# 光流
光流 使用向下摄像头和向下距离传感器进行速度估算。
视频:使用 ARK 流量传感器进行速度估算的 PX4 保持位置(单位:千米)。 位置模式).
# 设置
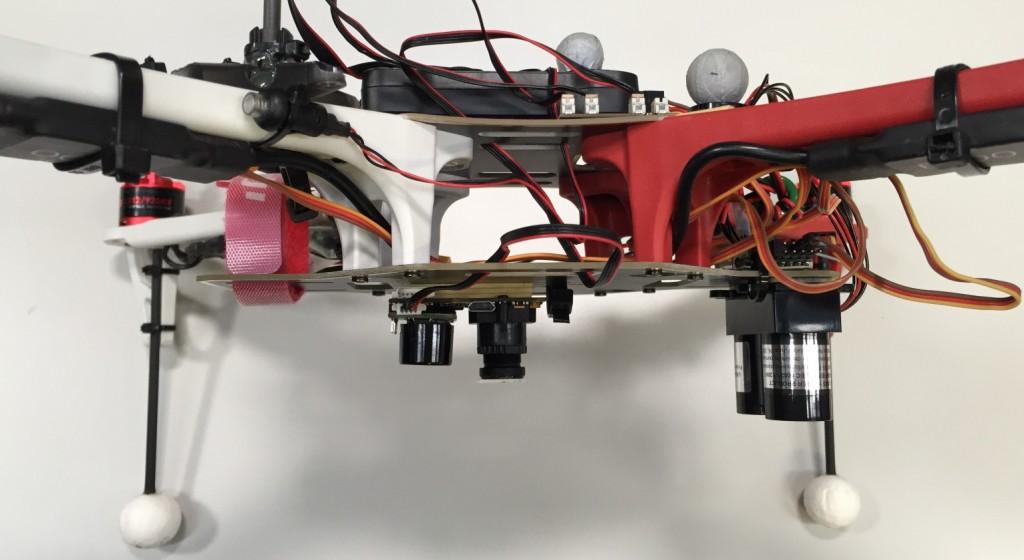
光流设置需要一个朝下的摄像头和一个 距离传感器 (最好是激光雷达)。这些设备可通过 MAVLink、I2C 或任何其他支持外设的总线连接。
备注
如果通过 MAVLink 与 PX4 连接,光流设备必须发布到 光流辐射 (打开新窗口) 主题,而距离传感器必须发布到 传感器 (打开新窗口) 主题。
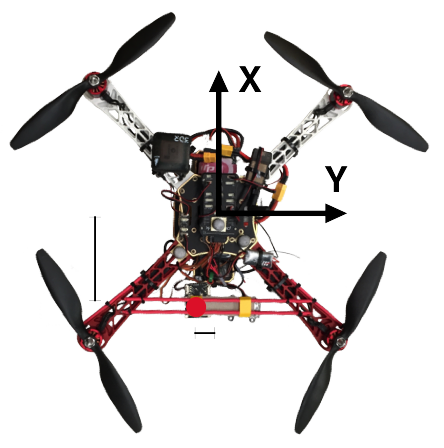
向不同方向运动时的流量输出必须如下:
| 载具移动 | 综合流量 |
|---|---|
| 前锋 | + Y |
| 向后 | - Y |
| 对 | - X |
| 左侧 | + X |
对于纯旋转 integrated_xgyro 和 集成_x (分别为 integrated_ygyro 和 综合_y) 必须相同。
来自光流装置的传感器数据与其他速度数据源进行融合。用于融合传感器数据的方法以及与载具中心的任何偏移都必须在 估计者.
# 流量传感器/摄像头
# PX4Flow
PX4Flow 是一种光学流量相机,可在室内和室外微光条件下工作,无需 LED 照明。它是计算光流的最简单、最成熟的方法之一。
# ARK 流量
ARK 流量 是一个 UAVCAN 光学流量传感器 距离传感器和 IMU。它配有 PAW3902 光流量传感器、Broadcom AFBR-S50LV85D 30 米距离传感器和 BMI088 IMU。
# 基于 PMW3901 的传感器
PMW3901 是一种光学流量跟踪传感器,类似于电脑鼠标,但工作范围在 80 毫米到无限远之间。它被用于许多产品中,包括 Bitcraze、Tindie、Hex、Thone 和 Alientek 的一些产品。
# 其他摄像头/传感器
也可以使用集成有摄像头的电路板/四通道板。为此 光流软件仓库 (打开新窗口) (另见 snap_cam (打开新窗口)).
# 测距仪
您可以使用任何支持的 距离传感器.不过,我们建议使用激光雷达而不是声纳传感器,因为激光雷达坚固耐用,精度高。
# 估算器
估计器可融合来自光流传感器和其他来源的数据。必须为所使用的估算器指定融合方式的设置以及与载具中心的相对偏移。
如下图所示,偏移量是相对于载具方向和中心计算得出的:
基于光流的导航由两种可用的估计器启用:EKF2 和 LPE(已废弃)。
# 扩展卡尔曼滤波器 (EKF2)
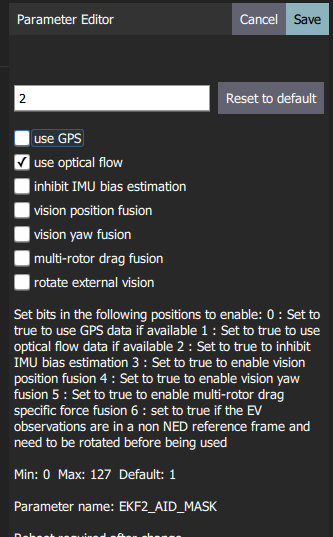
要使用 EKF2 进行光流融合,请在 EKF2_AID_MASK 参数,如下面使用 QGroundControl 所示:
如果光流量传感器偏离载具中心,可以使用以下参数进行设置。
| 参数 | 说明 |
|---|---|
| EKF2_OF_POS_X | 光流焦点在主体框架中的 X 位置(默认为 0.0m)。 |
| EKF2_OF_POS_Y | 光流焦点在主体框架中的 Y 位置(默认为 0.0m)。 |
| EKF2_OF_POS_Z | 光流焦点在主体框架中的 Z 位置(默认为 0.0 米)。 |