# 加载固件
QGroundControl 桌面 版本可用于将 PX4 固件安装到 Pixhawk 系列 飞行控制器板。
警告
开始安装固件之前 与载具的所有 USB 连接必须 断线 (直接或通过遥测无线电)。载具必须 没有 由电池供电。
# 安装稳定的 PX4
一般来说,您应该使用最新的 释放 版本的 PX4,以便从错误修复中受益,并获得最新、最强大的功能。
TIP
这是默认安装的版本。
安装 PX4:
- 首先选择 齿轮 图标 (载具设置) 顶部工具栏中的 固件 在侧边栏中。
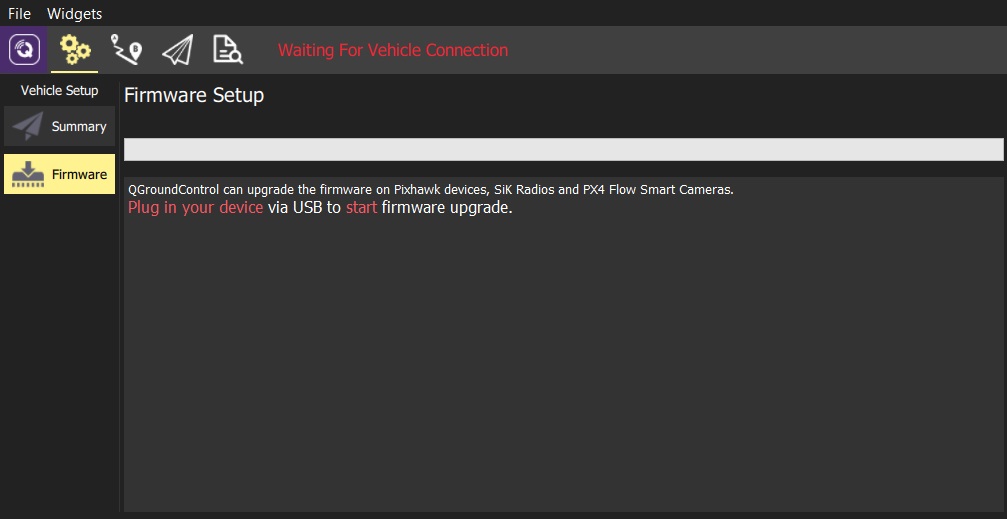
通过 USB 将飞行控制器直接连接到电脑。
备注
直接连接到机器上的供电 USB 端口(不要通过 USB 集线器连接)。
选择 PX4 Flight Stack X.x.x 发布 选项来安装 PX4 的最新稳定版本 硬件 (自动检测到)。
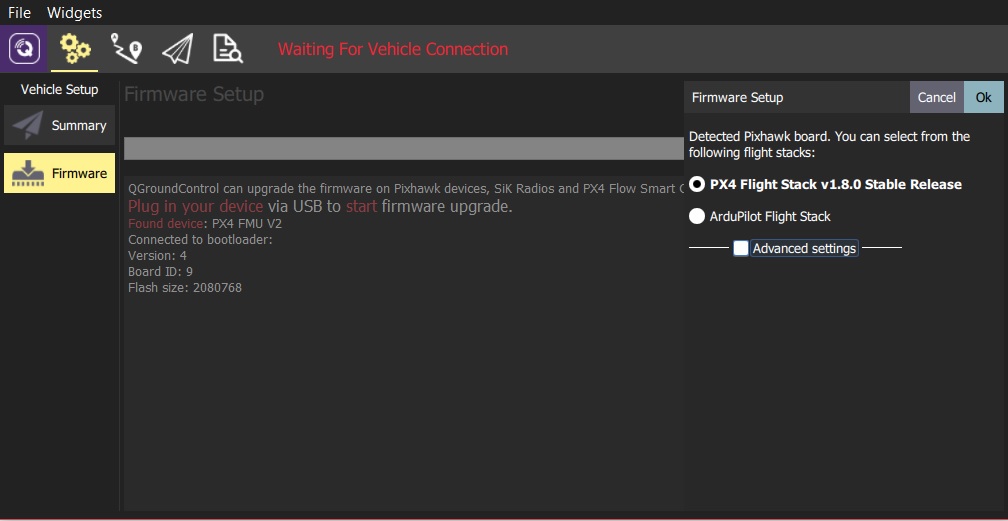
点击 好的 按钮开始更新。
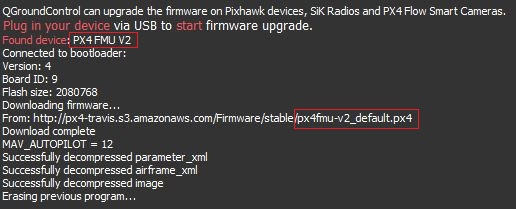
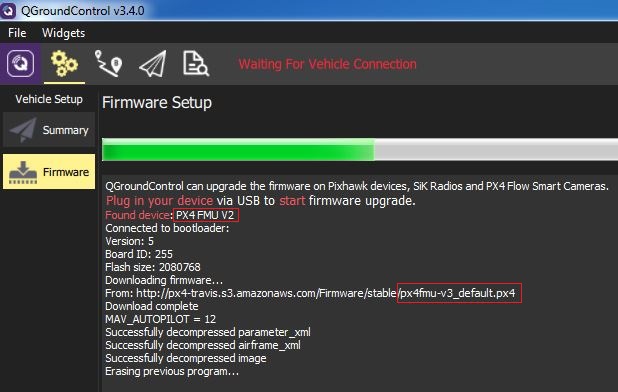
然后,固件将进行一系列升级步骤(下载新固件、清除旧固件等)。每个步骤都会打印到屏幕上,整体进度会显示在进度条上。
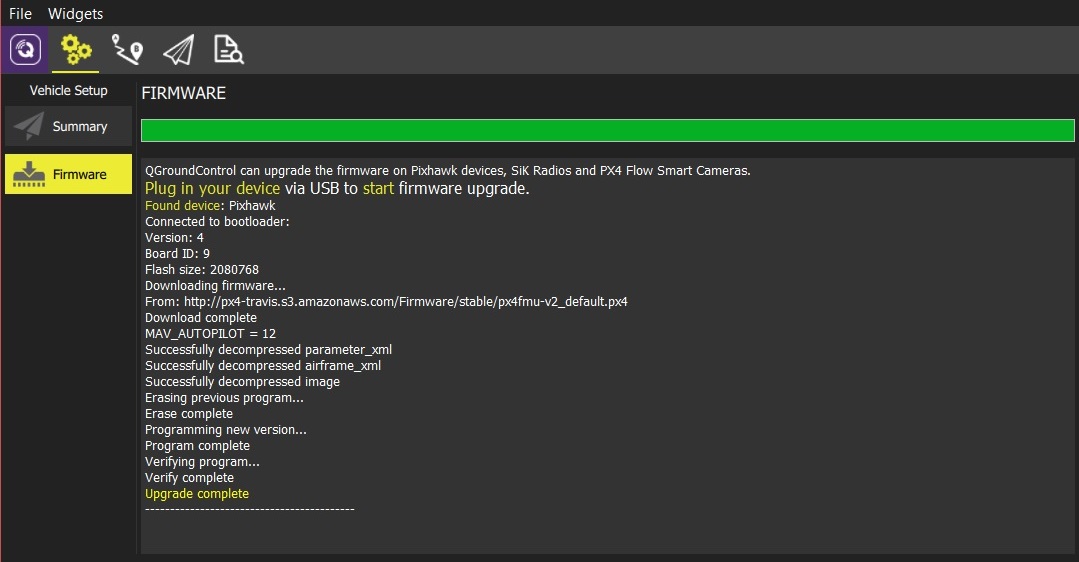
固件加载完成后,设备/载具将重新启动并重新连接。
TIP
如果 QGroundControl 安装了 FMUv2 目标机(请参阅安装过程中的控制台),并且您使用的是较新的电路板,您可能需要 更新引导程序 以访问飞行控制器上的所有内存。
接下来,您需要指定 车架 (然后是传感器、无线电等)。
# 安装 PX4 主固件、测试版固件或定制固件
安装不同版本的 PX4:
- 按上述步骤连接载具,然后选择 PX4 Flight Stack vX.x.x 稳定版
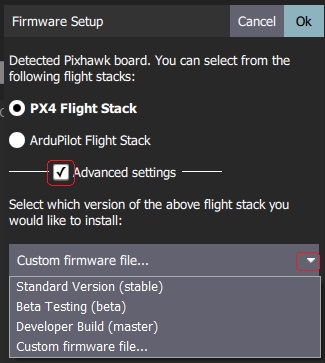
- 检查 高级设置 并从下拉列表中选择版本:
- 标准版本(稳定): 默认版本(即无需使用高级设置即可安装!)。
- Beta 测试(测试版): 测试版/候选版。仅在准备发布新版本时可用。
- 开发人员版本(主版本): PX4/PX4-Autopilot 的最新版本。
- 自定义固件文件.....: 自定义固件文件(例如您在本地创建的文件)。如果选择了该文件,则必须在下一步中从文件系统中选择自定义固件。
然后继续进行固件更新。
# FMUv2 引导加载程序更新
如果 QGroundControl 如果您安装了 FMUv2 目标机(请参阅安装过程中的控制台),并且使用的是较新的板,则可能需要更新引导加载程序,以便访问飞行控制器上的所有内存。
备注
早期 FMUv2 Pixhawk 系列 飞行控制人员有 硬件问题 该问题在更新的电路板上已经解决,但您可能需要更新出厂时提供的引导加载程序,以便安装 FMUv3 固件并访问全部 2MB 可用内存。这个问题在较新的电路板上得到了解决,但您可能需要更新出厂时提供的引导加载程序,以便安装 FMUv3 固件并访问全部 2MB 可用内存。
更新引导加载程序
插入 SD 卡(启用启动日志以调试任何问题)。
更新固件 至 PX4 师 版本(更新固件时,请检查 高级设置 然后选择 开发人员构建(主版本) 从下拉列表中选择)。 QGroundControl 将自动检测硬件是否支持 FMUv2,并安装相应的固件。
等待载具重新启动。
查找并启用 参数 SYS_BL_UPDATE.
重新启动(断开/重新连接电路板)。更新引导加载程序只需几秒钟。
那么 更新固件 又来了这一次 QGroundControl 将自动检测硬件为 FMUv3,并适当更新固件。
备注
如果硬件具有 硅勘误表 在这种情况下,您将无法安装 FMUv3 硬件。在这种情况下,您将无法安装 FMUv3 硬件。
TIP
更多信息,请参见 启动程序更新.
# 更多信息
- QGroundControl 用户指南 > 固件 (打开新窗口).
- PX4 安装视频 (打开新窗口) (Youtube)
← Pixhawk 接线快速入门 机身 →