# 自动调整飞行稳定参数
自动调整可自动调整 PX4 速率和姿态控制器,这两个控制器是实现稳定和灵敏飞行最重要的控制器(其他调整更多是可选的)。目前多旋翼飞行器、固定翼飞行器和混合 VTOL 固定翼飞行器都启用了自动调整功能。
调校只需进行一次,除非您使用的载具已经由制造商进行过调校(之后没有进行过改装),否则建议您进行一次调校。
备注
固定翼飞行器未启用 QGroundControl 自动调整 UI - 请参阅 qgroundcontrol#10194 (打开新窗口) (但它适用于固定翼飞行中的 VTOL 飞行器)。您可以通过设置参数 FW_AT_START.
警告
自动调整在飞行过程中进行。机身的飞行性能必须足以应对中等程度的干扰,并应受到密切关注:
- 测试您的载具是否 足够稳定,可进行自动调整.
- 随时准备通过移动遥控杆中止自动调整过程。
- 确认载具在调试后飞行良好。
# 预调整参数测试
在运行自动调整之前,飞行器必须能够飞行并充分稳定。该测试可确保飞行器在位置控制模式下安全飞行。
备注
期间 机身设置 您应该已经选择了与您的载具最匹配的机架。这通常会调整得足以飞行,而且它 可以 还必须经过充分的调整,以运行自动调整功能。
确保载具足够稳定,以便进行自动调整:
- 执行正常的飞行前安全检查清单,确保飞行区畅通并有足够的空间。
- 起飞并准备测试
- 使用遥控发射器的滚动杆进行以下操作,将飞行器倾斜几度即可: 向左滚动> 向右滚动> 居中 (整个操作过程大约需要 3 秒钟)。飞行器应在 2 次摆动内稳定下来。
- 重复该操作,每次都以更大的振幅倾斜。如果飞行器能在 ~20 度的 2 次摆动范围内保持稳定,则进入下一步。
- 在俯仰轴上重复同样的操作。同上,从小角度开始,确认飞行器能在 2 次摆动范围内自行摆动后,再增加倾斜角度。
如果无人机能在 2 次振荡内稳定下来,就可以进入自动调整程序。
如果没有,请转到 故障排除 部分,该部分介绍了如何进行最基本的手动调校,以便为自动调校做好准备。
# 自动调整程序
自动调整飞行稳定参数序列必须在以下条件下执行 有足够空间的安全飞行区.大约需要 40 秒 (19 至 68 秒之间).为获得最佳结果,我们建议在风平浪静的天气条件下进行测试。
备注
操作员可随时通过移动遥控控制器上的滚动/俯仰摇杆中止序列。
测试步骤如下
执行 预调测试.
使用遥控控制起飞,准备测试:
在 QGroundControl 中,打开菜单: 载具设置 > PID 调节
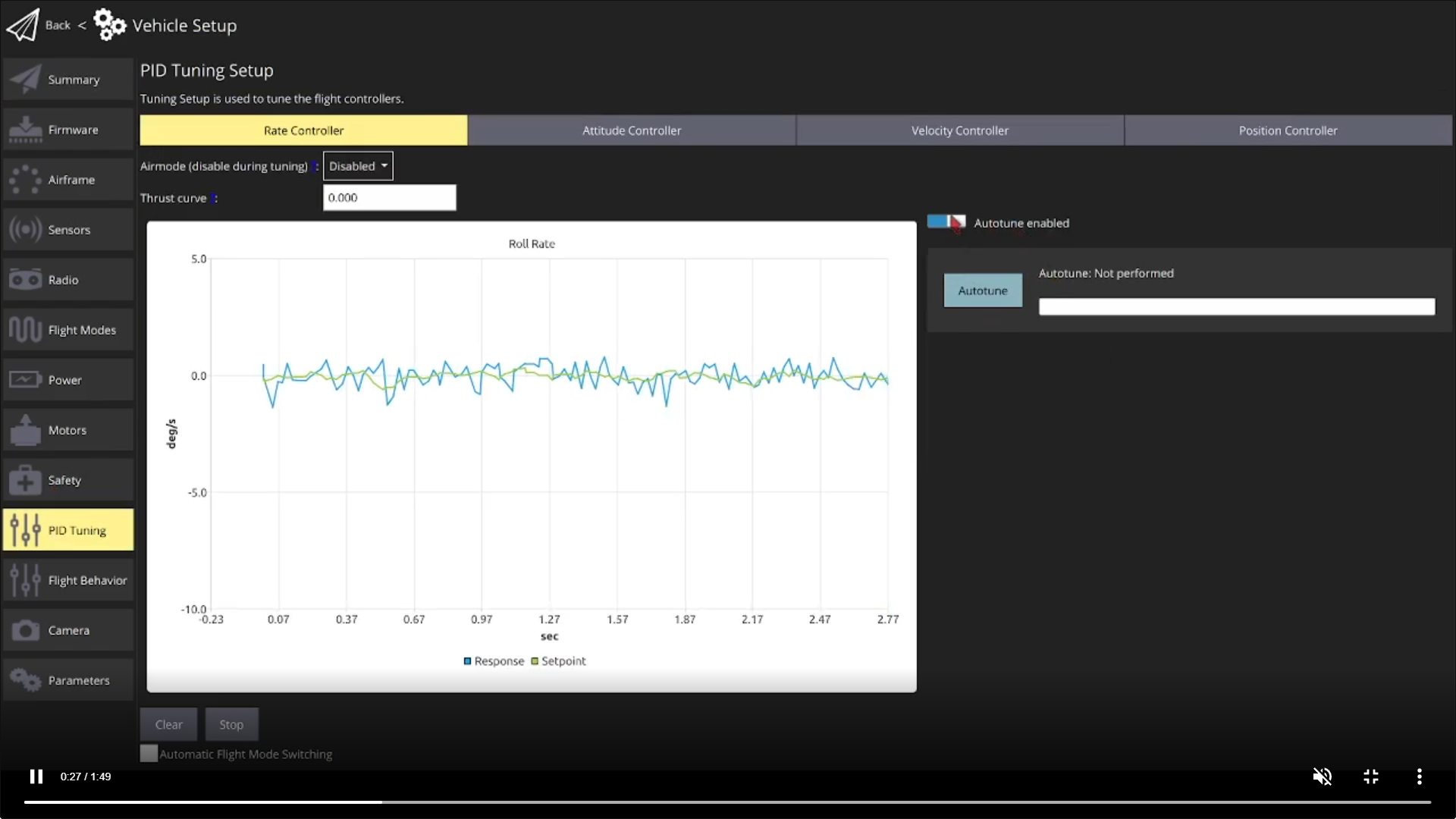
选择 费率控制器 或 姿态控制仪 标签。确保 已启用自动调整飞行稳定参数 按钮已启用(这将显示 自动调整飞行稳定参数 按钮并取下手动调整参数选择器)。
停止移动操纵杆,点击 自动调整飞行稳定参数 按钮。阅读弹出的警告并点击 好的 开始调整。
无人机首先会开始执行快速翻滚动作,然后是俯仰和偏航动作。进度显示在进度条中,旁边是 自动调整飞行稳定参数 按钮。
进行调整:
- 固定翼 调整将立即/自动应用,并在飞行中进行测试(默认情况下)。然后,PX4 将进行 4 秒钟的测试,如果检测到问题,则恢复新的调整。
- 多旋翼机 手动着陆和撤膛,以应用新的调整参数。小心起飞,手动测试飞行器是否稳定。
如果出现任何强烈振荡,请立即降落,并按照《飞行手册》中的说明操作。 故障排除 见下文。
补充说明
- VTOL: 混合动力 VTOL 固定翼飞行器必须调整两次,在 多旋翼 模式下按照多旋翼飞行器指令,在 FW 模式下按照固定翼飞行器指令。
- 多旋翼飞行器: 上述说明将载具调至 高度模式.您可以在 起飞模式 收听 位置模式 如果载具是 已知 在这些模式中保持稳定。
- 固定翼 自动调整也可以在 高度模式 或 位置模式.不过,在直飞时进行测试需要更大的安全区域进行调试,而且调试结果也不会明显改善。
- 调整是在空中进行还是在着陆后进行,这取决于 使用参数配置.
# 故障排除
# 在自动调整飞行稳定参数之前执行测试动作时,无人机会摆动。
- 缓慢摆动(每秒摆动 1 次或更慢):这通常发生在大型平台上,意味着姿态环路与速率环路相比速度过快。
- 多旋翼飞行器: 减少 MC_ROLL_P 和 MC_PITCH_P 以 1.0 为单位
- 固定翼飞机 增加 FW_R_TC, FW_P_TC, FW_Y_TC 以 0.1 为单位
- 快速振荡(每秒超过 1 次振荡):这是因为速率环的增益过高。
# 自动调整程序失败
如果无人机在自动调整过程中移动不够,系统识别算法可能无法找到正确的系数。增加 fw_at_sysid_amp, mc_at_sysid_amp 以 1 为单位,再次触发自动调整。
# 自动调整飞行稳定参数后无人机会摆动
由于延迟、饱和、回转速率、机身灵活性等数学模型未包含的影响,环路增益可能过高。要解决这个问题,请按照以下步骤操作 当无人机在预调测试中摆动时.
# 我还是无法使用
尝试使用相应的指南进行手动调整参数:
- 多旋翼飞行器 PID 调整指南 (手动/简单)
- 多旋翼飞行器 PID 调整指南 (高级/详细)
- 固定翼 PID 调整指南
# 参数
默认情况下,多旋翼 飞行器在应用参数前着陆,而 FW 飞行器在空中应用参数,然后测试控制器是否正常工作。可以使用 MC_AT_APPLY 和 FW_AT_APPLY 参数:
0:不应用增益。如果用户希望在不直接使用自动调整算法的情况下检查其结果,则可将其用于测试目的。1注意:撤膛后应用增益(多旋翼飞行器默认)。然后,操作员可以在起飞时仔细测试新的调整。2:立即应用(固定翼默认值)。应用新的调整后,干扰将被发送到控制器,并在接下来的 4 秒钟内对稳定性进行监控。如果控制环不稳定,控制增益会立即恢复到之前的值。如果测试通过,驾驶仪就可以使用新的调整。
固定翼飞行器(仅限)可以使用 FW_AT_AXES 位掩码参数:
- 位掩码
0:滚动(默认) - 位掩码
1:音调(默认) - 位掩码
2偏航
# 开发人员/SDK
使用 mav_cmd_doo_autotune_enable (打开新窗口) MAVLink 命令。
在编写本报告时,会定期重新发送信息,以轮询 PX4 的进展情况。 命令返回 包括操作正在进行的结果以及进度百分比。当进度达到 100% 或载具着陆并解除警报时,操作完成。
备注
这不是符合 MAVLink 标准的 命令协议长运行命令 (打开新窗口).由于协议不允许轮询,因此 PX4 应按进度进行流式传输。
MAVSDK 尚不支持该功能。
# 背景/细节
PX4 的用途 PID 控制器 (率、姿态、速度和位置)来计算将载具从当前估计状态移动到所需设定点所需的输出。为了使飞行器获得最佳性能,必须对控制器进行良好的调整。特别是,如果速率控制器调试不当,则所有模式下的飞行稳定性都会降低,而且从干扰中恢复的时间也会更长。
一般来说,如果使用 机身配置 那么飞行器就能飞行。不过,除非配置与您的硬件完全匹配,否则您应该调整速率和姿态控制器。调整速度和位置控制器并不那么重要,因为它们受飞行器动态的影响较小,类似机身的默认调整配置通常就足够了。
自动调整提供了一种自动调整速率和姿态控制器的机制。它可用于调整固定翼和多旋翼飞行器,以及作为多旋翼或固定翼飞行时的 VTOL 飞行器(模式之间的转换必须手动调整)。理论上,它应该适用于其他具有速率控制器的飞行器类型,但目前只支持上述类型。
自动调整功能对 PX4 支持的多旋翼飞行器和固定翼飞行器配置都很有效,前提是机架不太灵活(参见 更多信息).
飞行器必须以高度稳定模式飞行 (高度模式, 保持模式或 位置模式).飞行算法池将在每个轴上对飞行器施加一个小干扰,然后尝试计算新的调整参数。对于固定翼飞行器,新的调整参数默认在空中应用,然后飞行器会测试新的设置,如果控制器不稳定,则恢复调整。对于多旋翼飞行器,飞行器着陆并在解除后应用新的调整参数;驾驶仪随后应小心起飞并测试调整。
调整过程大约需要 40 秒 (19 至 68 秒之间).可以使用 参数.
# 常见问题
# 支持哪些帧类型?
多旋翼飞行器、固定翼飞行器和混合 VTOL 固定翼飞行器均可启用自动调整功能。
虽然该功能尚未在其他帧类型中启用,但从理论上讲,它可以在任何使用速率控制器的帧中使用。
# 自动调整是否适用于所有支持的机型?
自动调整用于估算无人机动态的数学模型假定它是一个线性系统,各轴之间没有耦合(SISO),复杂程度有限(2 极 2 零)。如果真实的无人机与这些条件相差太远,模型将无法代表无人机的真实动态。
在实践中,只要机架不太灵活,自动调整一般对固定翼和多旋翼飞行器都很有效。
# 自动调整需要多长时间?
每个轴的调整参数时间为 5 秒至 20 秒(如果在 20 秒内无法完成调整参数,则终止调整参数)+ 每个轴之间停顿 2 秒+ 如果在空气中应用新增益,则测试时间为 4 秒。
多旋翼飞行器必须调整所有三个轴,默认情况下不会在空中测试新的增益。因此,调整需要 19 秒 (5 + 2 + 5 + 2 + 5)和 64 秒(20x3 + 2x2).
默认情况下,固定翼飞行器会对所有三个轴进行调整,然后在空中测试新的增益。因此,测试时间范围在 25 秒 (5 + 2 + 5 + 2 + 5 + 2 + 4)和 70 年代(20x3 + 3x2 + 4).
但请注意,上述设置为默认设置。多旋翼飞行器可以选择在空中进行测试,而固定翼飞行器可以选择不在空中进行测试。此外,固定翼飞机可以选择较少的轴。
据传闻,两辆车通常都需要 40 秒左右。
# 另见
- 多旋翼飞行器 PID 调整指南 (手动/简单)
- 多旋翼飞行器 PID 调整指南 (高级/详细)
- 固定翼 PID 调整指南