# DJI FlameWheel 450 + CUAV V5+ 构建
本主题提供了构建套件和配置 PX4 的完整说明,可使用 QGroundControl.
关键信息
- 框架 DJI F450
- 飞行控制器: CUAV V5+
- 组装时间(约): 90 分钟(框架 45 分钟,自动驾驶仪安装/配置 45 分钟)
# 材料清单
该构建所需的组件有
- 飞行控制器: CUAV V5+ (打开新窗口):
- 全球定位系统: CUAV NEO V2 GPS (打开新窗口)
- 电源模块
- 框架 DJI F450 (打开新窗口)
- 推进器 DJI Phantom 内置螺母升级螺旋桨 9.4x5 (打开新窗口)
- 电池 特耐吉大容量 5200mAh 3S 12C 锂聚合物电池组 w/XT60 (打开新窗口)
- 遥测 Holybro 无线电遥测收发器 V3
- 遥控接收器: FrSky D4R-II 2.4G 4CH ACCST 遥测接收器 (打开新窗口)
- 发动机 大疆 E305 2312E 马达(960kv,CW) (打开新窗口)
- 电调好盈 XRotor 20A APAC 无刷电调 3-4S 用于遥控多旋翼飞行器
此外,我们还使用了 FrSky Taranis 控制器。您还需要扎带、双面胶带和烙铁。
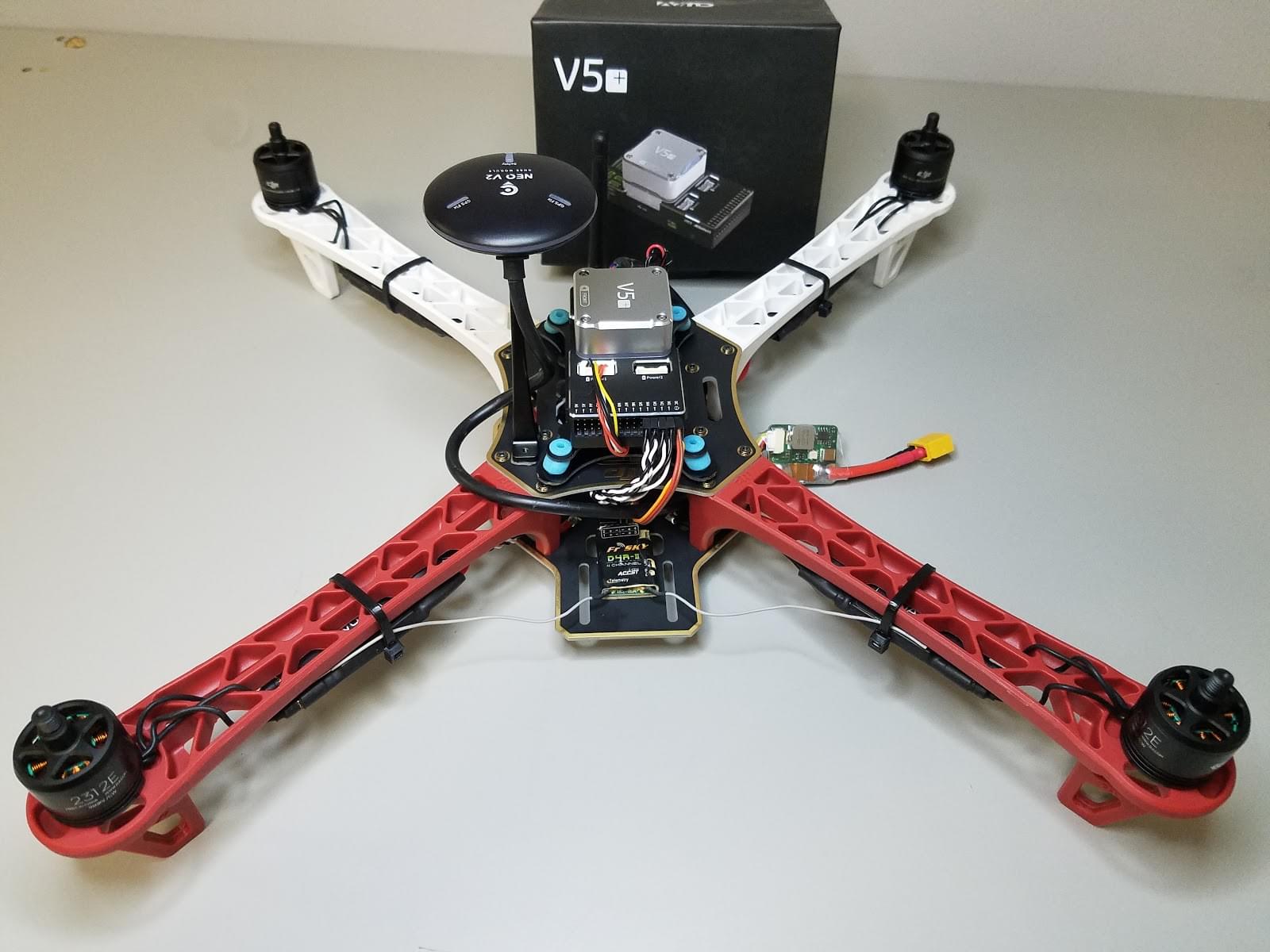
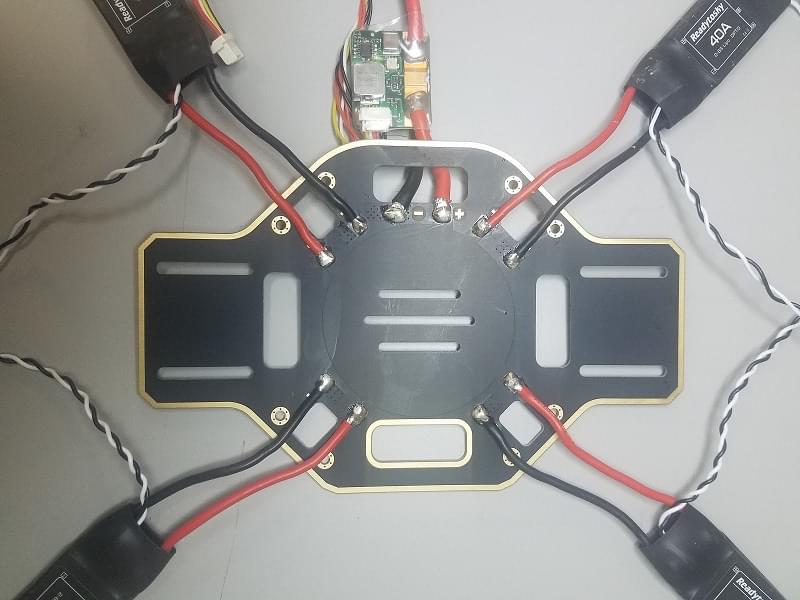
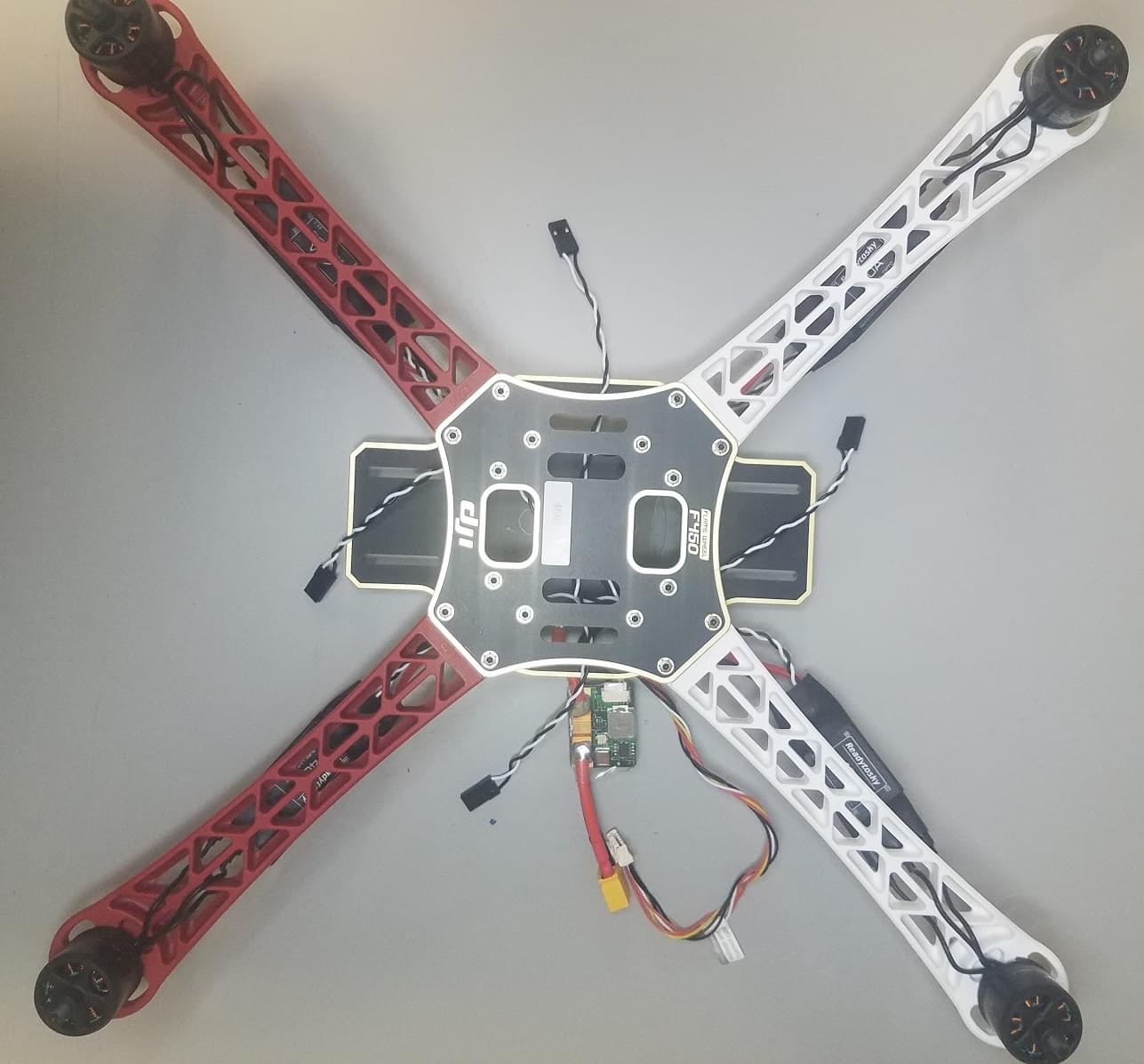
下图显示了框架和电子元件。

# 硬件
# 框架
本节列出了机架的所有硬件。
| 说明 | 数量 |
|---|---|
| DJI F450 底板 | 1 |
| DJI F450 顶板 | 1 |
| 带起落架的 DJI F450 支腿 | 4 |
| M3*8 螺钉 | 18 |
| M2 5*6 螺钉 | 24 |
| 魔术贴电池带 | 1 |
| DJI Phantom 内置螺母升级螺旋桨 9.4x5 | 1 |

# CUAV V5+ 软件包
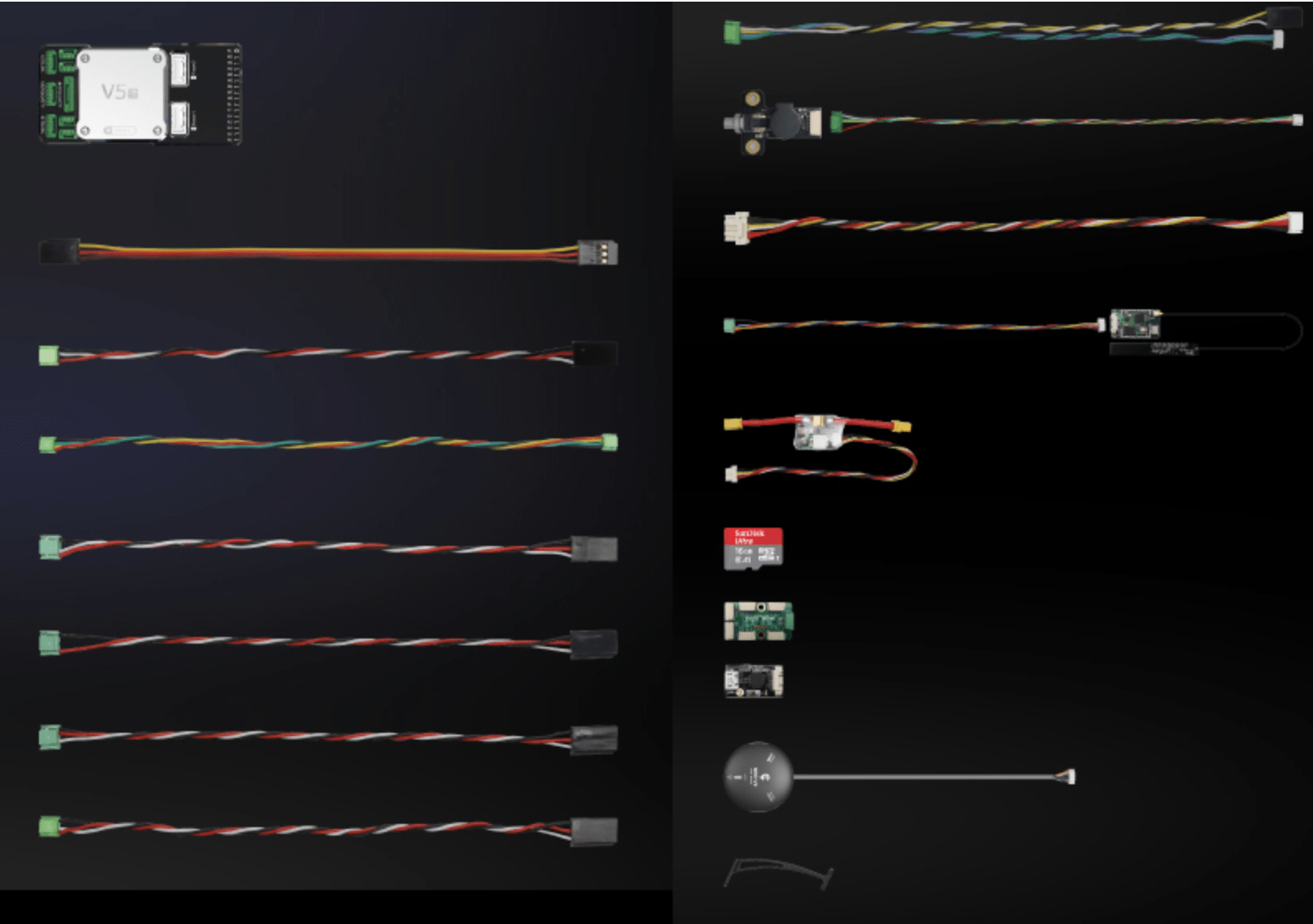
本节列出了 CUAV v5+ 软件包中的组件。
| 说明 | 数量(默认包装) | 数量(+GPS 包) |
|---|---|---|
| V5+ 自动驾驶仪 | 1 | 1 |
| 杜邦电缆 | 2 | 2 |
| I2C/CAN 电缆 | 2 | 2 |
| ADC 6.6 电缆 | 2 | 2 |
| SBUS 信号电缆 | 1 | 1 |
| IRSSI 电缆 | 1 | 1 |
| DSM 信号线 | 1 | 1 |
| ADC 3.3 电缆 | 1 | 1 |
| 调试电缆 | 1 | 1 |
| 安全开关电缆 | 1 | 1 |
| 电压放大器;电流电缆 | 1 | 1 |
| PW-Link 模块电缆 | 1 | 1 |
| 电源模块 | 1 | 1 |
| 闪迪 16GB 存储卡 | 1 | 1 |
| 12C 扩展板 | 1 | 1 |
| TTL 板 | 1 | 1 |
| NEO GPS | - | 1 |
| GPS 支架 | - | 1 |
# 电子产品
| 说明 | 数量 |
|---|---|
| CUAV V5+ | 1 |
| CUAV NEO V2 GPS | 1 |
| Holibro 遥测技术 | 1 |
| FrSky D4R-II 2.4G 4CH ACCST 遥测接收器 | 1 |
| 大疆 E305 2312E 电机(800kv,CW) | 4 |
| 好盈 XRotor 20A 亚太无刷电子调速器 | 4 |
| 电源模块(包含在 CUAV V5+ 套件中) | 1 |
| 特耐吉大容量 5200mAh 3S 12C 锂聚合物电池组 w/XT60 | 1 |
# 所需工具
装配时使用了以下工具:
- 2.0 毫米六角螺丝刀
- 3 毫米十字螺丝刀
- 剪线钳
- 精密镊子
- 烙铁

# 装配
预计组装时间约为 90 分钟(约 45 分钟用于框架,45 分钟用于安装自动驾驶仪和配置机身)。
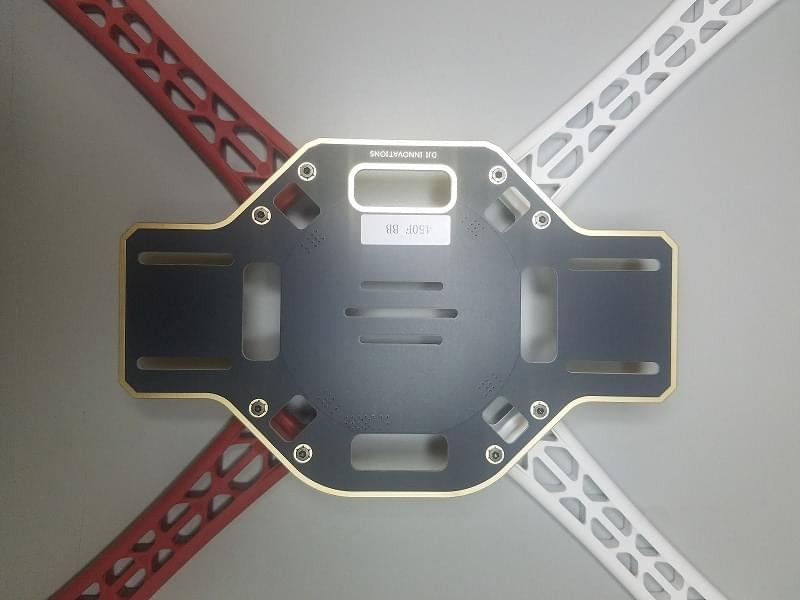
用提供的螺钉将 4 个臂固定在底板上。
将 ESC(电子调速器)焊接到电路板上,正极(红色)和负极(黑色)。
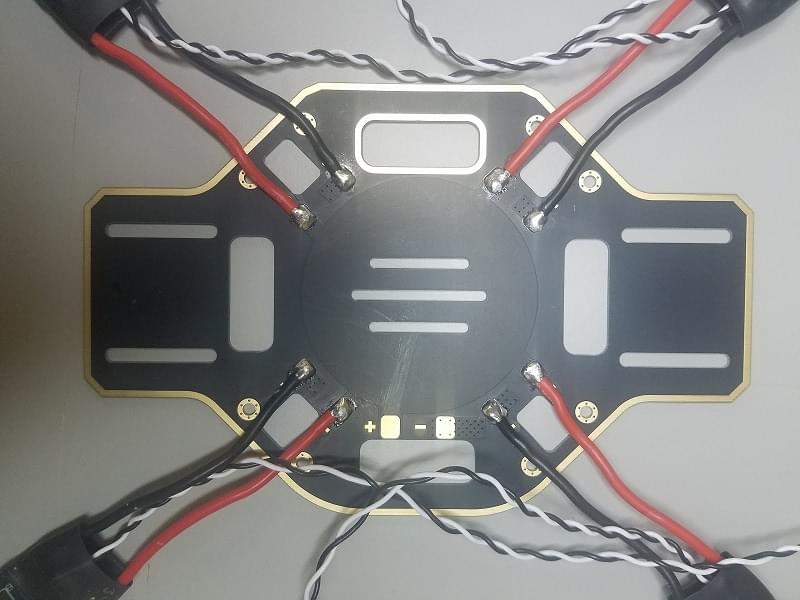
焊接电源模块的正极(红色)和负极(黑色)。
按照电调的位置将电机插入电调。

将电机安装到相应的臂上。


添加顶板(拧在支腿顶部)。
在 CUAV V5+ 飞行控制器上粘贴双面胶带(3M)(它具有内部减震功能,因此无需使用泡沫)。

用双面胶将 FrSky 接收机粘贴到底板上。

使用双面胶将遥测模块粘贴到载具底板上。


将铝支座安装到按钮板上。
插入遥测 (
TELEM1)和 GPS 模块 (全球定位系统/安全)连接到飞行控制器。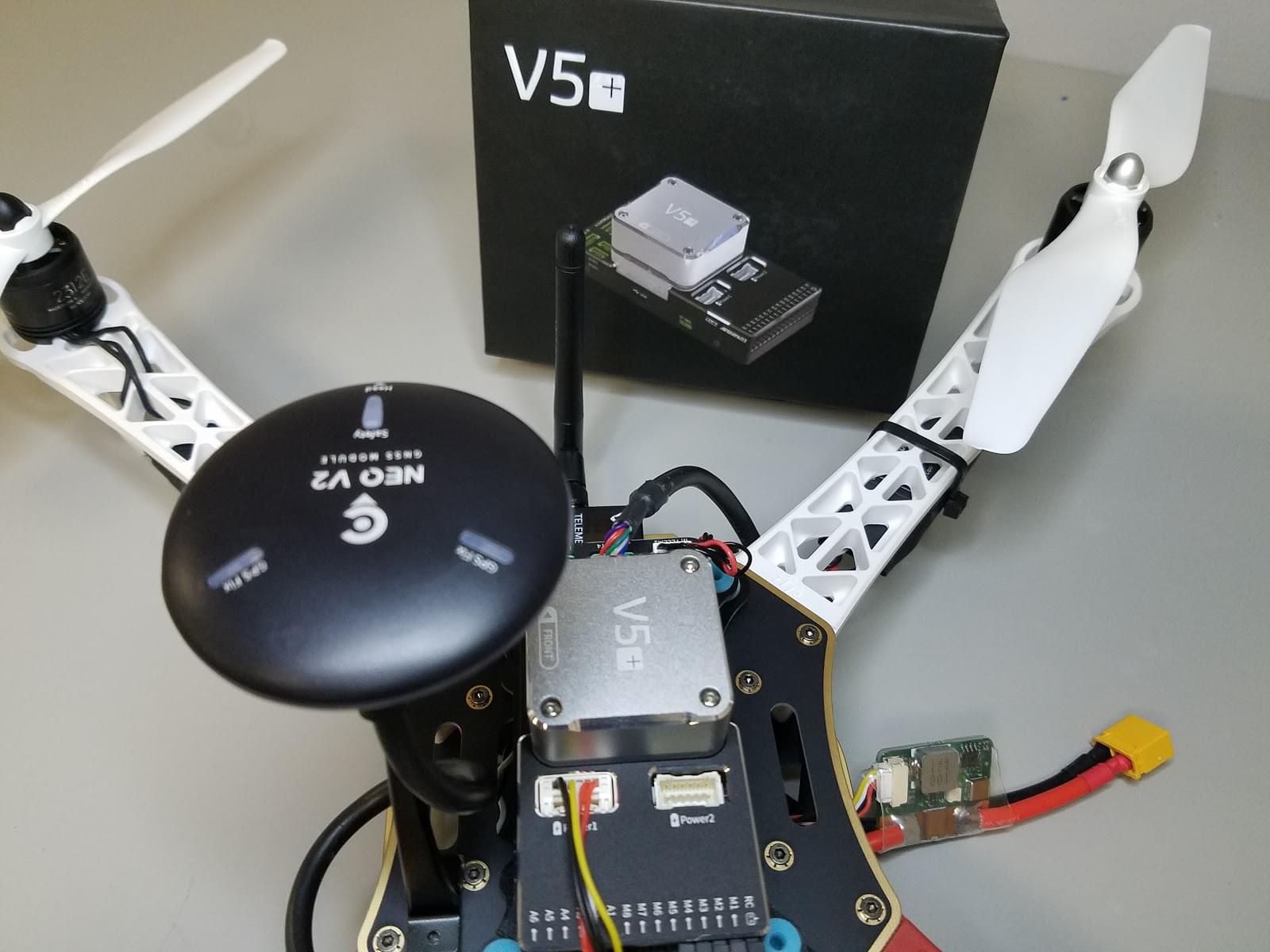

插入遥控接收器 (
RC)、所有 4 个电调 (M1-M4)和电源模块 (功率1)输入飞行控制器。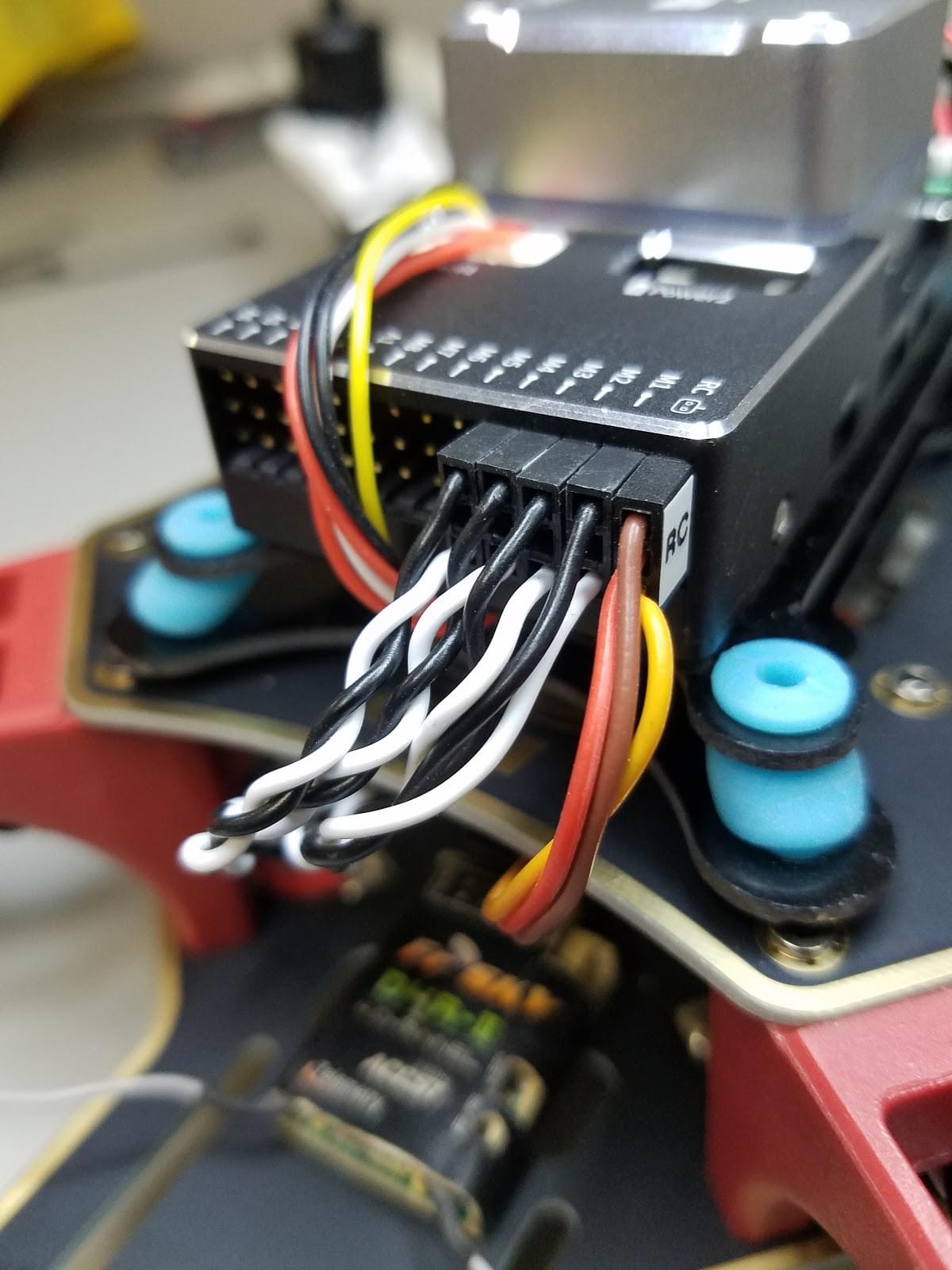
备注
电机顺序在 机身参考 > Quadrotor x
就是这样!最终的构建结果如下所示:

# PX4 配置
QGroundControl 用于安装 PX4 自动驾驶仪并为机架进行配置/调整。 下载并安装 (打开新窗口) QGroundControl 您的平台。
TIP
有关安装和配置 PX4 的完整说明,请参见 基本配置.
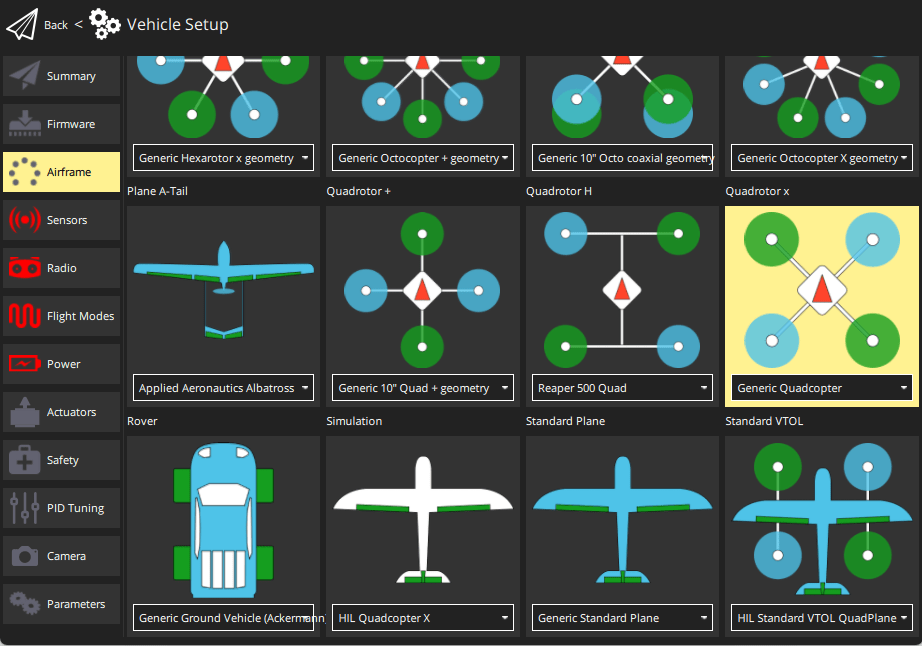
首先更新固件、机身、几何图形和输出:
-
备注
您需要选择 通用四旋翼飞行器 机身Quadrotor x > 通用四旋翼飞行器).
-
- 更新载具几何形状,使其与车架相匹配。
- 为输出端分配执行器功能,以匹配您的布线。
- 使用滑块测试配置。
然后执行必要的设置/校准:
-
备注
在这次构建中,我们设置了以下模式 稳定, 海拔高度 和 定位(POSITION) 在接收机的三向开关上(映射到单通道 - 5)。这是推荐给初学者的最基本模式。
理想情况下,你也应该这样做:
# 调音
机身选择套件 默认 机架的自动驾驶参数。这些参数可能足以满足飞行需要,但您应该对每个机架进行调整。
有关如何操作的说明,请从 自动调整飞行稳定参数.
# 视频
# 致谢
该构建日志由 Dronecode 测试飞行团队提供。