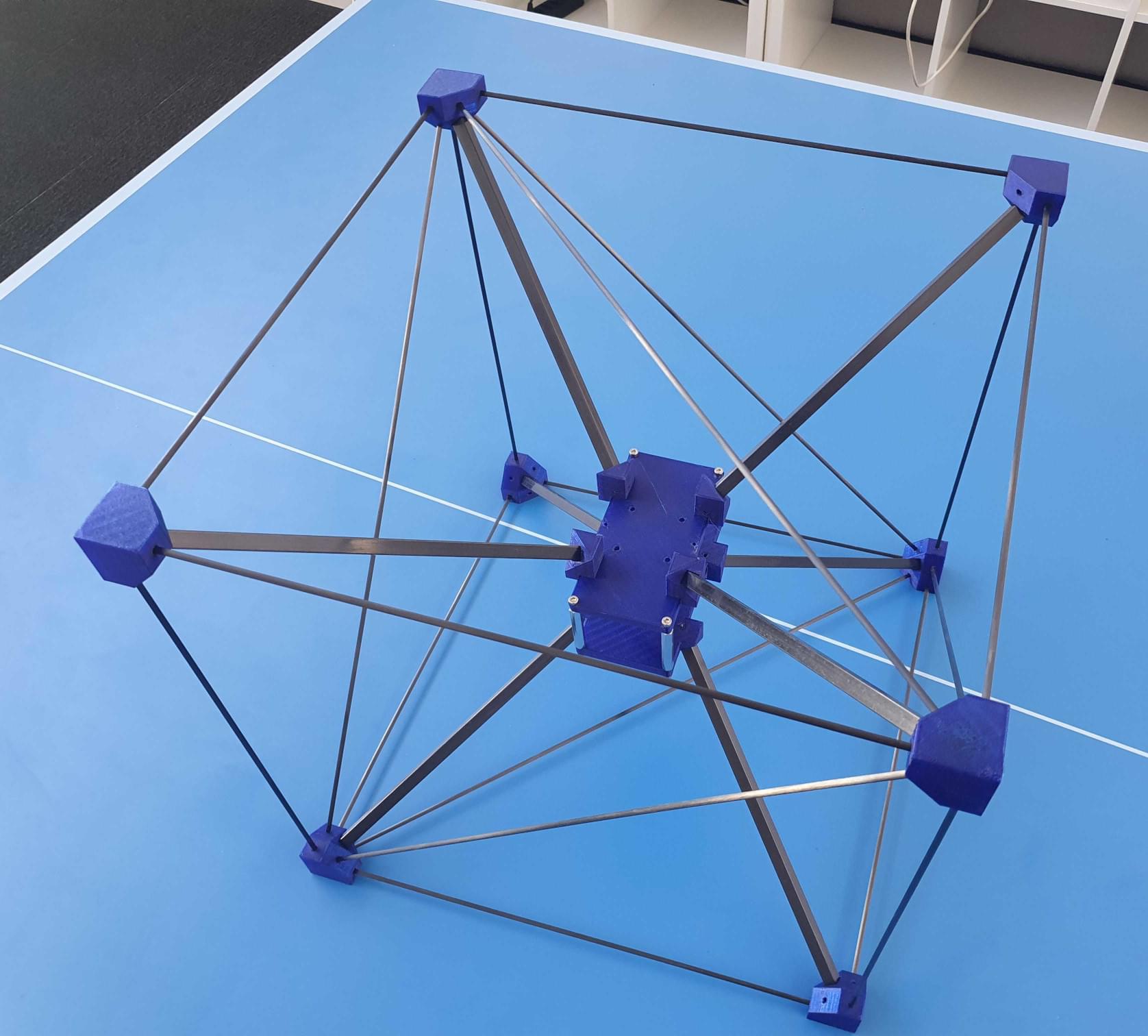
将电机尽量向外放置,不要让螺旋桨接触到杆。
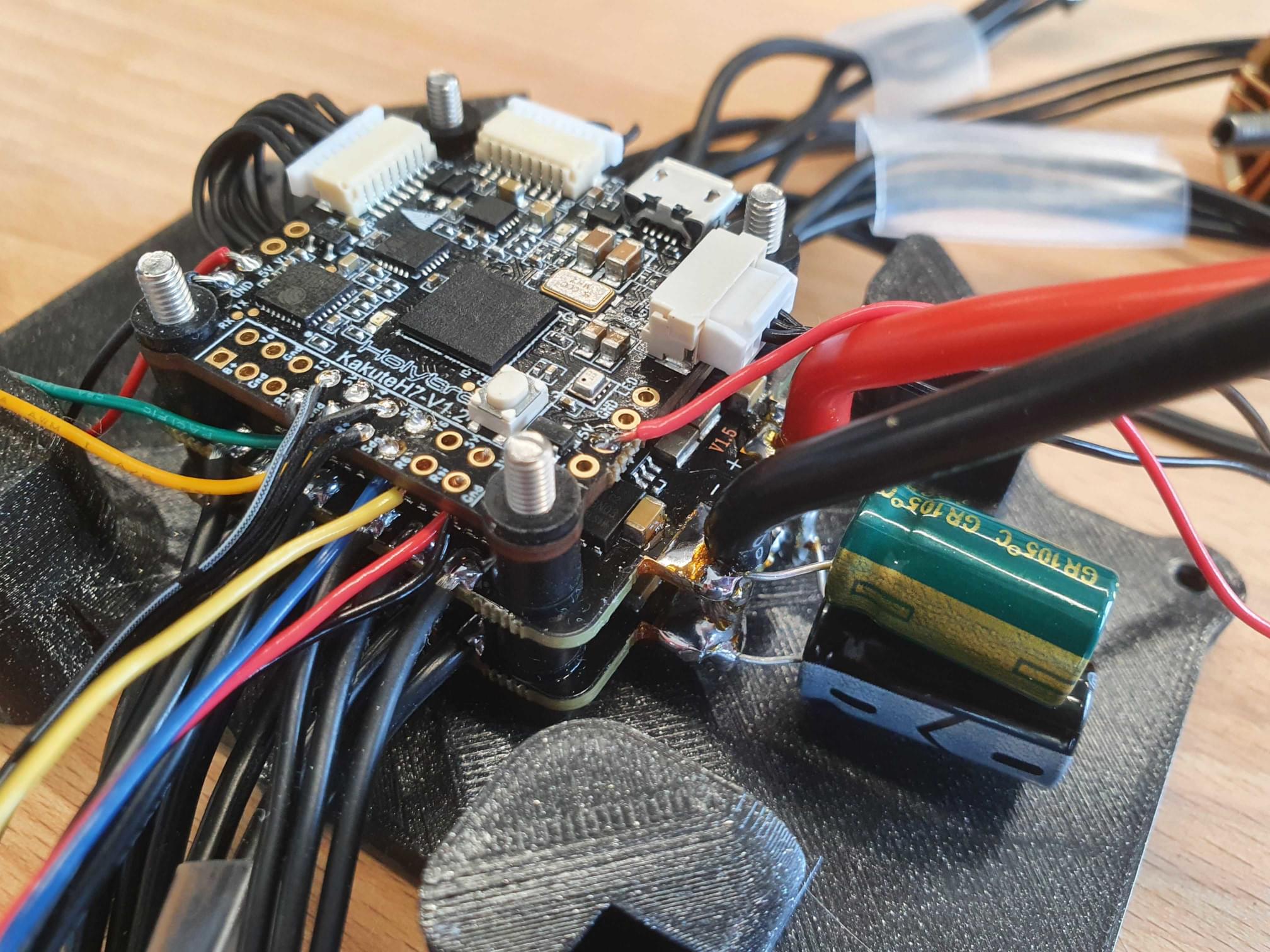
# 电子产品
将外围设备焊接到飞行控制器上。我们使用了以下分配:
- 电调:2 个电调可以直接连接到 KakuteH7 的两个连接器上。为了避免冲突,我们去掉了其中一个连接器上的电源针脚(最右边的针脚)。
- 遥测至 UART1
- GPS 至 UART4
- RC 至 UART6
备注
- 确保磁强计远离电源。我们最终将其放置在中心部件的底部,并垫上 4 厘米厚的泡沫塑料。
- 在气压计上贴一些胶带(不要贴住开口!),以避免光线的影响。
- 我们没有给框架涂胶。当然,初次试飞后最好粘一下,但不粘也行。
# 软件配置
# ESC
首先,将电调配置为 3D 模式(双向)。在 3D 模式下,我们在使用原有的电调设置时遇到了一些问题:在尝试切换方向时,电机有时无法启动,直到电调重新启动。因此我们不得不更改电调设置。
为此,您可以在飞行控制器上使用 Betaflight,然后使用直通模式和 BL Heli 套件(确保在 Betaflight 中配置了带有 8 个发动机的机身)。设置如下
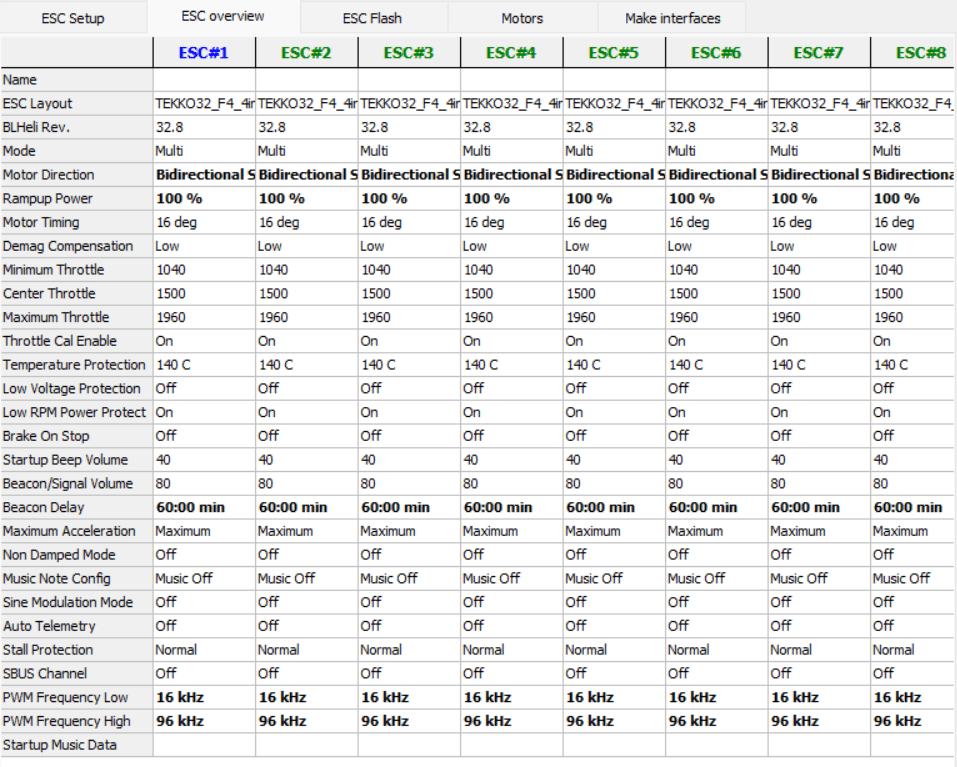
特别是
- 将电机方向设置为 双向软
- 将升压功率增至 100% (这比较保守,可能会降低效率)
备注
确保更改设置后电机不会过热。
# PX4
- 选择通用多旋翼飞行器机身
- 启用 SYS_CTRL_ALLOC
- 使用 上膛开关请勿使用棍棒上膛
- 选择 DShot 作为所有八个输出端的输出协议
- 据此配置电机:
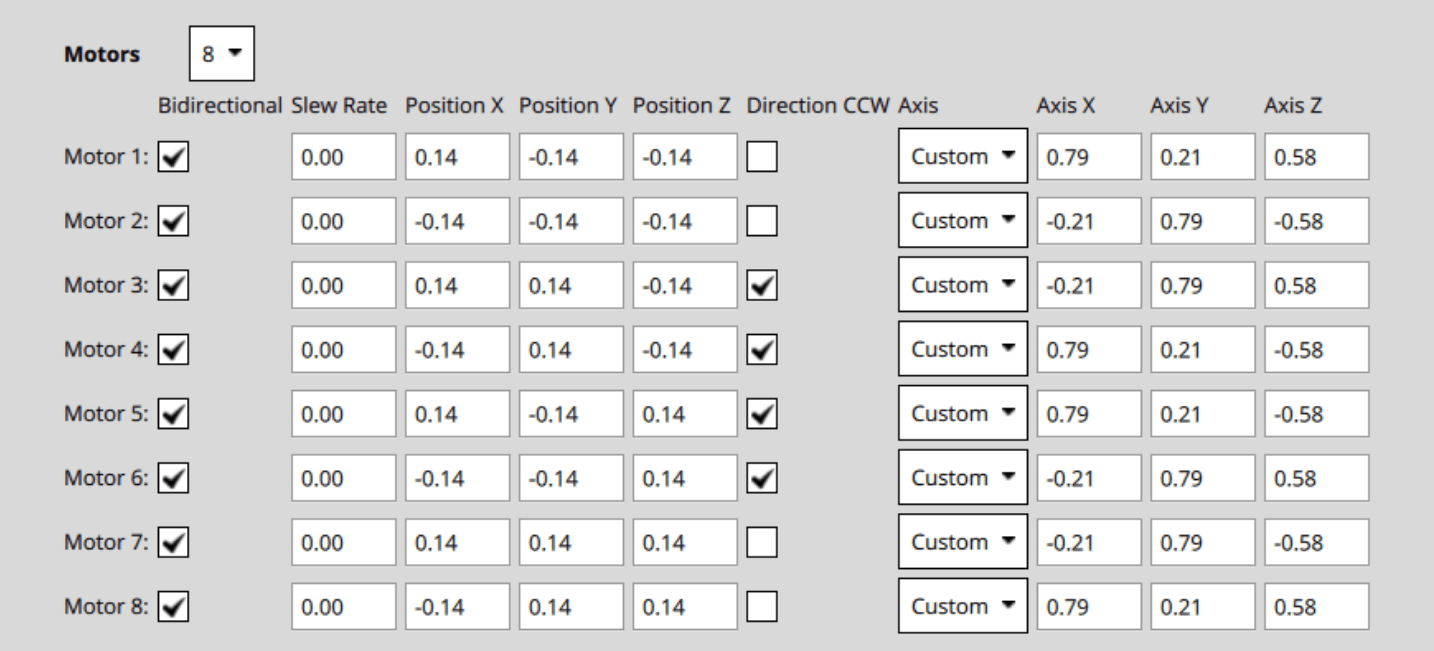 我们采用了以下惯例:电机朝向轴指向的方向。旋转方向与正推力(向上移动电机滑块)方向一致。请确保使用正确的道具,因为道具有 CCW 和 CW 两种版本。
我们采用了以下惯例:电机朝向轴指向的方向。旋转方向与正推力(向上移动电机滑块)方向一致。请确保使用正确的道具,因为道具有 CCW 和 CW 两种版本。 - 参数
- 该文件 (打开新窗口) 包含所有相关参数。
# 视频
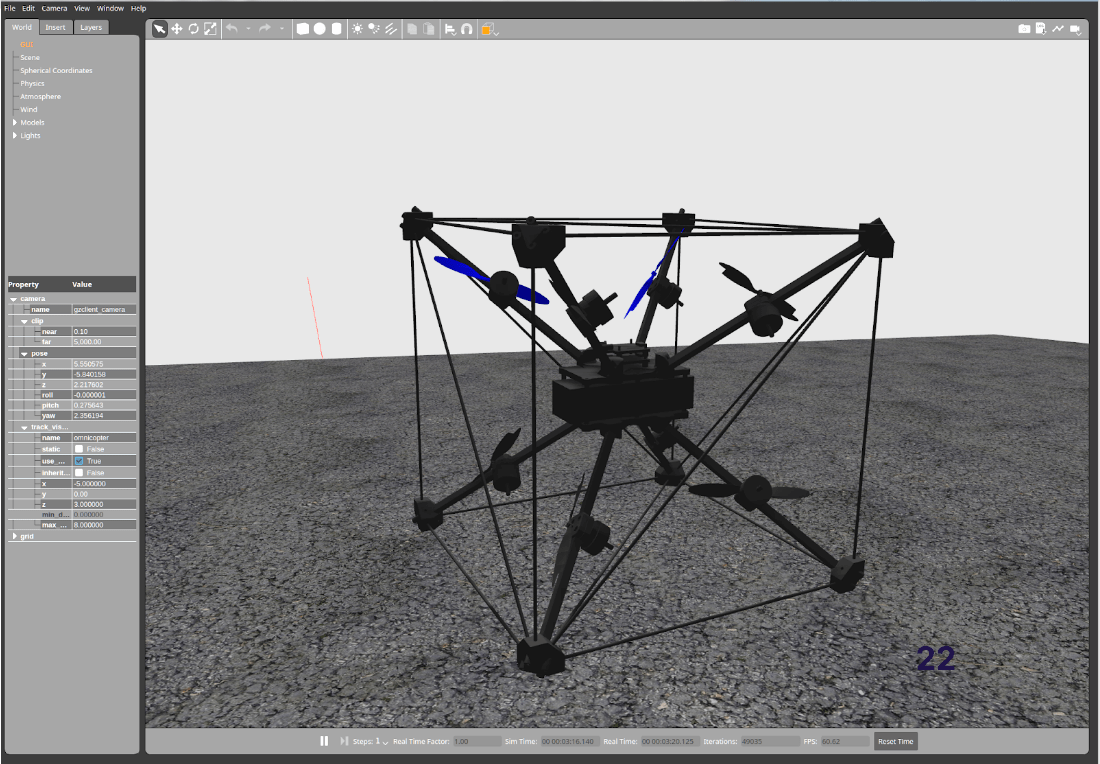
# 模拟
有一个全方位直升机仿真场景Gazebo模拟目标:
生产 PX4_SITL 仿真场景Gazebo_omnicopter
# 备注
一些一般性意见:
- 悬停节流阀约为 30%。
- 飞行时间约为 4-5 分钟。如果使用更大的螺旋桨,飞行时间可能会稍有延长。