# QAV-R 5" KISS ESC Racer (Pixracer)
Lumenier QAV-R 5" FPV 竞速四旋翼飞行器是一款坚固、轻便、快速的 FPV 竞速飞行器,其机臂可拆卸。本主题提供了完整的构建和配置说明,以便将机架与 Pixracer 飞行控制器和 KISS 24A 比赛版 电调。它还提供了有关 FPV 设置(可选)的信息。
关键信息
- 框架 流明 QAV-R 5"; (打开新窗口)
- 飞行控制器: Pixracer


# 部件清单
# 飞行器(飞行所需)
- 自动驾驶仪 Pixracer 从 AUAV (打开新窗口) 包括 ESP8266 WiFi 和 ACSP5 (打开新窗口) 功率模块
- 框架 流明 QAV-R 5"; (打开新窗口)
- 发动机 流明 RX2206-11 2350KV (打开新窗口)
- ESCs: KISS 24A 比赛版 (打开新窗口)
- 道具: HQProp 5x4.5x3 化武 (打开新窗口) CCW (打开新窗口)
- GPS / Ext:M8N Pixhawk Mini(已停产) 设置和重新接线
- 电池 TATTU 1800mAh 4s 75c 锂电池 (打开新窗口)
- 遥控接收器: FrSky X4R-SB (打开新窗口)
- 遥控发射器: FrSky Taranis (打开新窗口)
- FC 减震: O 形环 (打开新窗口)
- GPS 安装: GPS 桅杆 (打开新窗口)
# FPV(可选)
- 照相机 RunCam Swift RR 版 (打开新窗口) 包括 GoPro 必备的高品质广角镜头!
- 视频交换 ImmersionRC Tramp HV 5.8GHz 600mW (打开新窗口) (已停用)。
- 视频天线: TBS Triumph 5.8GHz CP (打开新窗口) (SMA 端口适合 ImmercionRC 发射机)
- FPV 电压源插头: 公头 JST 电池尾纤 (打开新窗口)
备注
这些部件包括标准 FPV 5.8GHz 模拟调频视频的发送端。您需要一个兼容的接收器和显示设备来实际接收实时视频流。
# 组装基本框架
我按照视频中 09:25 到 13:26 的样子组装了基本中板和臂:
我将四个电机安装到机架上,缆线朝机架中心延伸。我为每个电机使用了两个随机架附带的较长的电机螺钉,并将它们安装在相距较远的两个孔中。
# 制造动力传动系统
KISS 电子调速器以其良好的性能而闻名,但也有两个缺点:
- 他们使用的软件不是开源的(与 BLHeli 不同)
- 据我所知,没有预焊导线和/或插头的硬件包
这意味着我们需要在每个电调上焊接至少 6 个焊点,但这仍然是完全值得的。
TIP
在实际焊接之前,一定要在要连接的两面都涂上焊锡。这样会方便很多,也不容易出现冷焊点。
TIP
确保使用适当规格的电缆连接从电池到电机的大电流电源。相比之下,所有信号线都可能非常细。
TIP
开始焊接前在电缆上涂上热缩管!在功能测试成功后,对电调、电源模块和自由浮动的未绝缘导线焊点进行热缩,可保护它们免受灰尘、湿气和物理损坏。
# 发动机
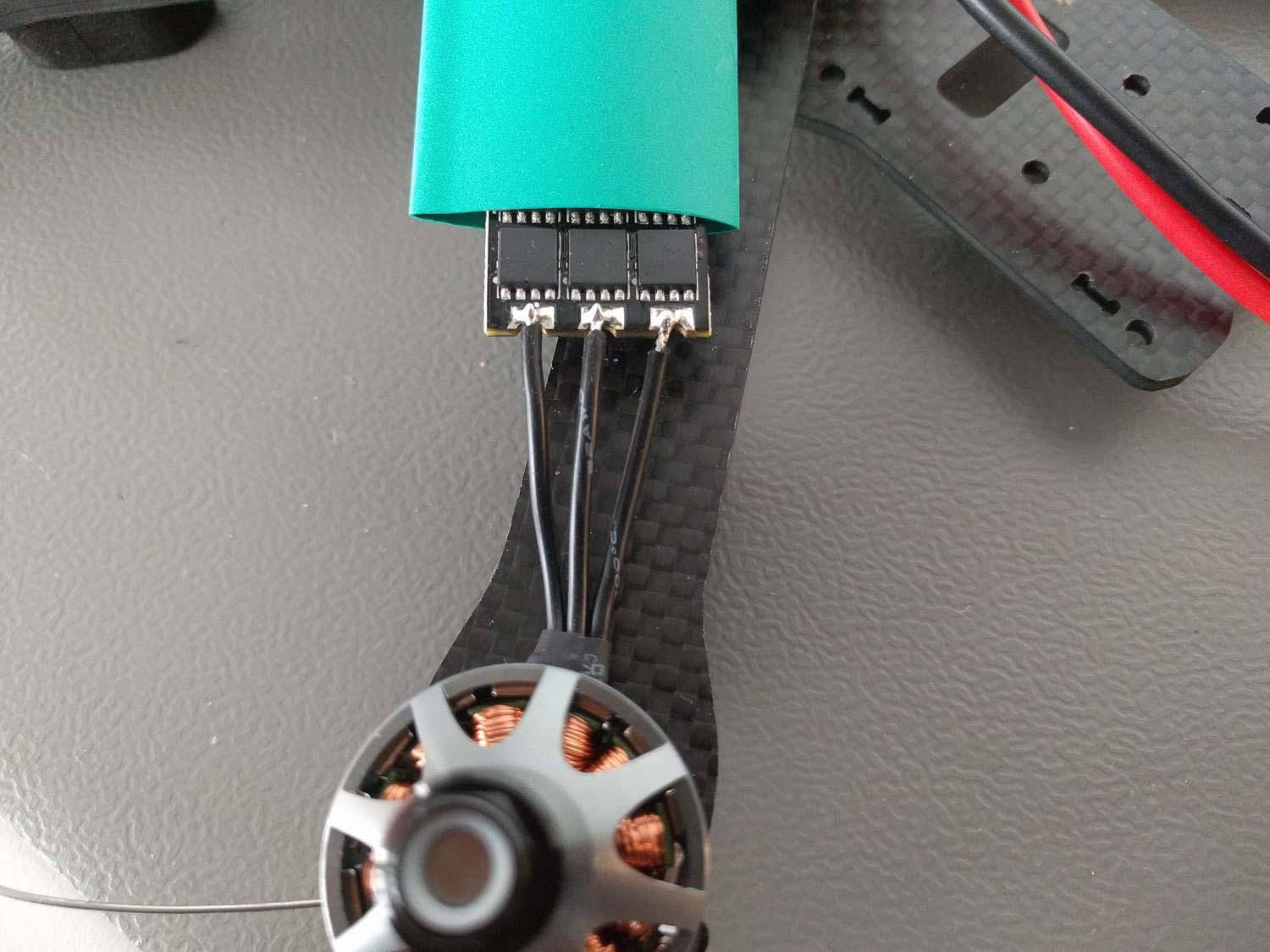
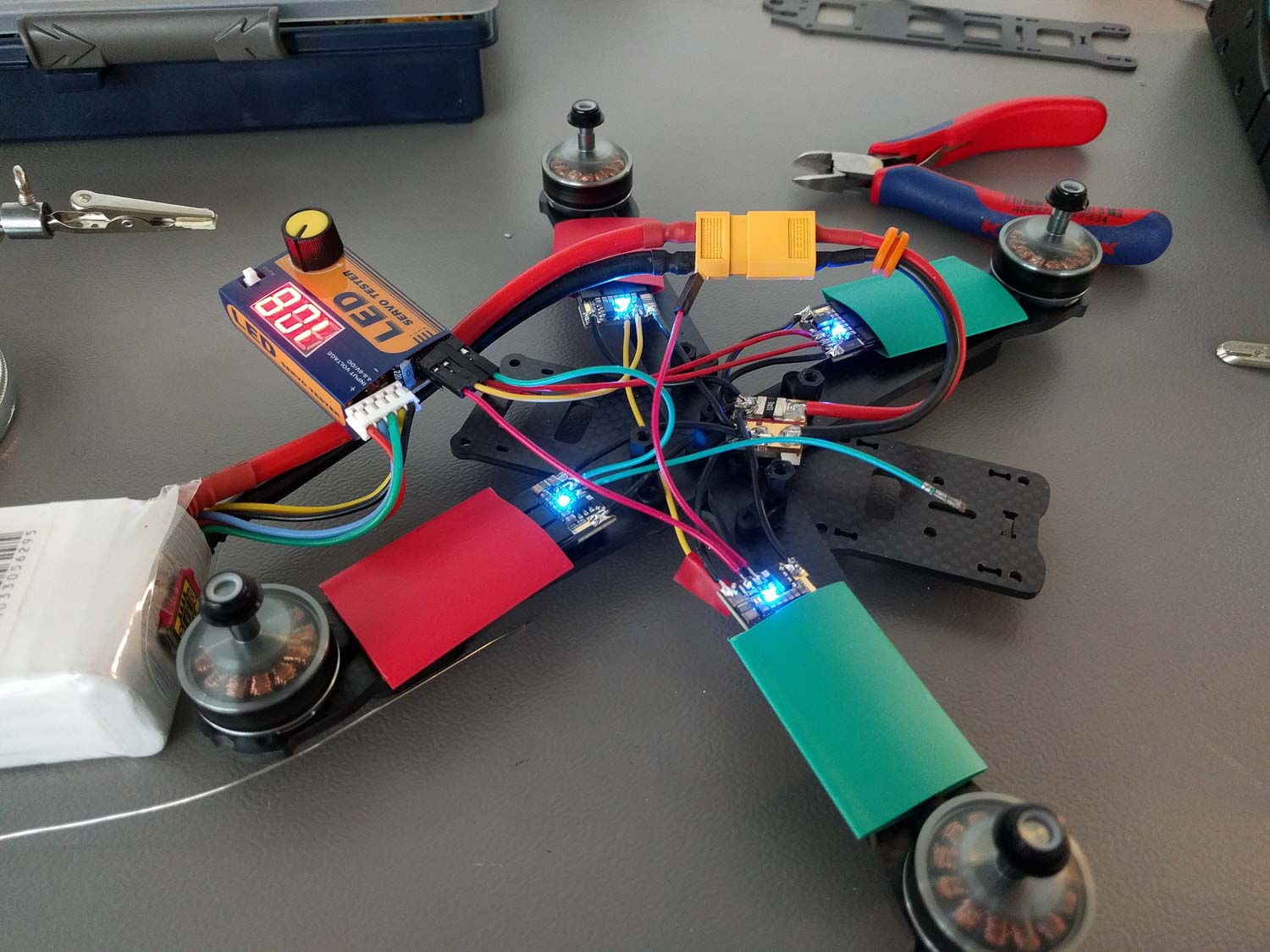
首先,我剪断了所有三根电机电缆,以便在电调安装在臂上向中心移动时直接安装,但仍留有足够的松弛空间,以便于放置部件,同时不会对电缆产生任何拉力。然后,我将它们按照从电机出来的顺序焊接到电调的输出触点上,电调的开关 MOS-FET 朝上,以便在飞行过程中获得良好的空气冷却。在测试中,选择这种电缆顺序导致所有电机都逆时针旋转。 JP1 焊接跳线 (打开新窗口) 以符合 四旋翼 x 配置.
# 电源模块
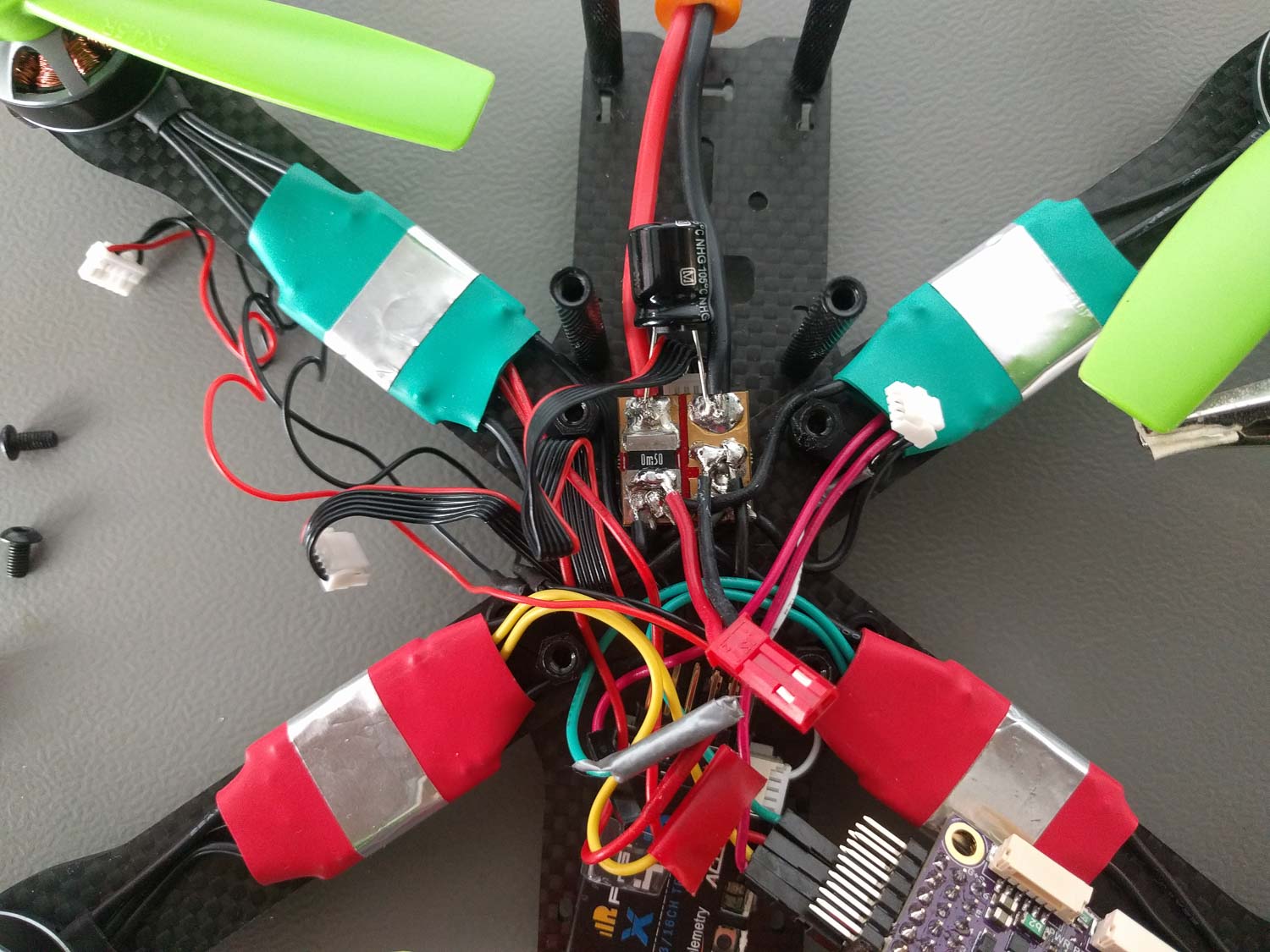
首先,我将机架上自带的 XT60 连接器焊接到标有 "电池 "字样的电池一侧。 ACSP5 电源模块 并在同一侧添加了随电源模块一起提供的极性正确的 elco 电容器。
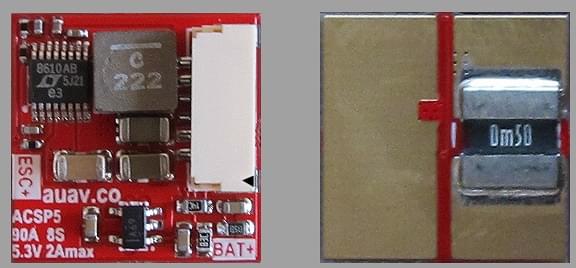
现在到了棘手的部分。我将所有四个电调电压源 + 和 - 端口焊接到电源模块电调输出侧的相应焊盘上。确保此处没有任何冷焊点,因为四轴飞行器在飞行过程中如果连接松动,后果将不堪设想。使用机架上的额外配电板会使这项工作变得容易很多,但在如此小的机架上也会占用太多空间......
TIP
如果还包括 FPV 部件,不要忘记将 JST 公电源插头焊接到电源模块的输出端。您的 FPV 设置 稍后。
# 信号电缆
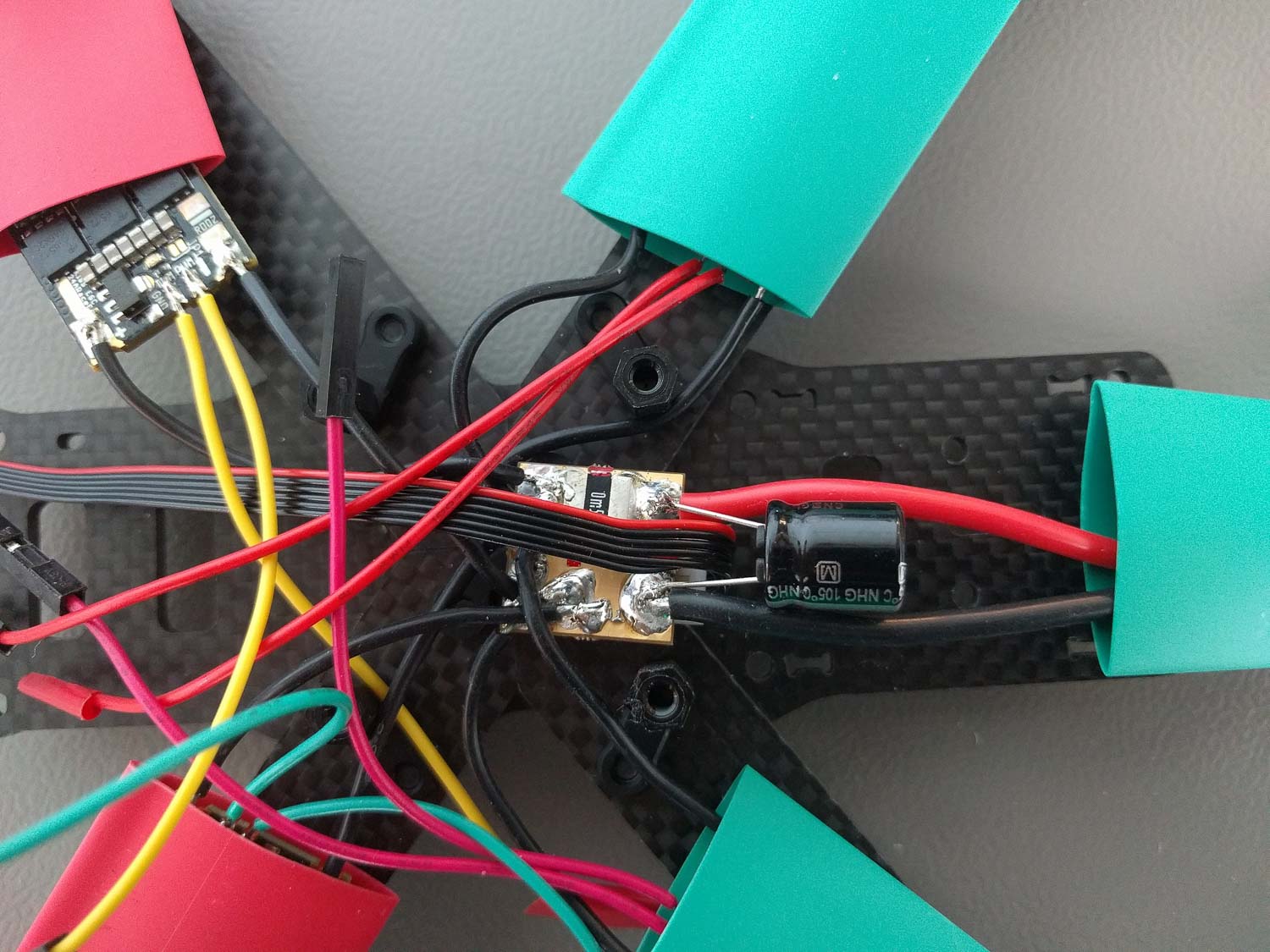
我使用了带有标准针脚接头的细电缆,并将其对半剪断,用于连接电调信号,因为这样便于以后插入 Pixracer 的针脚。只有标有 PWM 端口上的 KISS 电子调速器 (打开新窗口) 这是飞行所必需的。它们将连接到 pixracer 正确的电机信号输出端。缆线 TLM 端口用于电调遥测,由于 PX4 目前不支持所需的协议,因此我将其焊接上去以备将来使用。
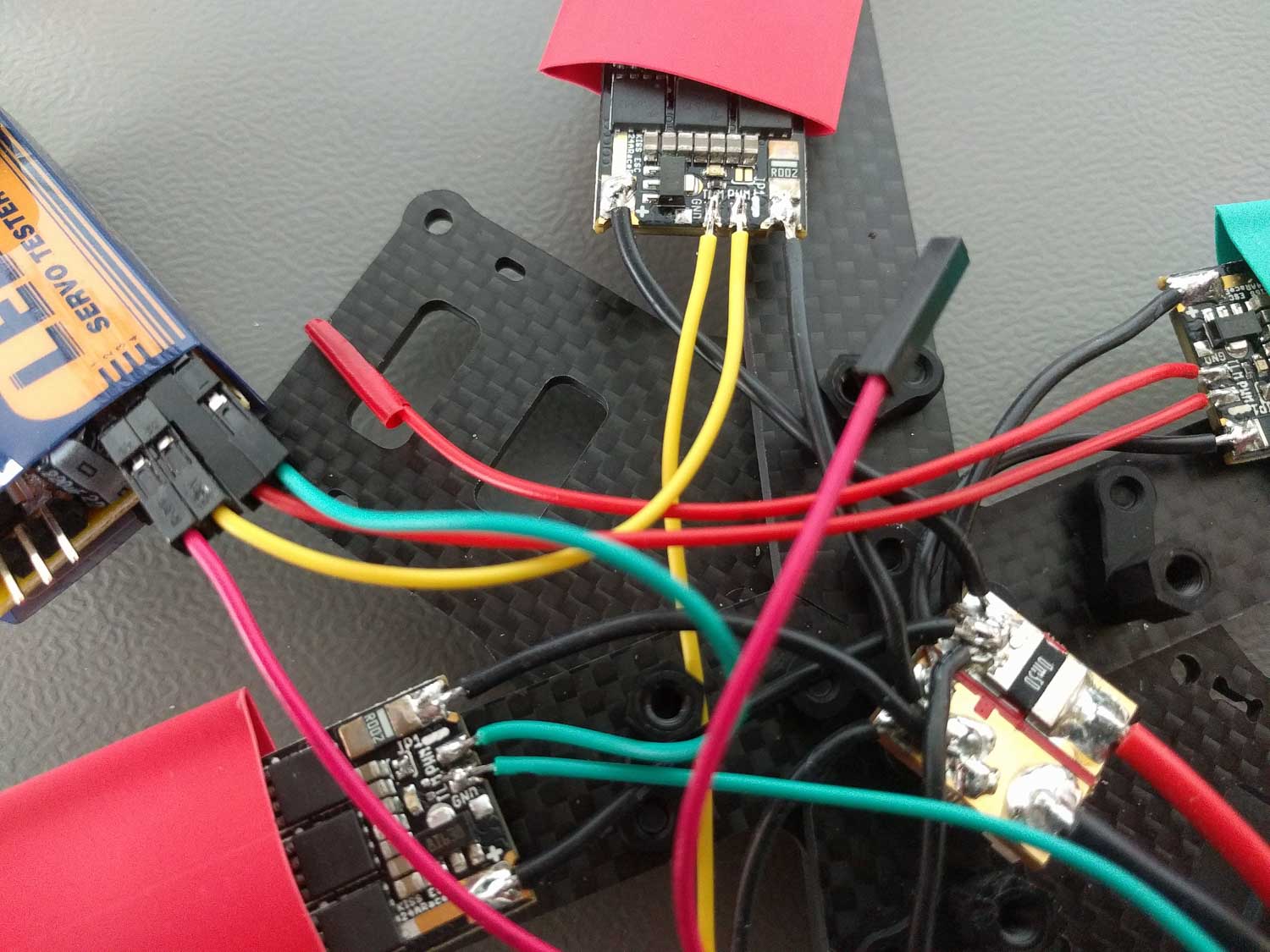
在继续工作之前,我使用廉价的 PWM 伺服测试仪测试了所有电调电机对及其旋转方向。
# 连接和amp;安装电子设备
TIP
仔细检查连接的每个组件的引脚分配。遗憾的是,并非所有的硬件组件都是即插即用的,即使乍看起来是这样。
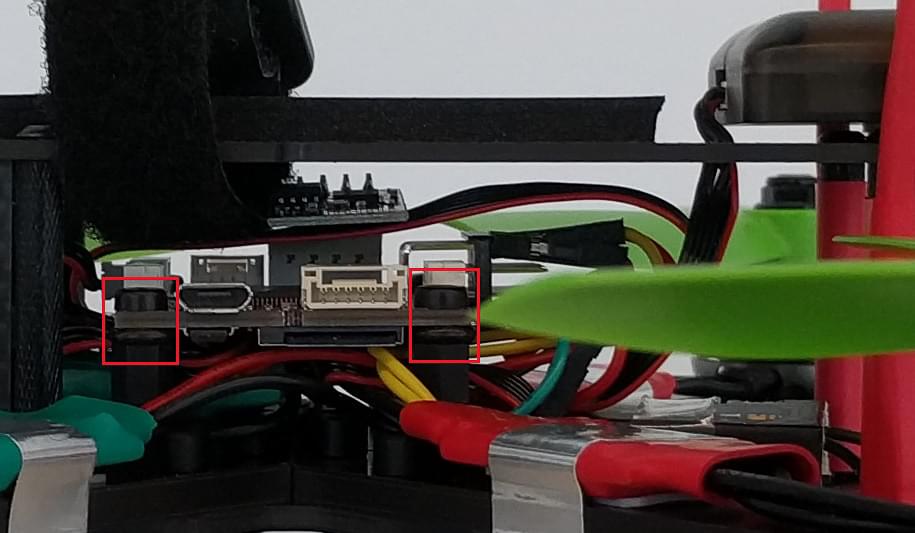
您需要 Pixracer 硬件文档 这一步需要找到所有需要的连接器。我试图将所有电缆都铺设在 Pixracer 电路板下面,这样既干净利落,又能为将来安装 FPV 摄像头和发射器节省空间。
我使用 QAV-R 机架随附的尼龙垫片和螺钉安装了 Pixracer,但是 放一些小 O 形圈 在电路板和垫片之间增加一些减震装置。确保 不要过紧或过松螺丝这样做时,木板会明显地接触到两边,但不会被任何张力夹住。木板不应以任何方式悬挂,但如果用手指施力,木板可以轻微移动。
警告
这会严重影响陀螺仪和加速度传感器在飞行过程中测量到的振动噪音水平。

# 遥控接收器
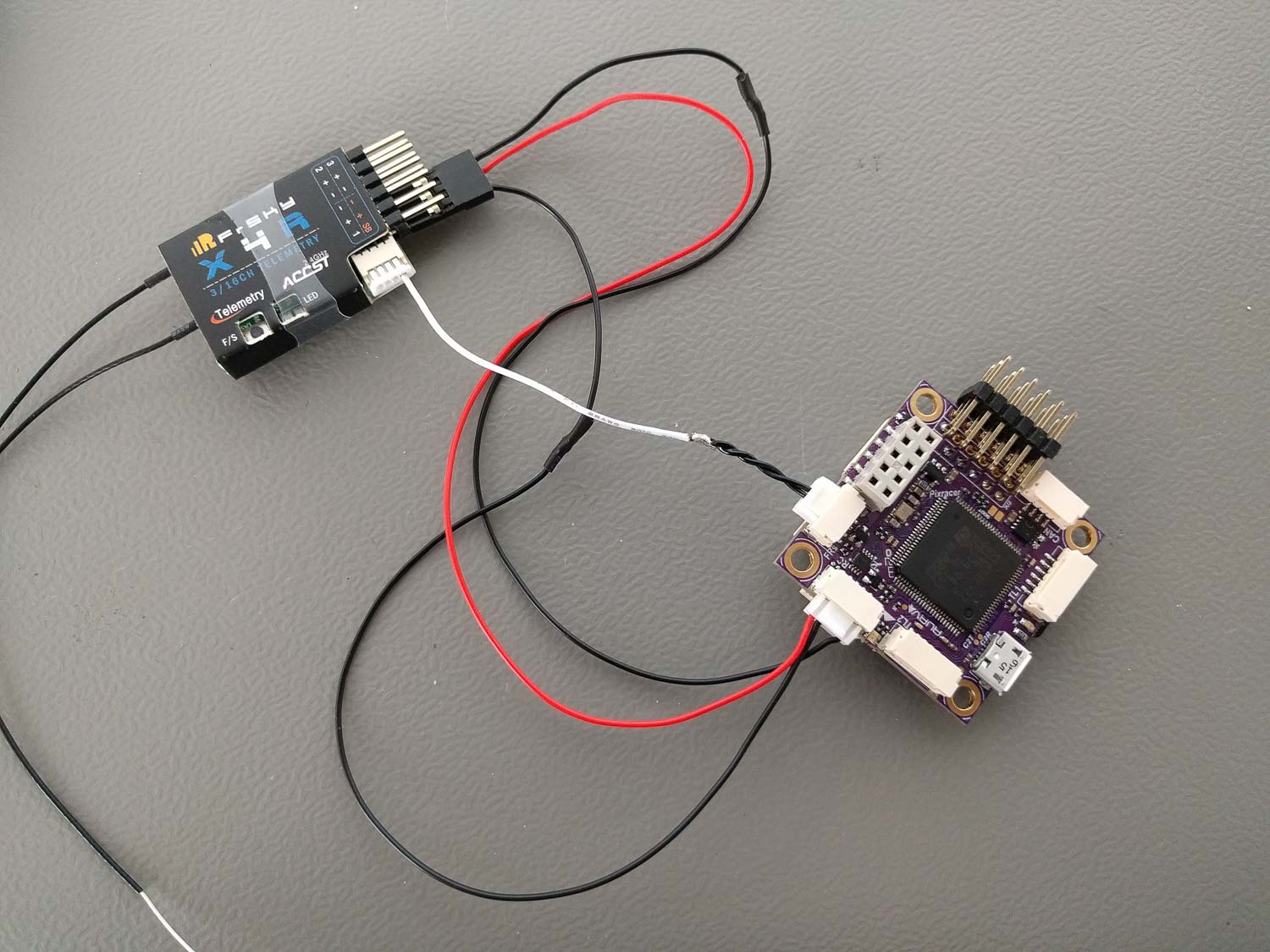
我使用 Pixracer 随附的电缆连接了 FrSky S-BUS 接收器,但剪掉了不必要的电缆分支。
对于智能遥测端口,我使用了接收器随附的电缆。我用镊子拔掉了连接器上所有不必要的针脚,并将白色松散端电缆换到连接器的正确针脚上,以连接智能信号。然后,我按照示意图将松散端焊接到与 FrSky 端口相匹配的电缆上:

我还省略了接地 (GND) 引脚,因为它与电源正极引脚一样,已通过 RCin S-BUS 电缆连接。
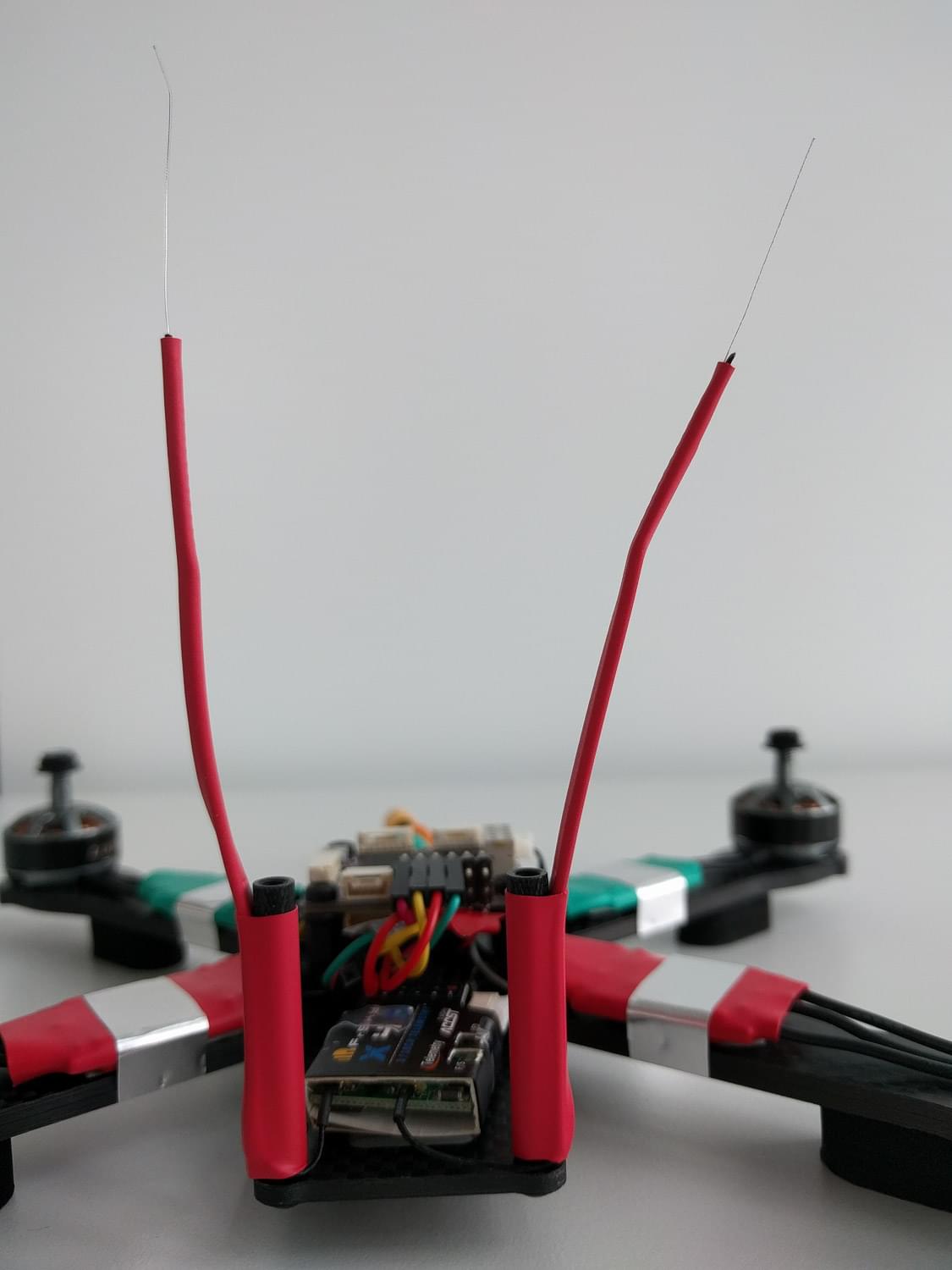
# 遥控天线支架
为了实现良好的遥控连接,同时又不冒险将天线安装在道具上,我采用了一种使用热缩管和拉链扎带的坚固安装方法。
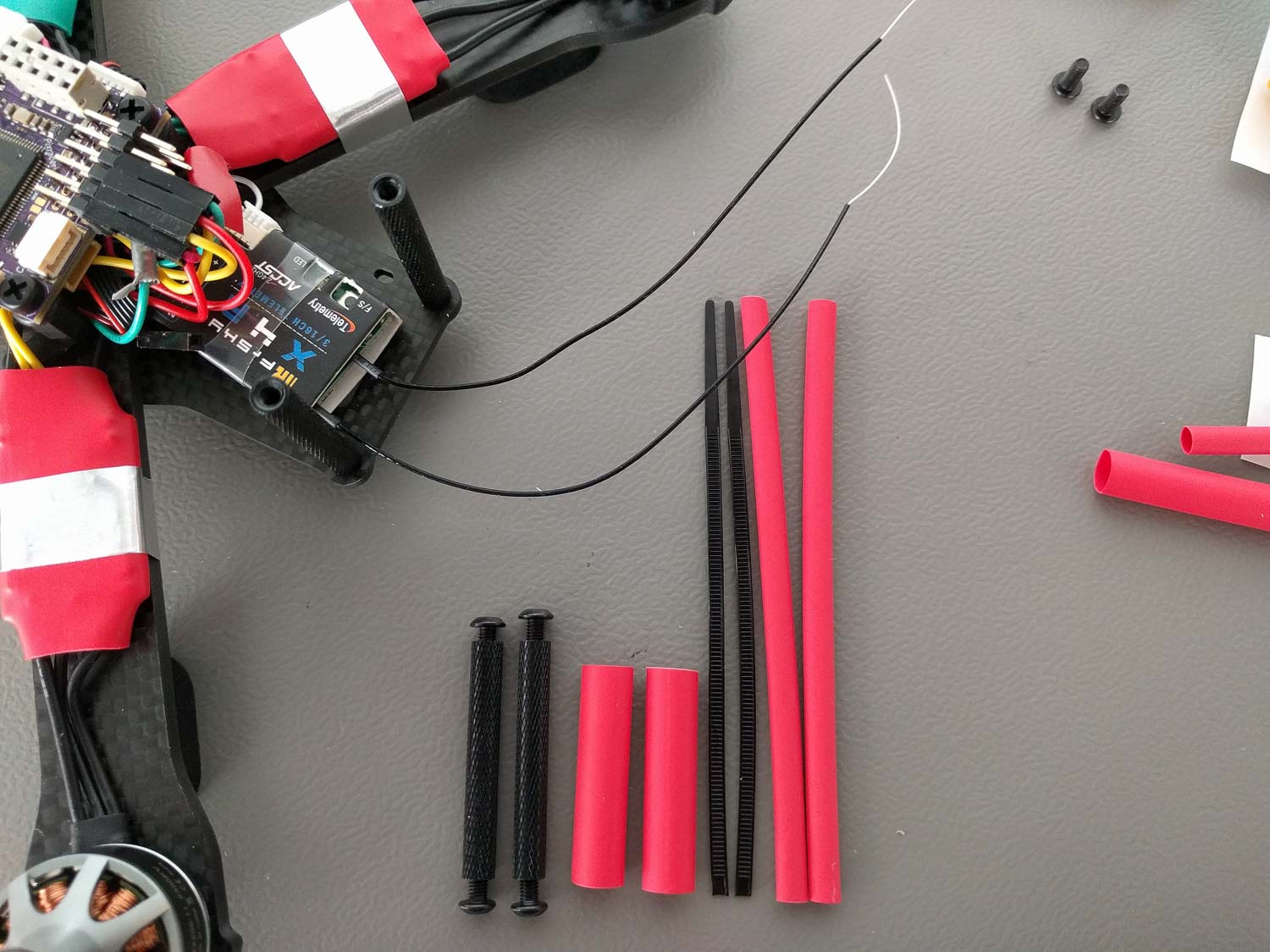
使用这种方法时,您需要剪掉拉链带孔的大端,将其余部分与天线电缆一起穿过一个长的热缩管,然后使用一个更大但更短的热缩管将其安装到框架垫片上。
# 电调信号
对于电调信号,我按照 Pixracer 硬件文档 和 四旋翼 x 配置 电机编号方案。由于我们没有接地或 BEC 正向电压连接,因此我们将我们的 PWM 电调信号线分别连接到相应输出连接器的最顶端针脚上。
# 全球定位系统/外置磁力计
我使用了 Pixracer 套件附带的 GPS 电缆,该电缆与使用过的 GPS 的连接器相匹配。遗憾的是,针脚的分配完全错误,我又用镊子按照 Pixracer 套件的说明重新连接了连接器。 3DR Pixhawk Mini 用户手册 GPS 端口。
# Pixracer GPS/I2C 端口
| 针脚 | 任务 |
|---|---|
| 1 | 接地 |
| 2 | SDA |
| 3 | SCL |
| 4 | RX |
| 5 | 德克萨斯州 |
| 6 | +5V |
# M8N 3DR Pixhawk 迷你 GPS 连接器
| 针脚 | 任务 | 连接至 Pixracer 引脚 |
|---|---|---|
| 1 (红色) | SCL | 3 |
| 2 | SDA | 2 |
| 3 | VCC 5V | 6 |
| 4 | RX | 5 |
| 5 | 德克萨斯州 | 4 |
| 6 | 接地 | 1 |
我使用列出的通用多旋翼飞机 GPS 桅杆安装 GPS 模块,因为如果将其安装得更靠近机身,磁力计读数就完全无法使用。将模块直接安装在机架顶部最后部的实验显示,磁力计的噪声幅度为 6 倍,这很可能是由电调电流的磁场造成的。请注意,我将桅杆缩短了约 2 厘米,使其更适合电缆长度和机架尺寸。GPS 模块用双面胶粘在桅杆顶板上。
# FPV 设置
这是用于可选 5.8GHz FPV 实时视频传输的说明。您需要使用开头列出的其他 FPV 部件。这里描述的 FPV 传输在电子上独立于飞行控制器,它只需要电源模块后的电池电压。
我首先进行了台架测试,以确保一切工作正常。为此,要连接发射机附带的视频信号线,将其插入 FPV 摄像机的背面和发射机的匹配插头。然后将 JST 电源插头连接到飞行器或其他电压源上。发射器 LED 灯应亮起。使用调整参数到正确频道的 5.8GHz 接收设备检查视频。若要将发射器配置到其他频道并调整发射功率,请参阅 "如何配置发射器"。 Tramp HV 用户手册 (打开新窗口).
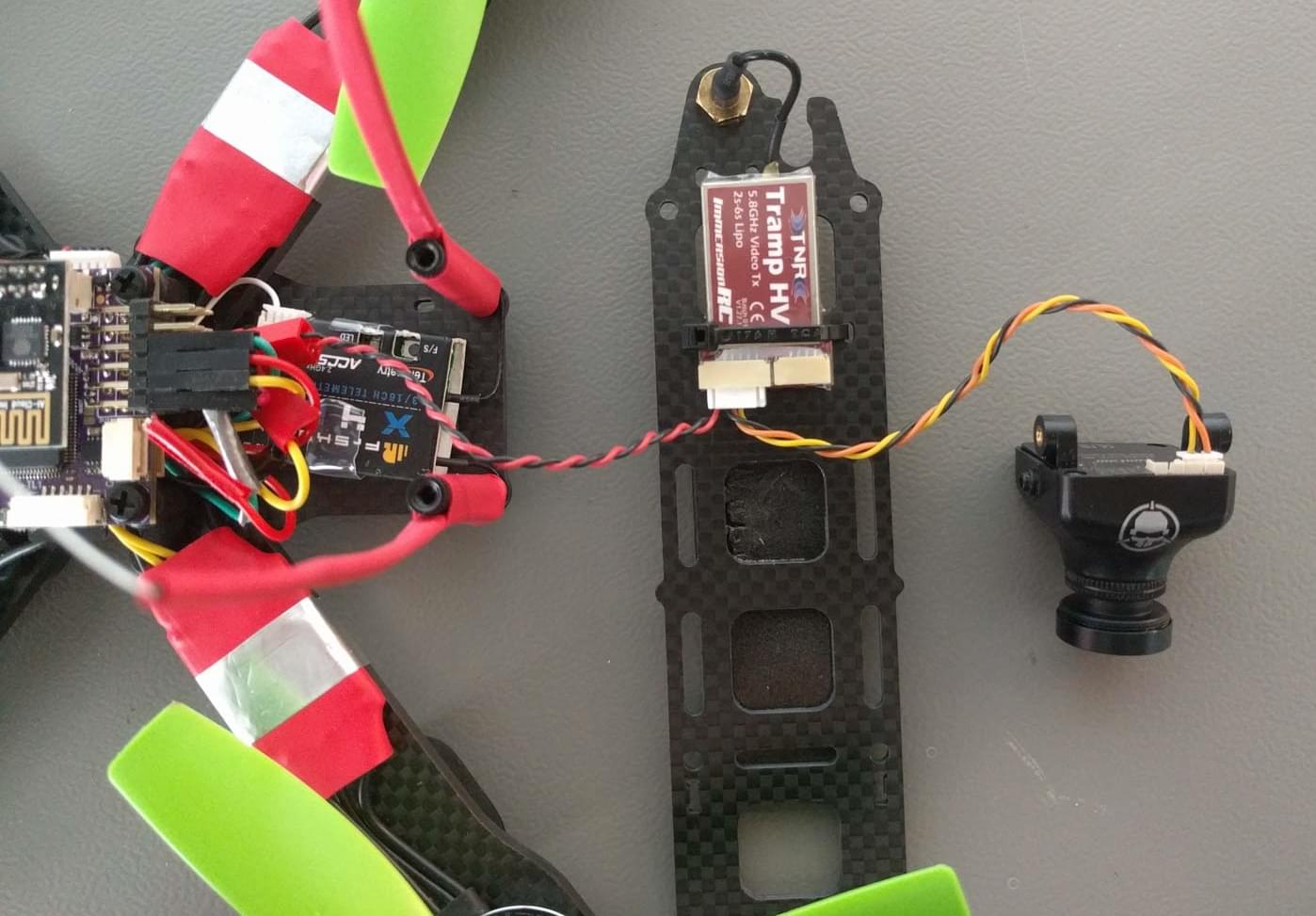
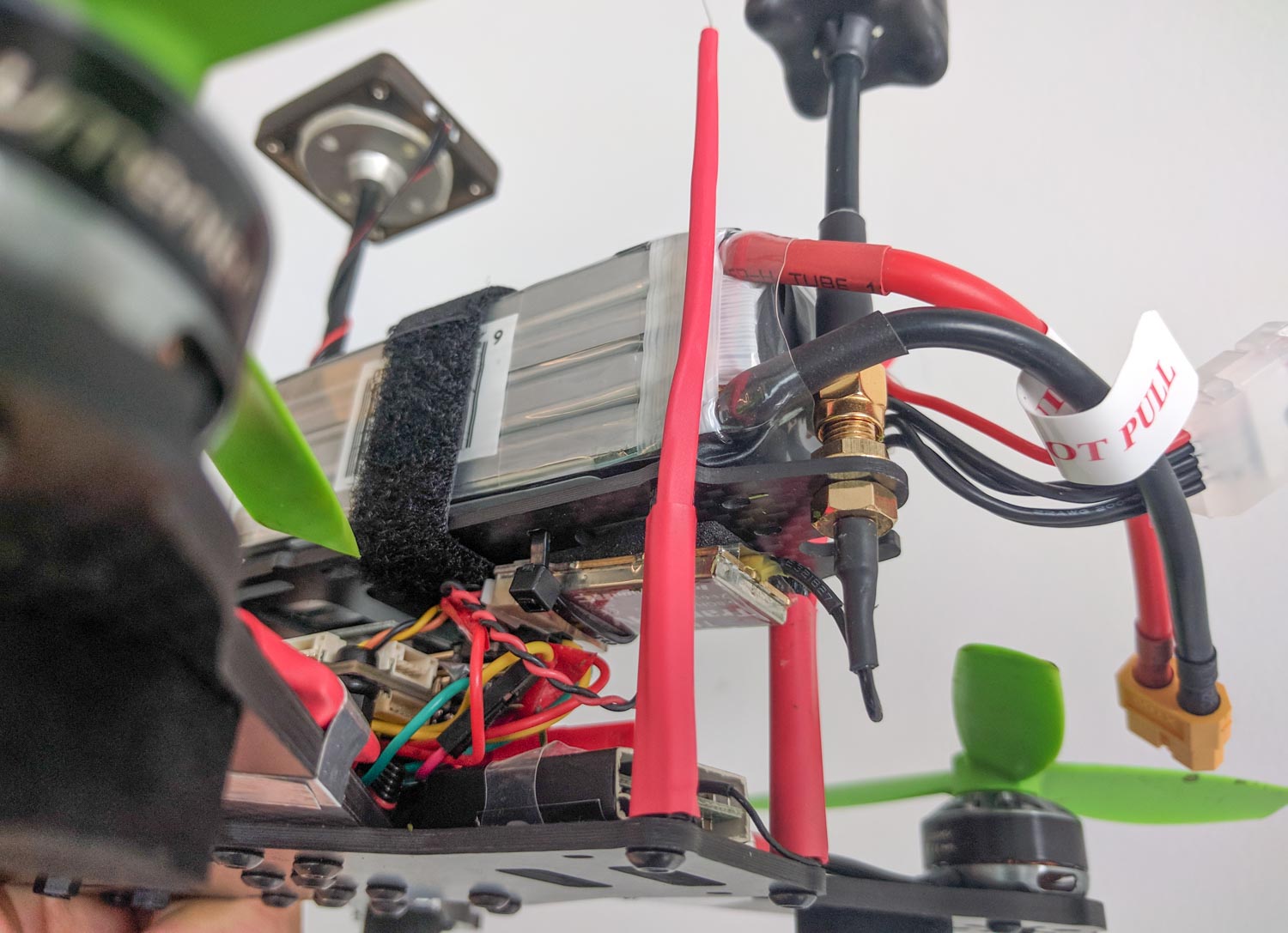
正如您所看到的,我用扎带将发射机从内部安装到了机架的顶部。像这样安装电子设备时,一定要在中间放一块自粘的泡沫塑料,以免在飞行过程中造成物理损坏。确保发射机的天线接头与机架的专用孔相吻合。
部件清单中的这套华丽 FPV 摄像机不仅配备了我迄今为止见过的最好的 FPV 镜头,还包括多个摄像机支架,其中一个非常灵活,可用于调整摄像机角度,并能很好地安装到 QAV-R 的框架中。我是按照下一张图片中的样子安装的。用于将相机支架锁在框架上的两颗螺丝和螺母是从框架套件中剩余的备用螺丝和螺母中提取的。

# PX4 配置
QGroundControl 用于安装 PX4 自动驾驶仪并为机架进行配置/调整。 下载并安装 (打开新窗口) QGroundControl 您的平台。
TIP
有关安装和配置 PX4 的完整说明,请参见 基本配置.
警告
在进行任何初始配置时,请务必将电池或螺旋桨从载具上卸下。安全第一!
首先更新固件、机身和致动器映射:
-
您需要选择 通用 250 竞赛 机身Quadrotor x > 通用 250 Racer).
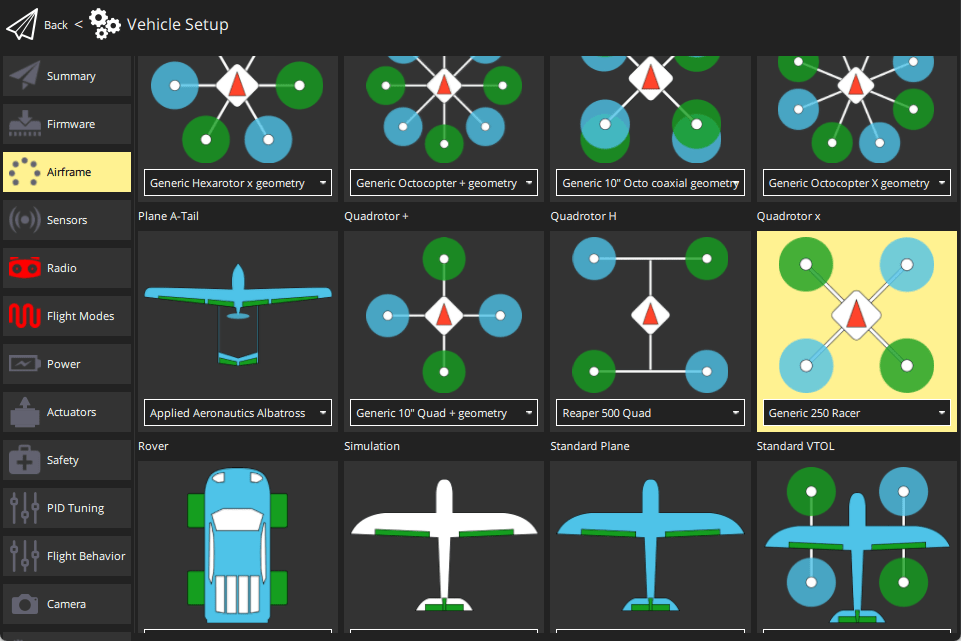
-
- 您应该不需要更新载具的几何形状。
- 为输出端分配执行器功能,以匹配您的布线。
- 使用滑块测试配置。
然后执行必要的设置/校准:
理想情况下,你也应该这样做:
# 调音
机身选择套件 默认 机架的自动驾驶参数。这些参数足以满足飞行需要,但最好还是针对特定的机架结构调整参数。
有关如何操作的说明,请从 自动调整飞行稳定参数.