# 致动器配置和测试
致动器设置 该视图用于定制飞行器的具体几何形状,为飞行控制器输出分配执行器和电机,以及测试执行器和电机的响应。
显示的元素取决于 选择框默认情况下,输出映射如图所示 机身参考.
备注
致动器 视图仅在以下情况下显示 动态控制分配 启用后,几何体和混音器配置文件将被参数取代。目前默认情况下是禁用的。
要启用此功能,请设置参数 sys_ctrl_alloc=1 并确保在 CA_AIRFRAME.您可能需要重新启动 QGroundControl.
最简单的模拟尝试方法是使用以下任何一种仿真场景Gazebo 生产 目标,这些目标已预先启用了控制分配:
make px4_sitl gazebo_iris_ctrlalloc make px4_sitl gazebo_typhoon_h480_ctrlalloc
在 QGroundControl 这里: "Q"(应用程序菜单)> 载具设置> 执行器 (标签)。
# 概述
视图有三个部分:
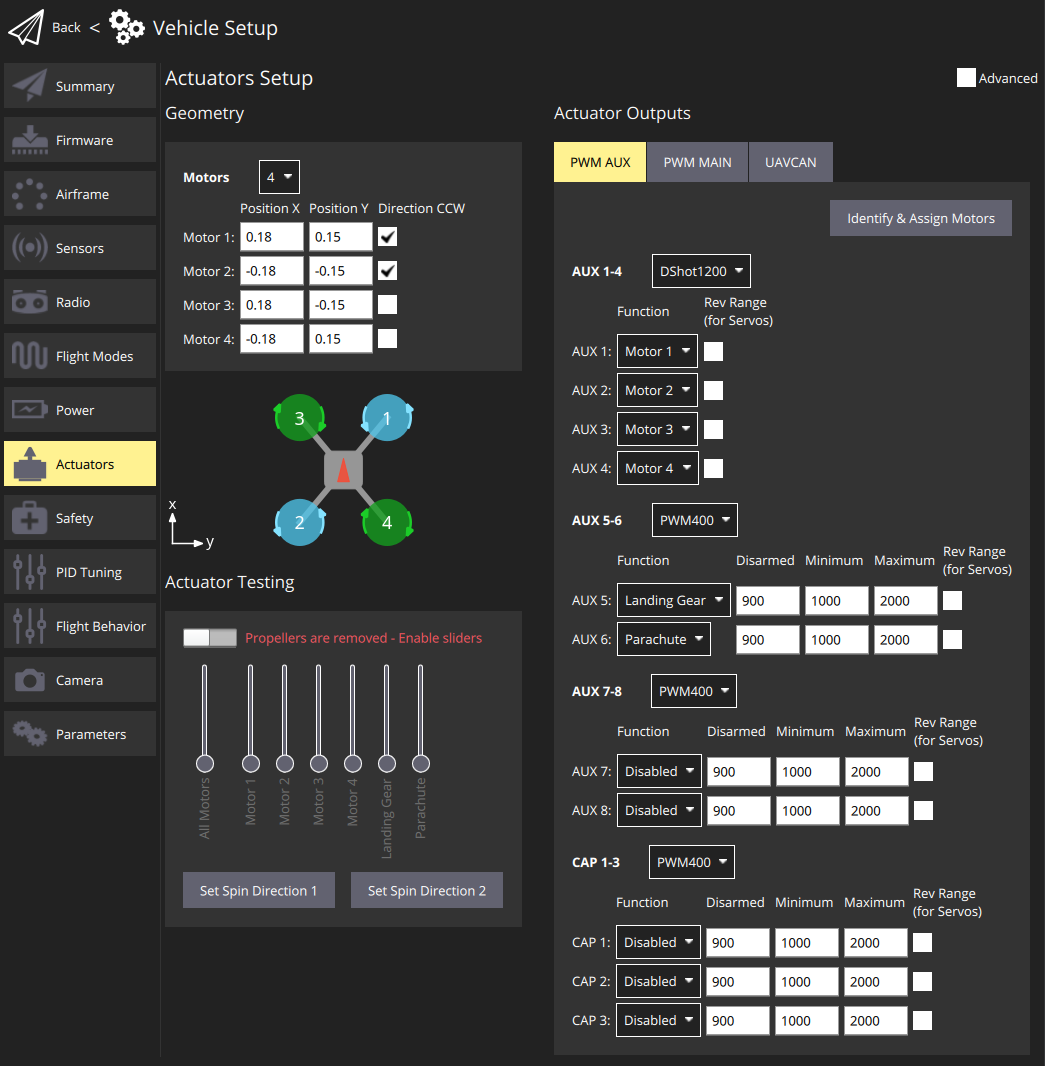
四旋翼飞行器的设置屏幕可能与下图类似。它定义了一个具有 X 几何结构的四旋翼直升机。它将 4 个电机映射到 AUX1 至 AUX4 输出,并指定连接到 DShot1200 电调。它还映射了 PWM400 AUX 输出,用于控制降落伞和起落架。
备注
默认情况下只显示最常用的设置。选择 高级 右上角的复选框来显示所有设置。
# 几何学
几何体部分用于为选定的几何体设置任何可配置的几何体相关参数。 机身.这包括 电机的数量、功能和属性。 控制面.对于 VTOL 倾转旋翼飞行器,还将包括下列飞行器的数量和特性 倾斜伺服器
备注
用户界面是为所选机型定制的:
- 只有 可配置 显示所选机型的字段;隐藏该机型不可配置的字段。
- 电机位置图目前只在多旋翼飞行器框架中显示。
# 电机几何学
在 "电机几何图形 "部分,您可以设置每个电机的电机数、相对位置和其他属性。
大多数电机属性适用于所有机架。少数属性适用于特定机架。例如 倾斜 和 轴线 只适用于 倾转旋翼机 VTOL 和 标准 VTOL 分别为
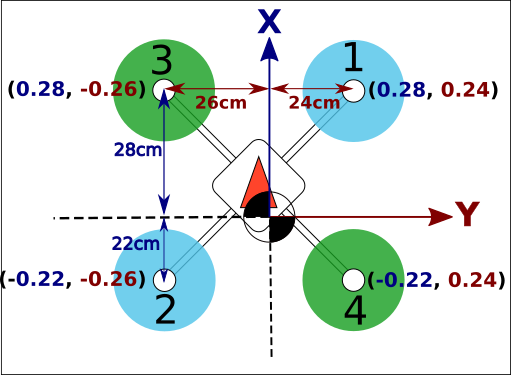
多旋翼飞行器的几何配置图显示了每个发动机的相对 x、y 位置。请参见 机身参考 以便广泛了解其他框架的电机位置。
下文将介绍核心几何概念和一些不同框架的配置。
# 马达几何形状:多旋翼
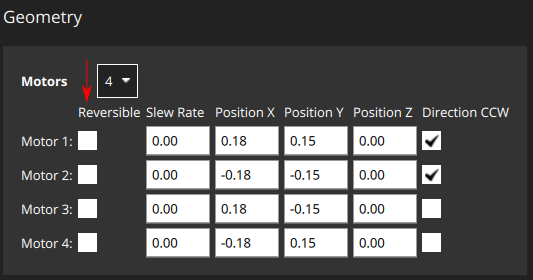
下图显示了多旋翼飞行器机架的几何设置,包括高级设置和非高级设置。
备注
具体来说,这是一台 四旋翼宽 多旋翼飞行器。其他多旋翼机的机架也有类似配置。
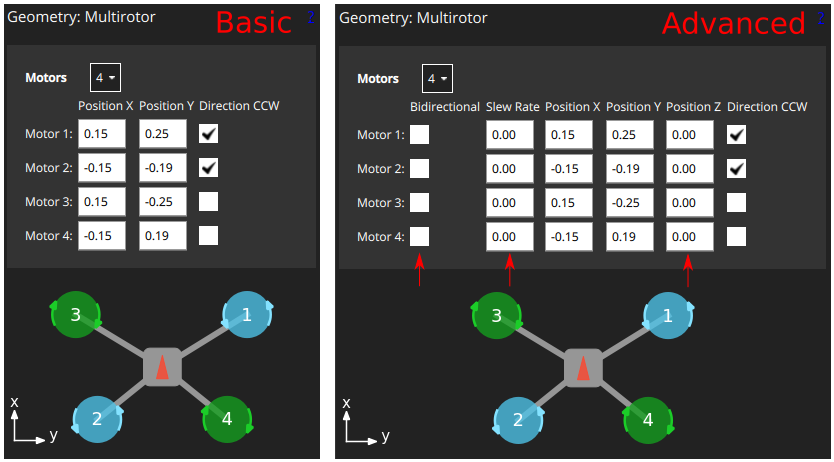
首先是 发动机 下拉设置可让您选择电机数量(上例中为 4 个)。
然后可以为每个电机设置
定位(POSITION) X: X 位置以米为单位。位置 Y: Y 位置以米为单位。位置 Z: Z 位置以米为单位。- 高级
方向 CCW:复选框表示电机逆时针旋转(取消复选表示顺时针旋转)。 - 高级
双向:复选框,表示电机是 双向 - 高级
压摆率:请参阅 控制面几何形状 部分获取更多信息
备注
X, Y, Z 定位(POSITION)在 FRD 坐标系,相对于 重心.注意,这可能与飞行控制器的位置不同!
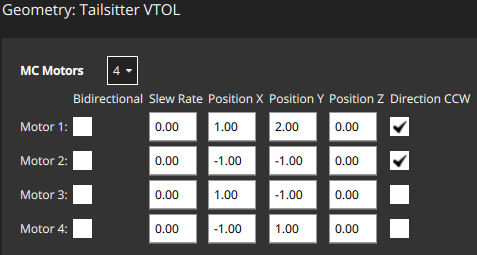
# 电机几何学:VTOL 四旋翼尾翼
电机的几何形状 VTOL 四尾翼飞行器 如下所示(其他尾翼 VTOL 飞行器的配置方法与此类似)。
电机的配置字段与 多旋翼几何.
# 电机几何形状:VTOL 倾转旋翼机
电机的几何形状 通用四翼 VTOL 倾转旋翼机 如下所示(配置其他 VTOL 倾转旋翼机 将类似)。
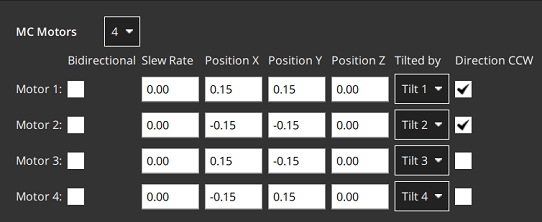
倾斜:用于倾斜电机的相关伺服。该舵机的属性在 电机倾斜伺服几何形状.
# 电机几何形状:标准 VTOL
电机的几何形状 通用标准四翼 VTOL 倾转旋翼机 如下所示(配置其他标准 VTOL 的方法类似)。
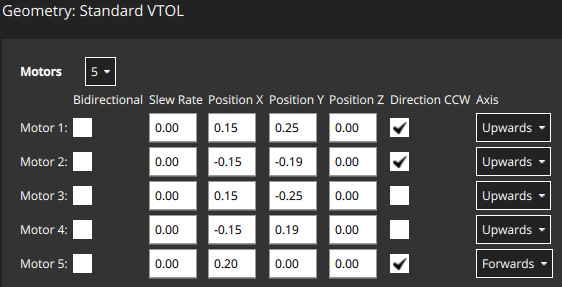
电机的大部分配置字段与 多旋翼几何.还有一个附加字段用于指示电机移动飞行器的方向(对于标准 VTOL,悬停电机通常设置为向上,而推杆电机则设置为向前)。
轴:之一向上,向下,前锋,向后,向左,向右,定制- 如果
定制则用户界面会显示另外三个字段,用于设置电机方向。
- 如果
# 电机几何:其他载具
其他载具类型将为其车架类型定义合适的电机几何形状。同样,这些电机一般也具有如上所示的属性。
例如,固定翼飞行器可能只有一个推杆电机,而带有差速转向装置的漫游车则有一个用于油门和转向的电机。
# 电机位置坐标系
电机位置的坐标系为 FRD(车身框架),其中 X 轴向前,Y 轴向右,Z 轴向下。
原点是载具的 重心.这可能 不是 与自动驾驶仪的位置相同。
# 双向电机
有些飞行器可能会使用双向电机(即支持双向旋转的电机)。例如,希望前后移动的地面载具,或拥有可向任一方向转动的推杆电机的 VTOL 载具。
如果使用双轴电机,请确保选择 可逆 复选框(复选框显示为高级选项)。
请注意,您还需要确保与双向电动机相关的电调已进行适当配置(例如,DShot 电调已启用 3D 模式,可通过以下方式实现 DShot 命令).
# 控制面几何形状
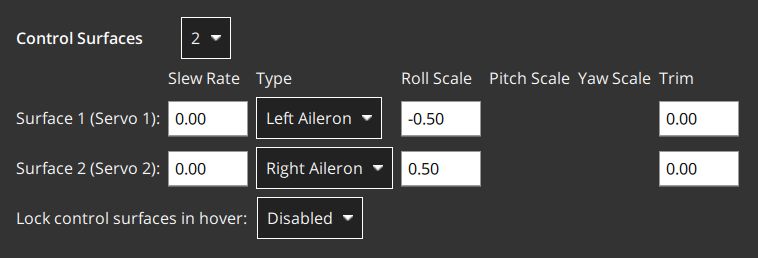
在几何面板的控制面部分,您可以设置飞行器上控制面的数量和类型。在某些情况下,您可能还需要设置微调和回转率值。更高级的用户还可以配置滚动标度、偏航标度和俯仰标度(一般来说默认值是可以接受的,不需要这样做)。
带有两个副翼的飞行器控制面示例如下。请注意,副翼只影响滚动,因此俯仰和偏航区域被禁用。
这些字段是
控制面:控制面的数量(首先设置!)。类型:每个控制面板的类型:左副翼,右副翼,电梯,舵,左升降舵,右电梯,左 V 形尾翼,右 V 形尾翼,左挡板,右挡板,空气制动器,定制.滚动刻度:推杆绕滚动轴的效能(归一化:-1 至 1)。 一般情况下,应使用执行机构的默认值.频率刻度:推杆绕螺距轴的效率(标准化:-1 至 1)。 一般情况下,应使用执行机构的默认值.偏航刻度:执行器绕偏航轴的效率(标准化:-1 至 1)。 一般情况下,应使用执行机构的默认值.修剪:在执行机构上增加一个偏移量,使其在没有输入的情况下居中。这可以通过反复试验来确定。压摆率:电机/伺服信号通过全输出范围的最短时间(秒)。- 该设置限制了执行机构的变化速率(如果未指定,则不应用速率限制)。它适用于移动速度过快可能会损坏的执行器,如 VTOL 飞行器上的倾斜执行器。
- 例如,设置为 2.0 意味着不会命令电机/伺服器以少于 2 秒的速度从 0 移动到 1(如果是可逆电机,则范围为 -1 到 1)。
悬停时锁定控制面:已启用:大多数载具在悬停时不使用控制面。使用此设置可锁定控制面,使其不影响载具动态。失能:为在悬停中使用控制面的飞行器设置该值,例如双尾翼飞行器(使用升降舵控制俯仰和偏航)。当飞行器高速移动或遇到大风时,也应为使用控制面在悬停模式下提供额外稳定性的飞行器设置此项。
# 致动器滚动、俯仰和偏航缩放
备注
对于大多数机身设置,不应更改各控制面类型的默认值。
滚动刻度, 频率刻度 和 偏航刻度 值表示推杆绕相应轴线的归一化效能。
调整数值是一个低级/高级主题,通常只有在调整耦合控制面(如同时控制俯仰和滚转的升降舵)时才需要。在这种情况下,您需要了解以下内容:
- 输入的数字被直接放入分配矩阵,然后进行反演,将所需时刻(归一化)转换为控制信号。
- 扩大比额表将 减小 控制面的偏转(当它倒转时)。
# 控制面板偏转公约
下图显示了挠度的计算公式:
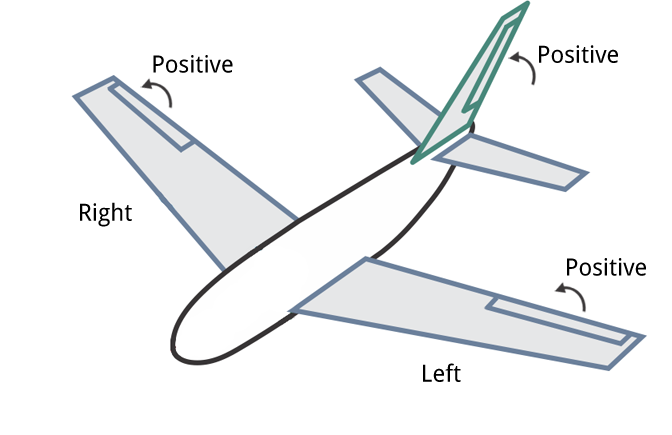
总而言之
- 水平控制面 向上运动等于正偏转。包括副翼等
- 垂直控制面 向右运动为正偏转。包括方向舵等。
- 混合控制面 向上/向右运动为正向运动(同上)。包括 V 形尾翼等。
# 电机倾斜伺服几何形状
VTOL 倾转飞行器 可倾斜电机,在悬停和前飞之间进行转换。本节定义了倾转舵机的属性。这些属性在倾转旋翼机的电机几何图形中被映射到特定的电机上。
下面的示例显示了倾斜伺服器的设置。 如上图所示倾斜旋翼发动机的几何形状.
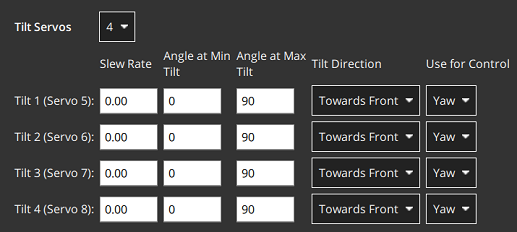
可设置的值有
倾斜伺服器:舵机(可倾斜电机)的数量。最小倾斜角: 最大倾斜角度 相对于 Z 轴的度数。最大倾斜角度: 最小倾斜角度 相对于 Z 轴的度数。倾斜方向:前方(正 x 方向)或向右(正 y 方向)。用于控制: 用于偏航/俯仰的倾斜伺服器无:不使用扭矩控制。亚乌:倾斜伺服器用于控制偏航。间距:倾斜伺服器用于控制俯仰。偏航和俯仰:倾斜伺服器用于控制偏航和俯仰。
# 倾斜伺服坐标系
倾斜转子角度的坐标系如下所示。倾斜角的参考方向是笔直向上(0 度)。朝载具前方或右侧的倾斜角为正,朝后方或左侧的倾斜角为负。
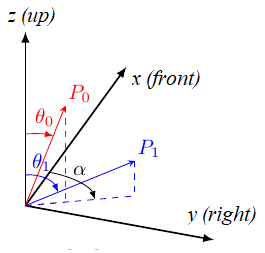
最小倾斜角 和 最大倾斜角度 表示倾斜伺服器的移动范围。最小倾角为较小的 数值 (而不是绝对值)。
如果最大/最小倾斜矢量为 P0 和 P1 如上图所示,两个倾斜角都是正的,但 θ0 较小:
最小倾斜角= θ0最大倾斜角度= θ1
备注
如果将图表镜像成 P0 和 P1 则两个倾斜角均为负值。因为 θ1 将比 θ0这将是 最小倾斜角.
同样,伺服器也会移动:
- 在直立位置和前倾位置之间
min=0和max=90. - 以直立位置为中心对称 45 度,就会有
min=-45和max=45 - 在直立和后退位置之间
最小值=-90和max=0.
倾斜方向 表示伺服器是否在平面内向 正面 或 对 在图中,这将用在示意图上将表示为 α 的值只能是 0(前)或 90(右)。
# 用于偏航/俯仰控制的倾斜伺服器
倾斜伺服器可在一个或多个轴上提供扭矩,用于载具偏航或俯仰:
- 偏航通常以这种方式设置,但在配有四个或更多电机的载具上,通常使用电机来代替。
- 俯仰通常使用差动发动机推力进行控制。在无法使用差动推力的机身上,使用倾角伺服器进行控制非常有用,例如 直升机 (打开新窗口).
是否使用该功能在 用于控制 设置。
# 致动器输出
致动器输出 部分用于将特定框架使用的电机、控制面舵机和其他执行器分配给飞行控制器上的物理输出,并为这些输出设置参数。
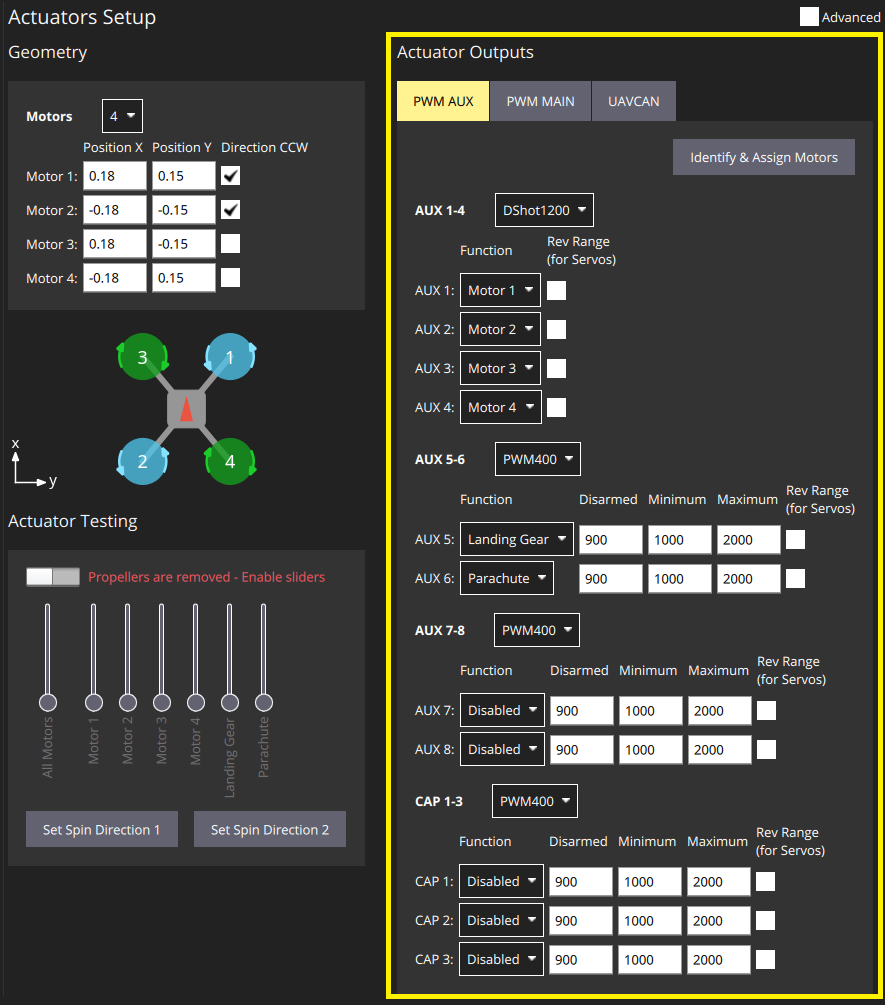
为连接的飞行控制器所支持的每条输出总线显示单独的选项卡:PWM AUX(IO 板输出)、PWM MAIN(FMU 板输出)、UAVCAN。
电机和致动器(被称为 "quot.");功能")可分配给任何可用总线上的任何物理输出。
备注
在控制电机时,PWM 辅助输出比 PWM 主输出更受青睐(它们的延迟更低)。
PWM 输出根据硬件定时器组进行分组。这意味着一个组中的所有输出必须以相同的速率在相同的协议下运行(例如,一个组中所有输出的 PWM 信号频率为 400Hz)。因此,不可能将伺服和电机映射到同一个输出组中,因为它们通常以不同的速率运行。
PWM AUX 选项卡的 CAP 输出通常用作 摄像机捕捉/触发输入.不过,您可以将 CAP 输出映射到其他输出功能,其他 AUX 输出可用作摄像机捕捉/触发输入。
备注
配置摄像机捕捉/触发输入需要重启才能生效
您应该为输出端分配与电机和舵机的物理接线相匹配的功能,并使用 执行器测试 部分,以确定适当的输出参数值。这些步骤将在 输出分配和配置.
# 输出功能
输出功能用于映射机身的逻辑功能,例如 电机 1 或 起落架这样就可以轻松地将特定的输出引脚用于几乎任何用途。
某些功能只适用于特定的框架或输出类型,其他框架或输出类型将不提供这些功能。
功能包括
失能:输出端无指定功能。常数_最小值:输出设置为恒定最小值 (-1)。常数_最大值:输出设置为恒定最大值 (+1)。电机 1至电机 12:输出显示电机。只显示机身允许使用的电机。伺服 1至伺服器 8:伺服输出。根据机身情况,这些输出还被赋予了特定含义,例如"倾斜伺服"、"左副翼"。机外吸入器 1至机外吸入器 6: MAVLink 有效载荷输出.起落架:输出为起落架。降落伞:输出为降落伞。正常使用时输出最小值,触发故障安全时输出最大值。RC 卷:输出为 RC 的直通辊 (RC_MAP_ROLL 将 RC 通道映射到该输出)。使用 .RC 螺距:输出是从 RC (RC_MAP_PITCH 将一个 RC 通道映射到该输出)。遥控节流阀:输出为 RC 的直通节流阀 (rc_map_throttle 将一个 RC 通道映射到该输出)。RC Yaw:输出为来自 RC 的偏航信号 (RC_MAP_YAW 将一个 RC 通道映射到该输出)。遥控襟翼:输出为遥控襟翼 (RC_MAP_FLAPS 将一个 RC 通道映射到该输出)。RC AUXn至RC AUX1:输出用于 由 RC 穿越触发的任意有效载荷万向节滚动:输出控制万向节滚动。万向节间距:输出控制万向节俯仰。万向偏航:输出控制万向节俯仰。
以下功能只能应用于 FMU 输出端:
相机触发器:用于触发摄像机的输出。当TRIG_MODE==0.通过TRIG_*参数相机捕捉:输入以获取图像捕获通知。当 cam_cap_fback==0.通过CAM_CAP_*参数PPS 输入:每秒脉冲输入捕捉。用于 GPS 同步。启用时pps_cap_enable==0
备注
此列表在 PX4 v1.13 版中是正确的。这些函数的源代码定义在 /src/lib/mixer_module/output_functions.yaml (打开新窗口).
# 执行器测试
执行器测试 右下角的滑块部分提供了可用于测试(和确定)致动器和电机设置的滑块。每个输出都有一个滑块。 致动器输出 截面。下面的滑块示例显示了典型 VTOL 倾转旋翼机机身的剖面图。
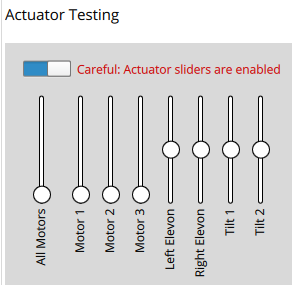
该部分有一个 启用滑块 在使用滑块之前,必须先切换开关。滑块可在整个运动范围内为电机/伺服器提供动力,并可快速恢复到解除和最小位置。
备注
切换 启用滑块 开关,执行器/电机不会做任何事情,直到相应的滑块被 感触.这是一项安全功能,可防止开关启用后电机突然运动。
滑块可用于验证以下内容:
- 执行器(电机、控制面等)分配给预期输出。
- 电机在
撤膛PWM 输出值 - 电机几乎不转
最低限度PWM 输出值。 - 电机提供 正推力 按预期方向
- 控制面板处于正确的空闲位置,以便
撤膛输出值 - 控制面的移动方向在 控制面公约
- 电机倾斜伺服器处于正确的空闲位置,以便
撤膛输出值 - 电机倾斜舵机的运动方向在 "电机倾斜舵机 "中定义。 倾角伺服公约
# 输出分配和配置
输出被分配给功能,并在 致动器输出 部分,而 执行器测试 滑块通常用于确定要输入的适当配置值:
- 将电机连接到 PWM 输出端的 多旋翼 载具可以使用 识别和分配电机 按钮,半自动执行电机分配。
- 电机和执行器的输出分配均可通过滑块完成/检查(见图 1)。 输出分配(手动)).
- 所有输出的撤膛、最小和最大设置也可以通过滑块来确定。这显示为 电机分配与配置, 控制面板设置, 倾斜伺服器设置
# 多旋翼飞行器 PWM:电机分配
您可以使用 识别和分配电机 按钮,通过半自动程序将电机分配到 PWM 输出。
备注
这是最简单的电机分配方法,但目前仅适用于以下设备上的电机 多旋翼飞行器 连接到 PWM 输出(UAVCAN 输出和其他框架类型不支持此功能)。在其他框架上,您可以按照 输出分配(手动).
警告
在分配输出或进行任何测试之前,从电机上取下螺旋桨。
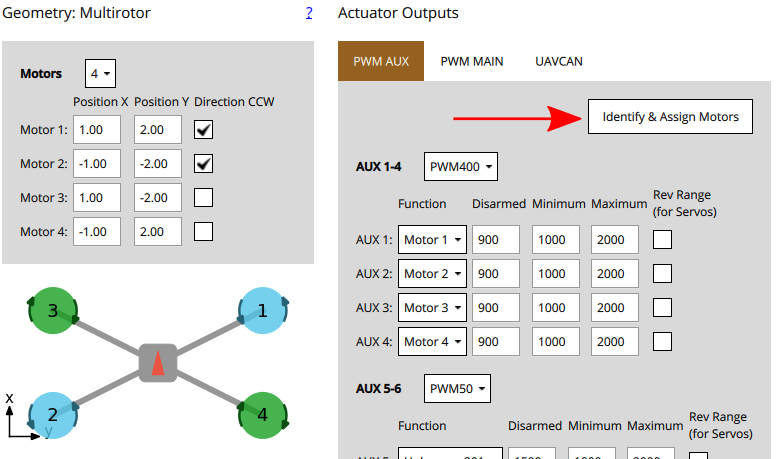
点击按钮后,QGC 会向电机发送指令,使其旋转。要将该电机分配到输出端,只需选择屏幕中显示的相应电机即可。然后,QGC 将旋转下一个电机供您分配,依此类推。
说明:
设置电机的几何形状,以匹配车架上的电机。
选择要分配电机的 PWM 选项卡。
点击 识别和分配电机 按钮。
一个电机将开始旋转(点击 再次旋转电机 如果它停止旋转的速度太快而无法注意到)。
在几何图形部分选择相应的电机。
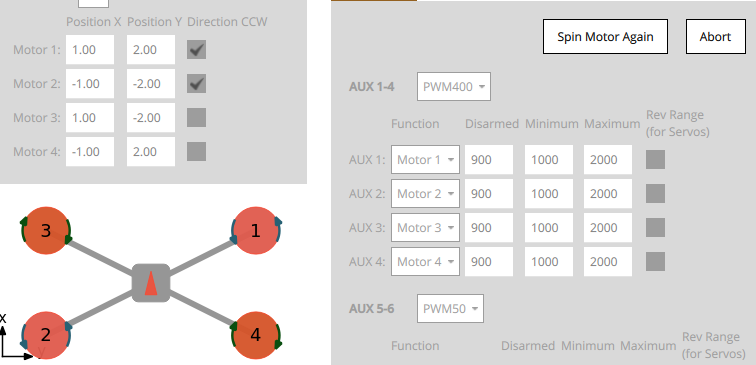
分配完所有电机后,工具将为输出设置正确的电机映射,然后退出。
# 输出分配(手动)
警告
在分配输出或进行任何测试之前,从电机上取下螺旋桨。
电机和伺服系统的执行器输出均可以 人工 中的滑块进行分配。 执行器测试 节。
分配执行机构:
- 首先为您认为合适的输出分配功能 有可能 是正确的 致动器输出 节。
- 切换 启用滑块 换入 执行器测试 节。
- 移动要测试的执行机构的滑块:
- 应将发动机移至最小推力位置。
- 舵机应移动到中间位置附近。
- 检查载具上移动的致动器。这应该与您的几何形状的制动器位置相匹配(即 机身参考 显示了一些标准机身的马达位置)。
- 如果执行机构移动正确,则进入下一步。
- 如果执行器移动错误,则调换输出分配。
- 如果没有任何移动,则在中途增加滑块,必要时再增加滑块。如果之后没有任何动作,则可能是输出未连接、电机未通电或输出配置错误。您需要排除故障(或许可以尝试其他执行器输出,看看是否有任何移动)。
- 将滑块放回 "解除警报 "位置(电机位于滑块底部,舵机位于滑块中央)。
- 对所有执行器重复上述操作
# 电机配置
电机配置为电机设置输出值:
- 解除时不会旋转(在
撤膛PWM 输出值) - 勉强在
最低限度PWM 输出值 - 与 正推力 按预期方向
每个电机
- 将电机滑块向下拉,使其卡在底部。在此位置,电机设置为输出。
解除上膛价值。- 确认电机在此位置不旋转。
- 如果电机旋转,则减小相应的 PWM 电流。
解除上膛中的值 致动器输出 的水平以下。
- 慢慢向上移动滑块,直到它卡在 最低限度 位置。在此位置,电机的输出被设置为
最低价值。确认电机在此位置的旋转速度非常慢。
如果电机不转或转得太快,则需要调整相应的 PWM 值。
解除上膛中的值 致动器输出 以至于电机几乎无法转动。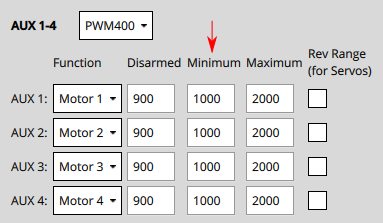
备注
对于 DShot 输出,这不是必需的
- 将滑块值增加到可以验证电机旋转方向正确的水平,并在预期方向上提供正推力。
# 控制面板设置
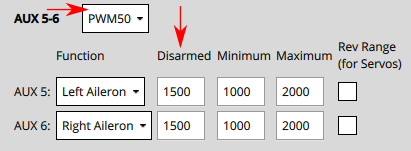
首先设置 帧频 的最大值。该值通常设置为舵机支持的最大值。下面我们将展示如何将其设置为 PWM50(最常见的值)。
备注
您几乎肯定需要将脉冲频率从默认的 400Hz 改为 400Hz,因为很少有人支持(如果不支持,伺服通常会发出"奇怪"的噪音)。如果您使用的是 PWM 伺服器,PWM50 则更为常见。如果使用高频率伺服 的确 根据需要,DShot 可提供更高的价值。
每个控制面:
- 设置
解除上膛值,使表面在撤膛时保持中立位置。通常约为1500用于 PWM 伺服系统。 - 向上移动曲面的滑块(正指令),并确认其移动方向与 控制面公约.
- 如果控制面朝相反方向移动,请单击
转速范围复选框来反转范围。
- 如果控制面朝相反方向移动,请单击
- 再次将滑块移至中间位置,检查控制面是否对准机翼的中立位置
如果没有对齐,可以设置 修剪 控制面的值。
备注
在
修剪几何图形面板的设置,通常需要反复试验。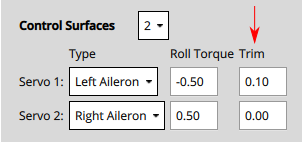
为控制面设置微调后,将其滑块从中间移开,松开后再回到解除(中间)位置。确认表面处于中立位置。
请注意 必须 移动滑块 即使已经处于中间位置 (移动后才开始接收指令)。
备注
另一种不使用滑块的测试方法是设置 com_prearm_mode 参数改为 始终如一:
- 这样即使在解除载具上膛时也能控制舵机,并不断将微调设置应用于控制面
- 您可以尝试设置不同的修剪值并检查对齐情况,然后确定您满意的值。
# 倾斜伺服器设置
首先设置 帧频 的最大值。通常情况下,该值应设置为舵机支持的最大值。以下设置为 PWM50(最常用值)。请注意,这部分设置与上述控制面的设置相同。
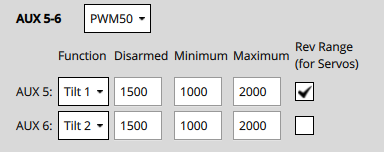
每个倾斜伺服器
设置
解除上膛值(例如1000或2000对于 PWM 伺服器而言),这样伺服器就会按照预期的方向定位。 撤膛.将伺服滑块置于最低位置,并验证正值的增加将指向舵机。
最小倾角时的角度(在几何体部分中定义)。将伺服滑块置于最高位置,并验证正电机推力将指向
最大倾斜时的角度(如几何体部分所定义)。
# 其他说明
- 如果使用安全按钮,则必须在执行机构测试之前按下安全按钮。
- 仍可使用断电开关立即停止电机。
- 在改变相应的滑块之前,舵机不会实际移动。
- 参数 com_mot_test_en 可用于完全禁用执行机构测试。
- 在外壳上 致动器测试 也可用于执行器测试。
- 在飞行过程中,VTOL 会自动关闭指向上方的电机。 固定翼飞行:
- 标准 VTOL:定义为多旋翼飞行器的电机将关闭
- 倾斜伺服器 :没有相关倾斜伺服器的电机将关闭
- 尾随者在固定翼飞行中不关闭任何发动机
# 逆转电机
电机必须按照配置的几何图形(";方向 CCW复选框)。如果任何电机的转动方向不正确,则必须将其反转。
有几种选择:
如果将 ESC 配置为 DShot 您可以通过用户界面 (设置旋转方向 按钮)。请注意,无法查询当前方向,因此您可能需要同时尝试这两个选项。
交换 3 条电机电缆中的 2 条(哪一条并不重要)。
备注
如果电机不是通过子弹头连接器连接,则需要重新焊接(这也是首选 DShot ESC 的原因之一)。
← 发动机 自动调整飞行稳定参数 →