# Acro 模式(多旋翼飞行器)


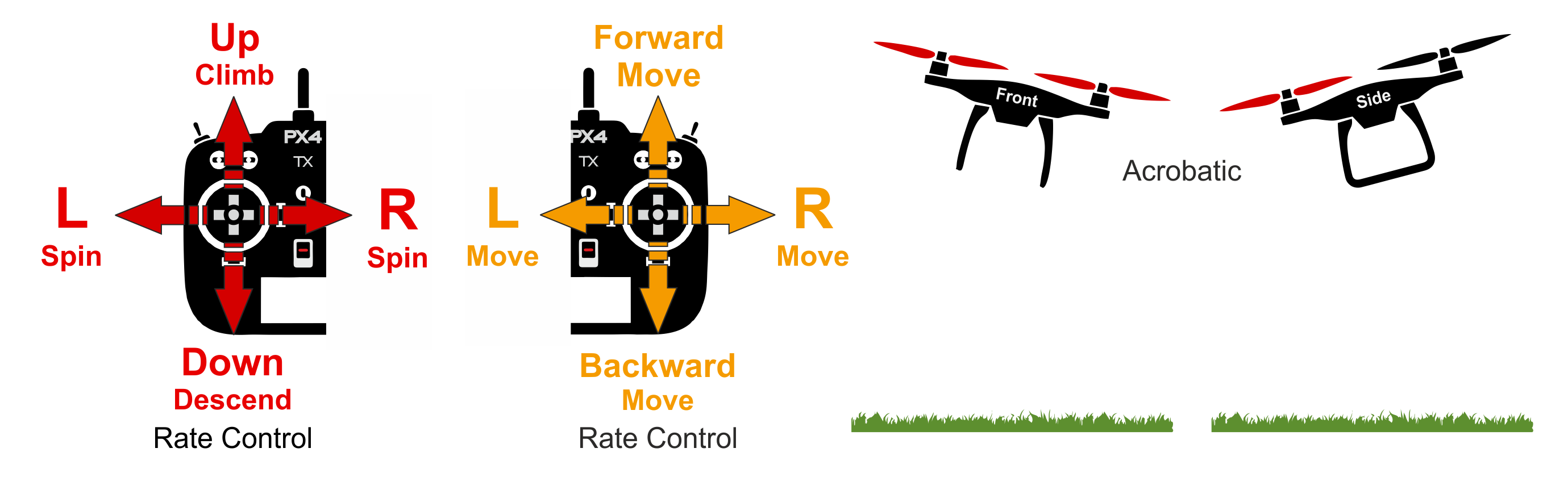
Acro 模式 是用于进行杂技表演的遥控模式,如空翻、翻滚和绕圈。
滚动杆、俯仰杆和偏航杆控制围绕各自轴线的角度旋转速度,油门直接传递到输出混合器。当摇杆居中时,飞行器将停止旋转,但仍保持当前方向(侧向、倒置或其他),并根据当前动量移动。
# 技术说明
遥控/手动模式,可进行空翻、翻滚和绕圈等杂技表演。
RC RPY 摇杆输入可控制绕各自轴线的角度旋转速率。当摇杆居中时,飞行器将停止旋转,但仍保持当前方向(不一定是水平的)。
# 摇杆输入映射
Acro 模式的默认滚转、俯仰和偏航输入杆映射如下所示。该曲线可在最大摇杆输入时实现较高的转弯率,以执行杂技表演,同时在靠近摇杆中心的区域灵敏度较低,可进行小幅度修正。
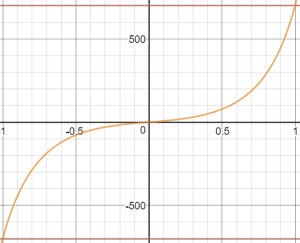
这种滚动和俯仰输入杆响应可以使用 MC_ACRO_EXPO 和 亚洲超级博览会 参数,而偏航杆输入响应则使用 MC_ACRO_EXPO_Y 和 麦克超商.
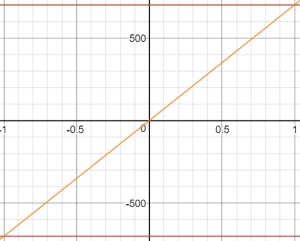
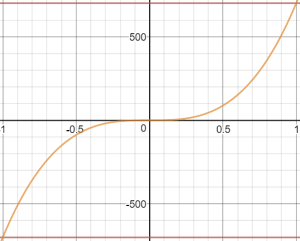
MC_ACRO_EXPO 和 MC_ACRO_EXPO_Y 如下图所示,在直线和三次方曲线之间调整曲线。
亚洲超级博览会 和 麦克超商 可以进一步调整形状,修改灵敏度降低区域的宽度。
备注
数学关系是
f = MC_ACRO_EXPO 或 MC_ACRO_EXPO_Y, g = MC_ACRO_SUPEXPO 或 麦克超商以及 r 为最大速率。
您可以尝试以下关系 这里 (打开新窗口).
# 参数
| 参数 | 说明 |
|---|---|
| MC_ACRO_EXPO | Acro 模式的指数因子,用于调整滚动和俯仰的摇杆输入曲线形状。数值:0 纯线性输入曲线 1 纯立方输入曲线。默认值:0.69。 |
| MC_ACRO_EXPO_Y | Acro 模式用于调整偏航杆输入曲线形状的指数因子。数值:0 纯线性输入曲线 1 纯立方输入曲线。默认值:0.69。 |
| 亚洲超级博览会 | Acro 模式 "SuperExpo"系数,用于改进滚动轴和俯仰轴的摇杆输入曲线形状(使用 MC_ACRO_EXPO.数值:0 为纯粹的世博功能,0.7 为直观的摇杆手感提供合理的形状增强,0.95 为非常强的弯曲输入曲线,只有在最大值附近才有效果。默认值:0.7。 |
| 麦克超商 | Acro 模式 "SuperExpo"系数,用于改进偏航轴的摇杆输入曲线形状(使用 MC_ACRO_EXPO_Y.数值:0 为纯粹的世博功能,0.7 为直观的摇杆手感提供合理的形状增强,0.95 为非常强的弯曲输入曲线,只有在最大值附近才有效果。默认值:0.7。 |
| MC_ACRO_P_MAX | 最大俯仰速度。默认值:每秒 2 转(720.0 度/秒)。 |
| MC_ACRO_R_MAX | 最大横滚速度。默认值:每秒 2 转(720.0 度/秒)。 |
| MC_ACRO_Y_MAX | 最大偏航率。默认值:1.5 转/秒(540.0 度/秒)。 |