# PX4 Vision 自主开发套件
PX4 Vision 自主开发套件 (打开新窗口) 是一款功能强大、价格低廉的工具包,可用于自动驾驶汽车的计算机视觉开发。
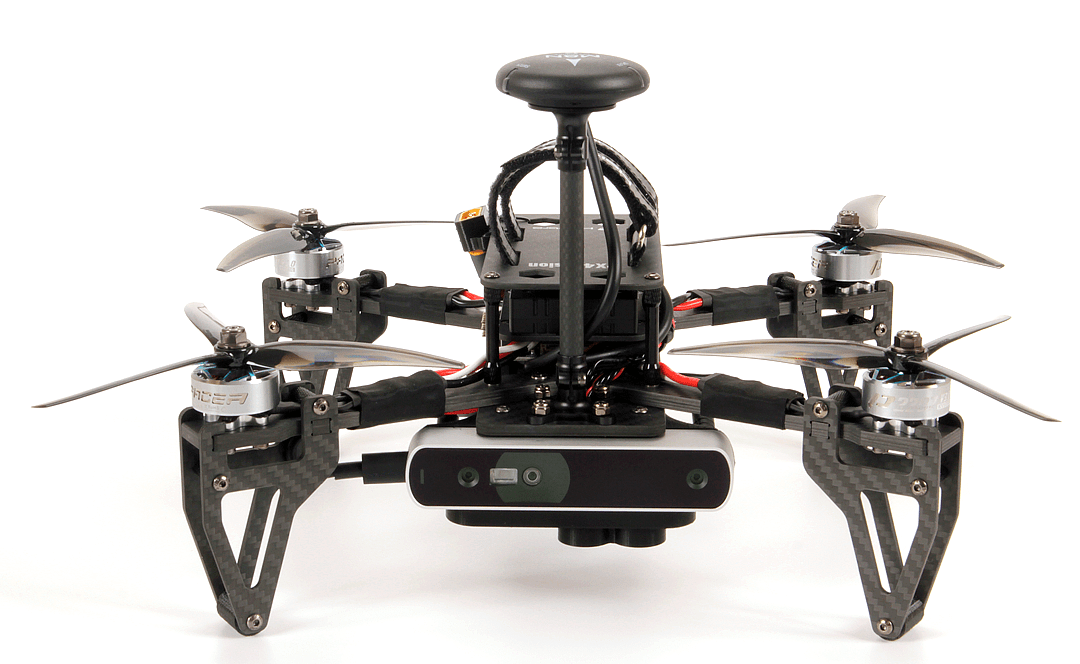
该套件包含一架几乎可以随时飞行的碳纤维四旋翼飞行器,配备了一个 Pixhawk 4 或 Pixhawk 6C (V1.5)飞行控制器、一个 UP 核心 配套电脑(4GB 内存 & 64GB eMMC),以及 Occipital 结构核心 深度摄像头传感器。
备注
这辆车没有预装软件。套件中包含一个 U 盘,其中有一个 避障 功能的实现,基于 PX4 规避 (打开新窗口) 项目。本示例仅供参考,旨在展示平台的功能。该软件与 PX4 的最新版本不兼容,也未得到积极维护或支持。
指南介绍了飞行器准备飞行所需的最低限度的额外设置(安装遥控系统和电池)。指南还介绍了首次飞行以及如何开始修改计算机视觉代码。
# 购买地点
# Px4 Vision 指南内容
# 警告和通知
该套件用于使用前向摄像头的计算机视觉项目(没有向下或向后的深度摄像头)。因此,它不能用于(未经修改)测试 安全着陆或其他需要朝下摄像头的功能。
任务中的避障只能在有 GPS 时进行测试(任务使用 GPS 坐标)。在定位模式下,如果 GPS 或光流能够很好地锁定位置,则可以测试防碰撞功能。
标有
USB1如果与 USB3 外设(禁用依赖 GPS 的功能,包括任务)。这就是为什么启动映像是在一个 USB2.0 记忆棒。使用 ECN 010 或以上版本(载板 RC05 及以上)的 PX4 Vision v1 UP 核心 可使用直流插头或电池供电。

所有 PX4 Vision v1.5 UP 核心 可使用直流插头或电池供电。
警告
对于 ECN 低于 010/ 载波板低于 RC04 的 PX4 Vision v1,可使用 UP 核心 只能使用电池供电(请勿取下电池)。 UP 核心电力 插座安全盖)。这不适用于 PX4 Vision v1.5 版

# 内部内容
备注
PX4 Vision V1 和 V1.5 之间的区别在于 这里 (打开新窗口)

PX4 Vision V1 的内部信息可在此处的 点击此处查看 PX4 v1.13 文档 (打开新窗口).
PX4 Vision DevKit 包含以下组件:
核心组成部分:
- 1x Pixhawk 4 或 Pixhawk 6C(用于 v1.5)飞行控制器
- 1x PMW3901 光流量传感器
- 1x TOF 红外线距离传感器 (PSK-CM8JL65-CC5)
- 1x 结构核心深度摄像头
- 160 度广角摄像头
- 立体红外摄像机
- 机载 IMU
- 功能强大的 NU3000 多核深度处理器
- 1x UP 核心 计算机(4GB 内存&;64GB eMMC,带 Ubuntu 和 PX4 避雷器)
- 英特尔® Atom™ x5-z8350(主频高达 1.92 GHz)
- 兼容操作系统:Microsoft Windows 10 完整版、Linux(ubilinux、Ubuntu、Yocto)、Android
- 连接至飞行控制器的 FTDI UART
USB1:USB3.0 用于从 USB2.0 记忆棒启动 PX4 避障环境的端口(连接 USB3.0 外围设备可能会干扰 GPS)。USB2:JST-GH 连接器上的 USB2.0 端口。可用于第二摄像头、LTE 等(或开发过程中的键盘/鼠标)。USB3:连接深度摄像头的 USB2.0 JST-GH 端口HDMI:HDMI 输出- SD 卡插槽
- WiFi 802.11 b/g/n @ 2.4 GHz(连接到外部天线 #1)。允许计算机访问家庭 WiFi 网络,进行互联网访问/更新。
机械规格:
- 框架全 5 毫米 3K 碳纤维斜纹布
- 电机T-MOTOR KV1750
- 电调BEHEli-S 20A ESC
- GPS: M8N GPS 模块
- 电源模块:Holybro PM07
- 轴距:286 毫米
- 重量:854 克(不含电池和道具
- 遥测:连接至飞行控制器的 ESP8266(连接至 2 号外部天线)。实现与地面站的无线连接。
一个 USB2.0 记忆棒,内含预刷新软件:
- Ubuntu 18.04 LTS
- ROS 旋律
- 枕骨结构 核心 ROS 驱动器
- 马弗罗斯
- PX4 规避 (打开新窗口)
各种电缆、8 个螺旋桨、2 个电池带(已安装)和其他配件(可用于连接其他外围设备)。
# 您还需要什么
除电池和无线电控制系统必须单独购买外,该套件包含所有必要的无人机硬件:
- 电池
- 4S 锂电池,带 XT60 母接头
- 长度小于 115 毫米(安装在电源连接器和 GPS 杆之间)
- 无线电控制系统
- 任何 与 PX4 兼容的遥控系统 可以使用。
- 一个 FrSky Taranis 带有 R-XSR 接收器的发射机是比较流行的设置之一。
- 一把 H2.0 六角扳手(用于拧下顶板,以便连接遥控接收器)
此外,用户还需要地面站硬件/软件:
- 运行的笔记本电脑或平板电脑 QGroundControl (打开新窗口) (QGC)。
# 首次设置
附上 兼容遥控接收器 在载具上安装一个""(不随套件提供):
- 使用 H2.0 六角扳手工具卸下/拧下顶板(电池所在位置)。
- 将接收器连接至飞行控制器.
- 重新装上顶板。
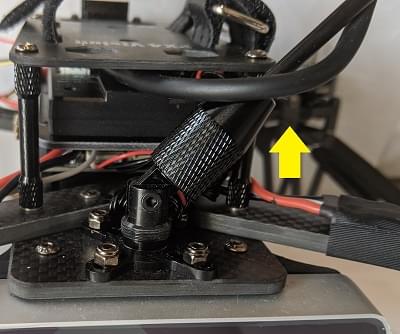
- 将遥控接收器安装在 UP 核心 载具后部的承载板(使用拉链或双面胶带)。
- 确保天线远离任何障碍物,并与车架电气隔离(例如,将天线固定在承载板下或载具臂或腿上)。
装订 将遥控地面和空中单元绑定在一起(如果尚未绑定)。绑定程序取决于所使用的特定无线电系统(请阅读接收机手册)。
将 GPS 杆升至垂直位置,然后将盖子拧到底板上的支架上。(V1.5 版不需要)
将套件中预置的 USB2.0 记忆棒插入 UP 核心 有标签的端口
USB1(下面突出显示)。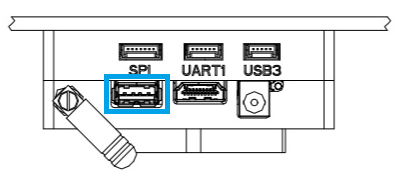
用充满电的电池为载具供电。
备注
确保在连接电池之前取下螺旋桨。
使用以下默认凭据将地面站连接到车载 WiFi 网络(几秒钟后):
- SSID: pixhawk4
- 密码 pixhawk4
TIP
WiFi 网络 SSID、密码和其他凭证可在连接后(如果需要)通过使用网络浏览器打开 URL 进行更改:
http://192.168.4.1.波特率不得更改为 921600。开始 QGroundControl 地面站。
配置/校准 载具:
备注
载具到货时应该已经过校准(例如,固件、机身、电池和传感器都已设置好)。不过,您需要校准无线电系统(您刚刚连接的系统),而且通常值得重新进行指南针校准。
(可选) 配置一个 飞行模式选择开关 遥控器上的
备注
还可以使用 QGroundControl
我们建议将遥控控制器开关定义为:
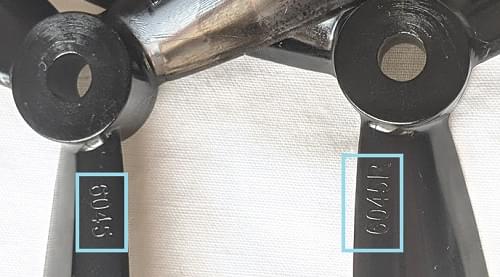
按图示旋转安装螺旋桨:

螺旋桨的方向可以通过标签确定: 6045 (正常,逆时针)和 6045R (逆时针)。
用提供的螺旋桨螺母拧紧:

# 驾驶无人机时注意避让
完成上述载具设置后:
连接电池,为载具供电。
等待启动顺序完成,避让系统启动(载具在启动过程中将拒绝上膛命令)。
TIP
从提供的 USB 记忆棒启动/启动过程大约需要 1 分钟(或从 USB 记忆棒启动/启动过程大约需要 30 秒)。 内存).
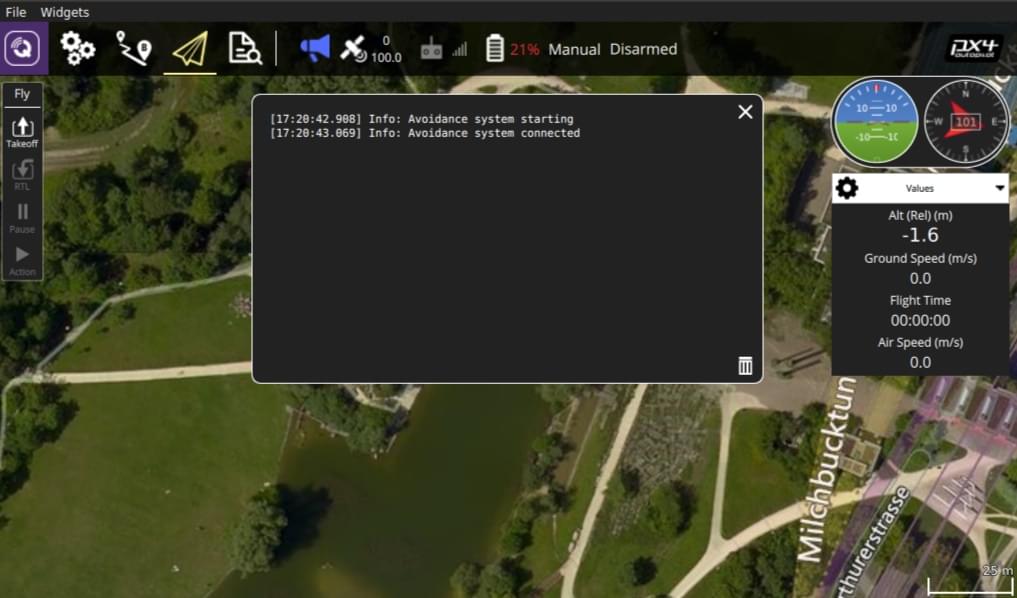
检查避让系统是否正常启动:
QGroundControl 通知日志会显示信息: 已连接避让系统.
红色激光显示在机身前部。 结构核心 照相机。
等待 GPS LED 灯变绿。这意味着飞行器已获得 GPS 定位,可以开始飞行!
将地面站连接到车载 WiFi 网络。
寻找一个安全的室外飞行地点,最好有一棵树或其他方便测试 PX4 Vision 的障碍物。
测试 预防碰撞启用 位置模式 并手动飞向障碍物。飞行器应减速,然后停在距离障碍物 6 米以内的地方(距离可以是 变了 使用 CP_DIST 参数)。
# 使用套件进行开发
下文将介绍如何将套件用作开发计算机视觉软件的环境。
# PX4 规避概述
PX4 规避 该系统包括运行在配套计算机(附带深度摄像头)上的计算机视觉软件,该软件可向运行在计算机上的 PX4 飞行算法池提供障碍物和/或路线信息。 飞行控制器.
有关配套计算机视觉/规划软件的文档可在 github 上找到: PX4/PX4-Avoidance (打开新窗口).该项目提供了许多不同的规划器实现(打包为 ROS 节点):
- PX4 Vision 套件可运行 地方规划师 默认情况下,这是您自己的软件的推荐起点。
- 全球规划师 尚未使用该套件进行测试。
- 着陆规划器 需要一个朝下的摄像头,如果不先修改摄像头的安装,就无法使用。
PX4 和配套电脑通过以下方式交换数据 MAVLink (打开新窗口) 使用这些接口:
# 在配套计算机上安装图像
您可以在 UP 核心 并从内置内存启动(而不是 U 盘)。
建议这样做,因为从内置内存启动速度更快,还能腾出一个 USB 端口,而且提供的内存可能比 U 盘更大。
备注
从内置存储器启动大约需要 30 秒钟,而从附带的 USB2 记忆棒启动大约需要一分钟(其他记忆卡可能要多花几倍的时间)。
要将 USB 映像闪存到 UP 核心:
将预先刷新的 USB 驱动器插入 UP 核心 有标签的端口
USB1.登录配套计算机 (如上所述)。
打开终端并运行以下命令将映像复制到内部存储器(eMMC)上。在闪存过程中,终端会提示一些响应。
CD ~/catkin_ws/src/px4vision_ros/tools 苏都 ./flash_emmc.sh备注
保存在 UP 核心 执行此脚本时,计算机将被移除。
拔出 U 盘。
重新启动载具。重新启动载具 UP 核心 现在,计算机将从内部存储器(eMMC)启动。
# 启动配套计算机
首先将提供的 USB2.0 记忆棒插入 UP 核心 有标签的端口 USB1然后使用 4S 电池为载具供电。避障系统应在大约 1 分钟内启动(但这取决于所提供的 USB 记忆棒)。
TIP
驾驶无人机时注意避让 此外,还解释了如何验证避让系统是否处于激活状态。
如果您已经 在配套电脑上安装图像 您只需为载具供电即可(即无需 USB 记忆棒)。避让系统应在 30 秒内启动并运行。
启动后,配套计算机既可用作计算机视觉开发环境,也可用于运行软件。
# 登录伴侣电脑
登录配套电脑:
将键盘和鼠标连接到 UP 核心 通过端口
USB2:
使用套件中的 USB-JST 电缆获取 USB A 接口

如果键盘和鼠标有单独的连接器,则可在电缆上安装 USB 集线器。
将显示器连接到 UP 核心 HDMI 端口。

然后,Ubuntu 登录屏幕就会出现在显示器上。
登录 UP 核心 使用证书:
- 用户名 px4vision
- 密码 px4vision
# 开发/扩展 PX4 规避功能
PX4 Vision 的 UP 核心 计算机为扩展 PX4 Avoidance 软件(更广泛地说,是使用 ROS 2 开发新的计算机视觉算法)提供了一个完整且配置齐全的环境。您应在载具上开发和测试软件,将其同步到自己的 git 仓库,并在 github 上与更广泛的 PX4 社区分享任何修正和改进。 PX4/PX4-Avoidance (打开新窗口) repo.
柔荑花序工作区位于 ~/catkin_ws并为运行 PX4 避障本地规划器进行了预配置。启动文件 (避免发射)在 px4vision_ros 包(修改该文件可更改启动的规划器)。
启动时会启动避让软件包。若要集成不同的规划器,则需要禁用此功能。
使用以下命令禁用回避程序:
systemctl stop avoidance.service您只需重启机器即可重新启动服务。
其他有用的命令包括
# 重新启动服务 systemctl start avoidance.service # 禁用服务(停止服务,启动后不重启) systemctl disable avoidance.service # 启用服务(启动服务并启用启动后重启) systemctl 以便 避免.服务避障软件包的源代码可在 https://github.com/PX4/PX4-Avoidance 中找到,它位于
~/catkin_ws/src/avoidance.修改代码要获取最新的避险代码,请从避险软件仓库中提取代码:
Git 拉力原点 Git 检查 origin/master构建软件包
catkin build local_planner
ROS 工作区位于 ~/catkin_ws.有关在 ROS 中开发和使用 catkin 工作区的参考信息,请参见 ROS 柔荑教程 (打开新窗口).
# 开发 PX4 固件
该套件设计用于创建计算机视觉软件,该软件可在配套计算机上运行,并与 PX4 灵活的路径规划和防碰撞接口集成。
您还可以修改 PX4 本身,以及 将其安装为自定义固件:
- 您需要连接 QGroundControl 到套件的 Pixhawk 通过 USB 以更新固件。
- 选择 PX4 Vision DevKit 加载新固件后的机身:

备注
不修改 PX4 代码 用得上 可满足大多数计算机视觉使用案例。要讨论接口或如何集成其他功能,请加入 PX4 支持通道.
# PX4 Vision 载板引脚
有关 PX4 Vision 1.15 的信息,请访问 https://docs.holybro.com (打开新窗口).载波板引脚分配和其他信息载于 下载区 (打开新窗口).
# 其他发展资源
- UP 核心 维基 (打开新窗口) - 向上核心 配套计算机技术信息
- Occipital 开发人员论坛 (打开新窗口) - 结构核心 摄像机信息
- Pixhawk 4 概览
- Pixhawk 6C 概览
- PX4 规避软件/文档 (打开新窗口)
- 路径规划界面
# 如何获得技术支持
有关硬件问题,请致电 Holybro: [email protected].
有关软件问题,请使用以下社区支持渠道: