# 罗盘校准
指南针校准过程会配置所有连接的内部和外部 磁强计. QGroundControl 将引导您按照设定的方向定位载具,并围绕指定轴线旋转载具。
备注
如果使用外部磁力计/指南针(例如集成在 GPS 模块中的指南针),请确保将外部指南针正确安装在载具上,并将其连接到自动驾驶仪硬件上。连接 GPS+ 指南针的说明请参阅 基本装配 用于您的特定自动驾驶仪硬件。连接后 QGroundControl 将自动检测外部磁力计。
TIP
首次使用时需要校准指南针,如果飞行器暴露在非常强的磁场中,或在磁场特性异常的地区使用,则可能需要重新校准。指南针校准不良的迹象包括多旋翼飞行器在悬停时盘旋、打保龄球(盘旋半径增大/螺旋式下降,通常高度不变,导致飞行偏离),或在尝试直线飞行时偏离路径。
# 执行校准
校准步骤如下
选择远离大型金属物体或磁场的位置。
TIP
金属并不总是很明显!避免在办公桌顶部(通常含有金属条)或载具旁边进行校准。如果您站在钢筋分布不均匀的混凝土板上,校准甚至会受到影响。
开始 QGroundControl 并连接载具。
选择 齿轮 图标(载具设置),然后点击 传感器 在侧边栏中。
点击 指南针 传感器按钮。
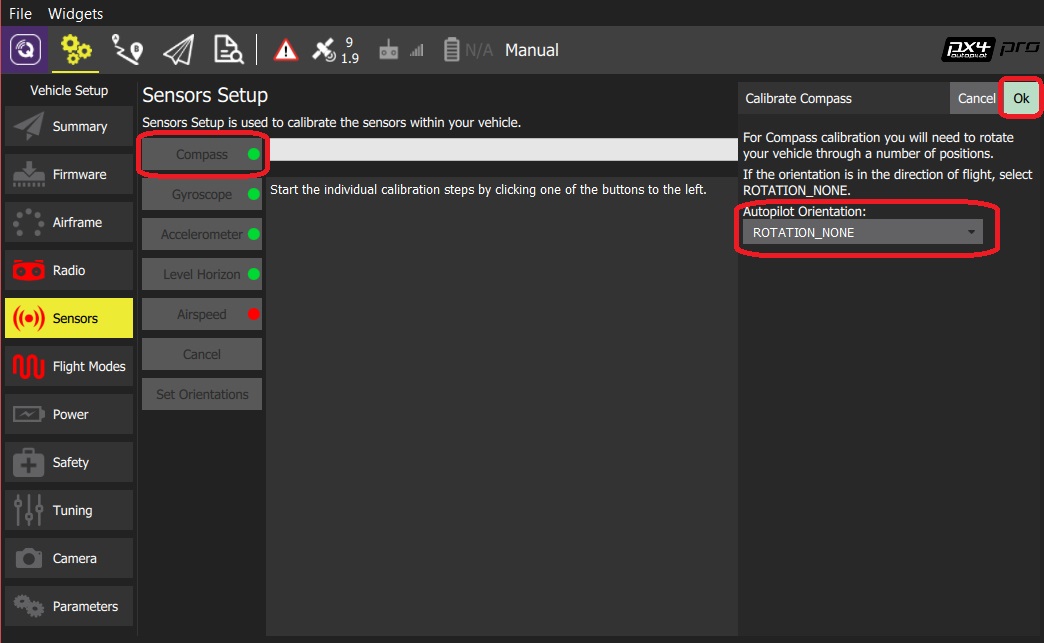
备注
您应该已经设置了 自动驾驶仪方向.如果没有,也可以在此处设置。
点击 好的 开始校准。
将飞行器放置在红色显示的任何一个方向(不完整)并保持不动。一旦出现提示(方位图像变为黄色),将载具绕指定轴线向任一/两个方向旋转。当前方向的标定完成后,屏幕上的相关图像将变为绿色。
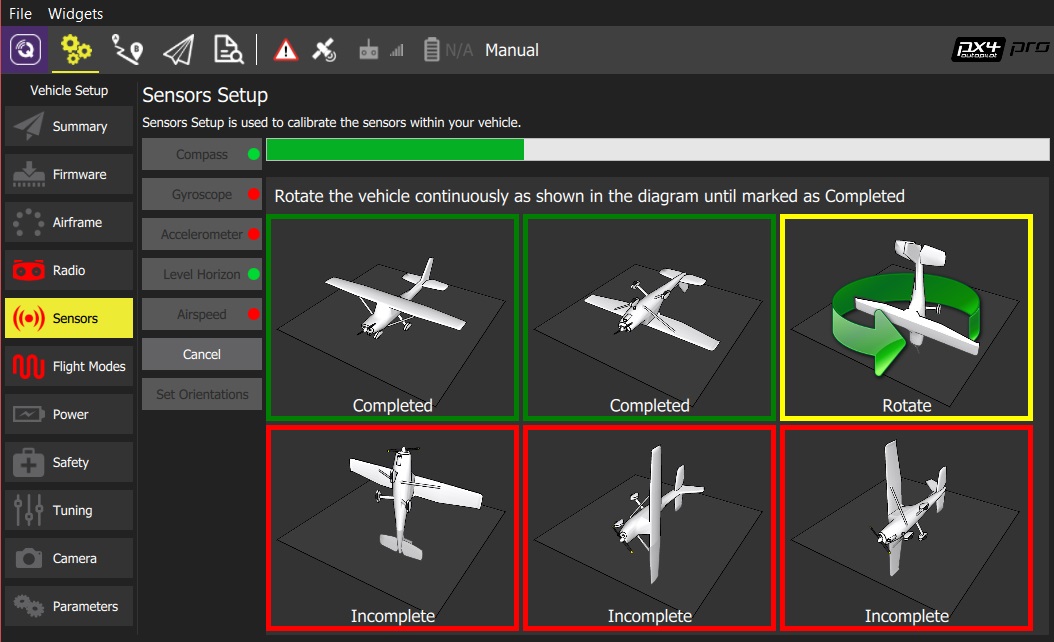
对所有载具方向重复校准过程。
校准载具的所有位置后 QGroundControl 将显示 校准完成 (所有方向图像将显示为绿色,进度条将完全填满)。然后您就可以进入下一个传感器。
# 更多信息
- QGroundControl 用户指南 > 传感器 (打开新窗口)
- PX4 安装视频 - @2m38s (打开新窗口) (Youtube)
- 罗盘功率补偿 (高级配置)