# 多旋翼飞行器 PID 调整指南
本教程将介绍如何调整 PX4 上的 PID 循环,使其适用于以下所有情况 多旋翼飞行器设置 (四边形、六边形、八边形等)。
建议对所有新的飞行器设置进行调整,因为相对较小的硬件和装配变化都会影响最佳飞行所需的调整增益。例如,不同的电调或发动机需要不同的调整参数增益。
TIP
一般来说,如果您使用适当的 支持的机身配置 (选自 QGroundControl > 机身),默认的调整应该可以让您安全地驾驶飞行器。要获得 极品 我们建议您调整新车的性能。
警告
调校不好的载具很可能不稳定,容易撞车。一定要为载具配备 熄火开关.
# 导言
PX4 的用途 P比例、Integral、 DPID)控制器(这是最普遍的控制技术)。
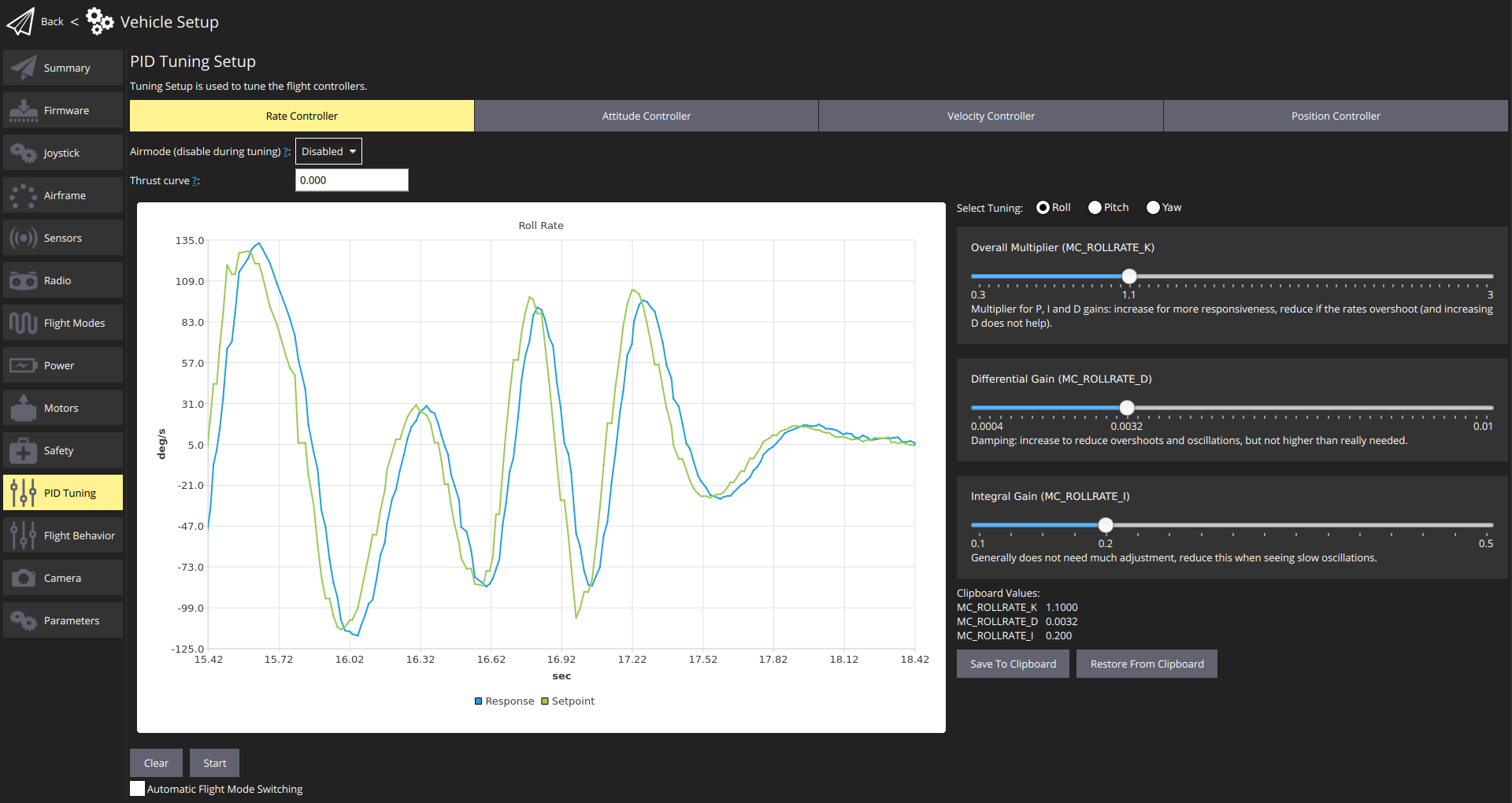
QGroundControl PID 调节 设置可提供载具设定点和响应曲线的实时图。调试的目的是设置 P/I/D 值,以使 回应 曲线与 设定点 尽可能接近曲线(即快速反应,没有过冲)。
控制器是分层的,这意味着较高层次的控制器将其结果传递给较低层次的控制器。最低级的控制器是 速率控制器随后是 姿态控制仪最后是 速度放大器;位置控制器.PID 调整也需要按照同样的顺序进行,从速率控制器开始,因为它将影响所有其他控制器。
每个控制器(速率、姿态、速度/姿态)和轴(偏航、滚转、俯仰)的测试步骤始终相同:通过快速移动摇杆创建一个快速的设定点变化,并观察其响应。然后调整滑块(如下文所述),以改善对设定点响应的跟踪。
TIP
- 速率控制器的调整最为重要,如果调整得当,其他控制器通常无需调整或只需微调
- 通常情况下,滚动和俯仰可以使用相同的调整参数增益。
- 使用 Acro/Stabilized/Altitude 模式调整速率控制器
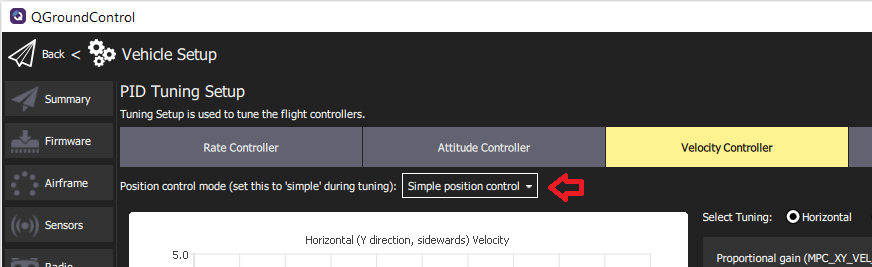
- 使用 位置模式 以调整 速度控制器 和 定位(POSITION)控制员.确保切换到 简单的位置控制 模式,以便生成步进输入。
# 先决条件
您正在使用 QGroundControl 日常建设 (打开新窗口) (最新的调整用户界面将出现在 2021 年 3 月之后的下一个版本中)。
您选择了最匹配的 默认机身配置 您的载具。这样,您就可以拥有一辆会飞的汽车了。
你应该 电调校准.
如果使用 PWM 输出: PWM_MAIN_MIN 设置正确。它需要设置得低一些,但要使 电机永不停歇 当载具处于上膛状态时。
- 拆除螺旋桨
- 启动载具并将油门降至最低
- 将载具向各个方向倾斜约 60 度
- 检查电机是否关闭
尽可能使用 WiFi 等高速遥测链路(典型的低速遥测无线电速度不够快,无法进行实时反馈和绘图)。这对速率控制器尤为重要。
禁用 MC_AIRMODE 在对载具进行调校之前,请先对 PID 进行调校(PID 调校屏幕中有一个相关选项)。
# 调整参数程序
调整程序是
上膛飞行器、起飞和悬停(通常在 位置模式).
开放 QGroundControl 载具设置 > PID 调节
选择 费率控制器 标签。
确认空气模式选择器设置为 失能
设置 推力曲线 值为0.3(PWM、功率型控制器)或 1(转速型电调)。
备注
对于 PWM、基于功率和(某些)UAVCAN 速度控制器而言,控制信号与推力之间可能不是线性关系。因此,当飞行器以较大推力运行时,悬停推力下的最佳调整可能并不理想。
推力曲线值可用于补偿这种非线性:
- 对于 PWM 控制器来说,0.3 是一个很好的默认值(可能会受益于 进一步调整).
- 对于基于转速的控制器,使用 1(无需进一步调整,因为这些控制器具有二次推力曲线)。
欲了解更多信息,请参阅 详细的 PID 调整指南.
设置 选择调整参数 单选按钮: 卷轴.
要调整速率控制器,请切换到 Acro 模式, 稳定模式 或 高度模式 (除非启用自动切换)。
选择 开始 按钮,以便开始跟踪设定点和响应曲线。
快速移动 滚棍 全量程,并观察曲线图上的阶跃响应。
TIP
停止跟踪,以便于检查地块。缩放/平移时会自动停止。使用 开始 按钮重启绘图,而 清晰 重置它们。
使用滑块修改三个 PID 值(对于滚动率调整,滑块会影响
MC_ROLLRATE_K,MC_ROLLRATE_I,MC_ROLLRATE_D),并再次观察阶跃响应。只要移动滑块,数值就会保存到载具中。备注
目标是 回应 曲线与 设定点 尽可能接近曲线(即快速反应,没有过冲)。
PID 值可调整如下:
- P(比例)或 K 增益:
- 提高响应速度
- 如果响应出现过冲和/或振荡,则应减小响应(增加 D 增益到一定程度也有帮助)。
- D(导数)增益:
- 可增加该值以抑制过冲和振荡
- 仅根据需要增加,因为这会放大噪音(并可能导致电机发热)
- I(积分)增益:
- 用于减少稳态误差
- 如果太低,响应可能永远达不到设定点(例如在风中)
- 如果过高,则可能出现缓慢振荡
- P(比例)或 K 增益:
对俯仰和偏航重复上述调整过程:
- 使用 选择调整参数 单选按钮选择要调整的轴
- 移动相应的摇杆(如俯仰摇杆表示俯仰,偏航摇杆表示偏航)。
- 对于螺距调整,开始时使用与滚动相同的数值。
TIP
使用 保存到剪贴板 和 从剪贴板重置 按钮可将滚动设置复制到初始俯仰设置中。
在所有轴上重复姿态控制器的调整过程。
对速度和位置控制器(所有轴)重复上述调整过程。
调整参数这些控制器时使用位置模式
选择 简单的位置控制 选项中的 位置控制模式 ... 选择器(可直接控制步进输入的生成)
全部完成!离开设置前,请记住重新启用 Airmode。