# ARK 流量
ARK Flow 是一款开源 UAVCAN 光流, 距离传感器和 IMU 模块。

# 购买地点
从以下网站订购该模块
- ARK 电子 (打开新窗口) (美国)
# 规格
- 开源原理图和 BOM (打开新窗口)
- 运行 PX4 开放源码固件 (打开新窗口)
- 支持 UAVCAN 固件更新
- 动态 UAVCAN 节点枚举
- 传感器
- PixArt PAW3902 光学流量传感器
- 在 9 勒克斯的超低照度条件下跟踪
- 工作范围广,从 80 毫米到无限远
- 最高 7.4 拉德/秒
- 电路板内置 40mW 红外 LED,可改善弱光下的运行性能
- Broadcom AFBR-S50LV85D 飞行时间距离传感器
- 集成 850 nm 激光光源
- 视场角 (FoV) 为 12.4° x 6.2°,32 个像素
- 典型距离可达 30 米
- 可在高达 200k Lux 的环境光下运行
- 在各种路面条件下都能很好地工作
- 发射器光束为 2° x 2°,可照亮 1 至 3 个像素
- 博世 BMI088 6 轴 IMU
- STM32F412CEU6 单片机
- 两个 Pixhawk 标准 CAN 连接器
- 4 引脚 JST GH
- Pixhawk 标准调试连接器
- 6 引脚 JST SH
- 外形小巧
- 3 厘米 x 3 厘米 x 1.4 厘米
- LED 指示灯
- 美国建造
# 接线/连接
ARK Flow 使用 Pixhawk 标准 4 针 JST GH 电缆连接至 CAN 总线。将其他传感器插入 ARK Flow 的第二个 CAN 接口,即可连接多个传感器。
有关 UAVCAN 接线的一般说明也可在以下网站找到 UAVCAN > 接线.
# 安装/定向
建议的安装方向是将电路板上的连接器指向 车后如下图所示。
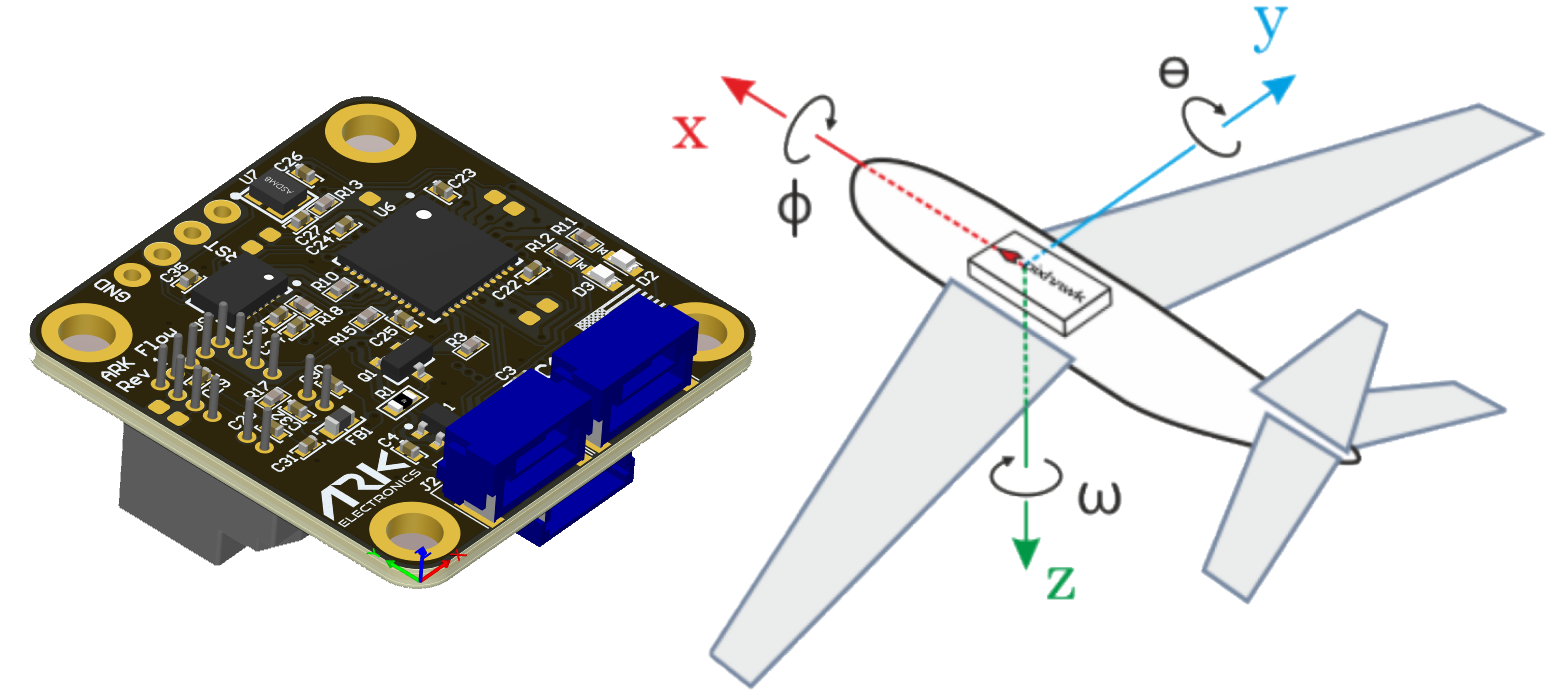
这与默认值 (0)的参数 SENS_FLOW_ROT.如果使用不同的方向,请适当更改参数。
传感器可以安装在车架上的任何位置,但在安装时需要指定相对于载具重心的焦点位置。 PX4 配置.
# PX4 设置
# 启用 UAVCAN
要使用 ARK Flow 板,请将其连接到 Pixhawk CAN 总线,并通过设置参数 UAVCAN_ENABLE 至 2 进行动态节点分配(或 3 如果使用 UAVCAN 电子调速器).
步骤如下
- 在 QGroundControl 设置参数 UAVCAN_ENABLE 至
2或3并重新启动(见 查找/更新参数). - 将 ARK Flow CAN 连接到 Pixhawk CAN。
启用后,模块将在启动时被检测到。流量数据应以 10Hz 的频率到达。
# PX4 配置
在 光流> 估算器> EKF2 以便
- 可融合光学流量测量进行速度计算。
- 如果传感器不在载具中心位置,可定义偏移量。
此外,您可能还需要配置以下参数。
| 参数 | 说明 |
|---|---|
| 传感器流量最大值 | 依靠光流时离地面的最大高度。 |
| 传感器流量最小值 | 依靠光流时离地面的最低高度。 |
| SENS_FLOW_MAXR | 光学流量传感器可可靠测量的最大角流量。 |
| SENS_FLOW_ROT | 木板相对于车体框架的偏航旋转。 |
# 构建方舟流固件
Ark Flow 在出售时附带了最新的固件版本。想要更新到最新版本的开发人员可以使用正常的 PX4 工具链和源代码自行构建和安装。
步骤如下
- 安装 PX4 工具链.
- 克隆 PX4-Autopilot 源,包括 Ark Flow,使用 Git:
Git 克隆 https://github.com/PX4/PX4-Autopilot --recursive CD PX4-自动驾驶仪 - 建立 方舟之流 固件
使方舟能够流动 - 请按照以下说明操作 更新 UAVCAN 固件 使用位于 build/ark_can-flow_default 名为 XX-X.X.XXXXXXXX.uavcan.bin.