# UAVCAN 电调(电机控制器)
PX4 支持 UAVCAN ESCs.它们与 PWM 电子调速器:
- UAVCAN 专为在相对较远的距离上提供稳健可靠的连接而设计。它可以在大型飞行器上安全使用电调,并实现通信冗余。
- 总线是双向的,可以进行健康监测和诊断。
- 由于可以用一条总线连接所有电调和其他 UAVCAN 外围设备,因此布线更加简单。
- 通过手动旋转每个电机来配置电调编号(适用于大多数类型的 UAVCAN 电调),因此设置更为简单。


# 支持 PX4 电调
PX4 可与任何/所有 UAVCAN 电调兼容(一般来说,UAVCAN 是一种即插即用协议)。
备注
在撰写本文时,PX4 支持 UAVCAN v0(非 v1.0)。
从设置角度看,UAVCAN 电调之间的唯一区别是物理连接器和用于配置电机顺序和方向的软件工具可能不同。
一些常用的 UAVCAN 电调固件/产品包括
- 萨波格 (打开新窗口) 固件;一款先进的开源无传感器 PMSM/BLDC 电机控制器固件,设计用于电动无人车的推进系统。
- 线粒体 (打开新窗口) - 集成式无传感器 PMSM/BLDC 电机控制器芯片(用于 ESC 和集成驱动器)
- Myxa (打开新窗口) - 用于轻型无人驾驶飞机和水上飞机的高端 PMSM/BLDC 电机控制器(FOC ESC)。
- VESC 项目 ESC (打开新窗口) (另见 本杰明-维德的博客 (打开新窗口) - 项目业主)
- OlliW 的 UC4H 电调-执行器节点 (打开新窗口)
- 还有一些 在此列出 (打开新窗口)
备注
这份清单是 不详尽/不完整.如果您知道其他的 ESC,请将其添加到列表中!
# 购买
基于 Sapog 的 ESC:
基于线粒体的驱动器和电调:
备注
还有许多其他市售的电子调速器,请在找到它们时添加新的链接!
# 布线/连接
将所有机载 UAVCAN 设备连接成链,并确保总线在末端节点处终止。电调连接/串联的顺序并不重要。
更多信息,请参见 UAVCAN > 接线.
备注
所有 UAVCAN 电调都具有相同的连接结构/接线方式。但请注意,实际的连接器有所不同(例如 祖拜克斯-奥廖尔 20 和 Holybro Kotleta20 使用 Dronecode 标准连接器(JST-GH 4 针),而 VESC 不使用)。
# PX4 配置
要在 PX4 上使用 UAVCAN 电调,需要启用 UAVCAN 驱动程序:
- 使用电池为飞行器供电(必须为整个飞行器供电,而不仅仅是飞行控制器),并连接 QGroundControl.
- 导航至 载具设置 > 参数 屏幕
备注
参数 解释了如何查找和设置参数。
- 设置 UAVCAN_ENABLE 的值 传感器和电机 (3) 然后重启飞行控制器。这样就可以自动枚举电机(电调),如 下一节.
- (可选)设置 uavcan_esc_idlt 为 1,以确保在系统上膛时电机始终至少以空转节流阀运行。
备注
有些系统不会从这种行为中受益,例如滑翔机无人机)。
# 电调设置
虽然 UAVCAN 设备一般 即插即用 您仍然需要对系统中使用的每个电调进行枚举(编号),并设置它们的方向,以便 PX4 能够识别/控制它们。
备注
ESC 索引和方向必须与 机身参考 为载具类型。0-7 个 ESC 索引映射到 MAIN 1-8,而 8-15 个 ESC 索引映射到 AUX 1-8。
每种 UAVCAN 电调的枚举机制都不同(请查阅电调手册中的说明)。下面提供了一些 UAVCAN 电调的设置信息。
# 使用 QGroundControl 对 Sapog ESC 进行枚举
本节将介绍如何枚举任何 基于 Sapog (打开新窗口)-基于电调的 "自动"使用 QGroundControl.
TIP
如果设置中只有一个 ESC,则可以跳过本节,因为默认情况下 ESC 索引已设置为零。
枚举 ESC:
用蓄电池为载具供电并连接 QGroundControl
导航至 载具设置 > 电源 在 QGC 中。
通过按下 开始任务 按钮,如下图所示。
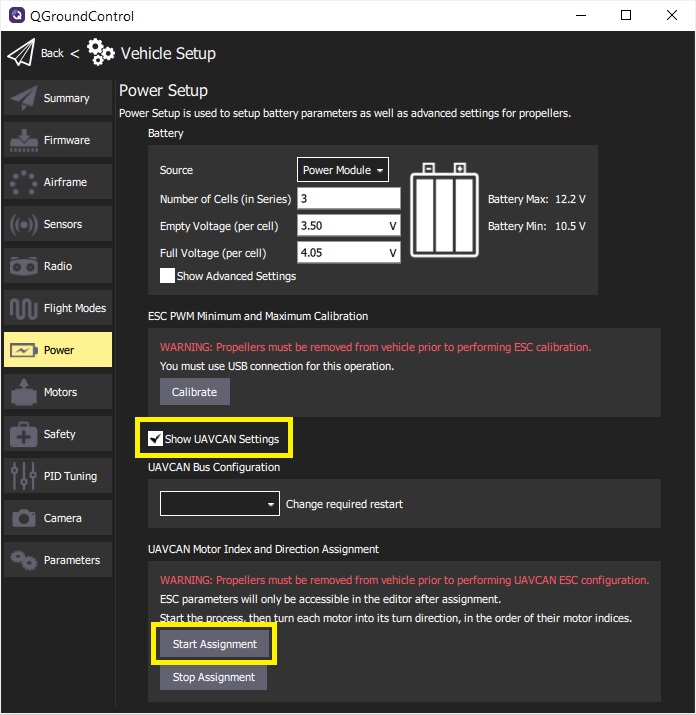
您将听到一声提示音,表明飞行控制器已进入 ESC 枚举模式。
按照正确的旋转方向手动旋转每个电机(如图 5 所示)。 机身参考) ,从第一个电机开始,到最后一个电机结束。每转动一个电机,都会听到一声确认哔声。
备注
确保以正确的方向转动每个电机,因为电调会自动学习并记住方向(即正常运行时顺时针旋转的电机在枚举时也必须顺时针旋转)。
在枚举完最后一个电机后,确认音应改变,以表示枚举程序已完成。
重新启动 PX4 和 Sapog ESC 以应用新的枚举标识。
下面的视频演示了这一过程:
# 使用 Sapog 手动进行 ESC 枚举
TIP
我们建议自动 使用 QGroundControl 对 Sapog ESC 进行枚举 而不是手动枚举(因为手动枚举更简单、更安全)。
您可以使用 UAVCAN 图形用户界面工具 (打开新窗口).这将为每个枚举的 ESC 分配以下 Sapog 配置参数:
esc_indexctl_dir
备注
参见 Sapog 参考手册 (打开新窗口) 了解有关参数的更多信息。
# Myxa 电调设置
Myxa 电机计数 基于 Telega 的电调 (打开新窗口) 通常使用 库切工具 (打开新窗口) (或不太友好的图形用户界面); UAVCAN 图形用户界面工具 (打开新窗口)).
这里有一些指导: Myxa v0.1 快速入门指南 (打开新窗口) (祖巴茨博客)。
# VESC 电调设置
对于 VESC ESC (打开新窗口) 电机计数的首选工具是 VESC 工具 (打开新窗口).除了需要在 VESC 工具中设置正常的电机配置外,还需要正确设置应用程序配置。建议的应用程序设置如下:
| 参数 | 选项 |
|---|---|
| 使用应用程序 | 无应用程序 |
| VESC ID | 1,2,... |
| 罐状态信息模式 | can_status_1_2_3_4_5 |
| CAN 波特率 | CAN_BAUD_500K |
| CAN 模式 | UAVCAN |
| UAVCAN ESC 索引 | 0,1,... |
VESC ID 的电机编号应与 PX4 的惯例相同,以 1 用于右上角电机、 2 左下电机等。但是 UAVCAN ESC 索引 从 0因此,它总是比 VESC ID.例如,在四旋翼飞行器中,左下角的电机将有 VESC ID = 2 和 UAVCAN ESC 索引 = 1.
最后 CAN 波特率 必须与 UAVCAN_BITRATE.
# 故障排除
# 上膛时电机不转
如果 PX4 固件启动,但电机未开始转动,请检查参数 uavcan_enable=3 以使用 UAVCAN 电调。如果在增加推力之前电机没有开始旋转,请检查 uavcan_esc_idlt=1.
# UAVCAN 设备无法获取节点 ID/固件更新失败
PX4 需要 SD 卡用于 UAVCAN 节点分配和固件更新(在启动过程中进行)。检查是否有(可用的)SD 卡并重新启动。
# 更多信息
- PX4/Sapog (打开新窗口) (Github)
- Sapog v2 参考手册 (打开新窗口)
- UAVCAN 设备互连 (打开新窗口) (Zubax KB)
- 在 PX4 上使用基于 Sapog 的电调 (打开新窗口) (Zubax KB)