# Hex Cube 黑色飞行控制器
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 (打开新窗口) 硬件支持或合规问题。
TIP
立方体橙色 是该产品的后续产品。不过,我们建议考虑基于行业标准的产品,例如 Pixhawk 标准.该飞行控制器没有遵循标准,而是使用了专利连接器。
黑色六角立方体 (打开新窗口) 飞行控制器(以前称为 Pixhawk 2.1)是一种灵活的自动驾驶仪,主要面向商用系统制造商。它基于 Pixhawk 项目 (打开新窗口) FMUv3 开放式硬件设计,并在 NuttX (打开新窗口) 操作系统
控制器设计用于特定领域的载板,以减少布线、提高可靠性和便于组装。例如,用于商业检查载具的载板可能包括配套计算机的连接,而用于竞赛的载板可能包括载具框架上的电调装置。
Cube 包括两个 IMU 的隔振装置,第三个固定的 IMU 作为参考/备份。
备注
制造商 立方体文件 (打开新窗口) 包含详细信息,包括 立方体颜色之间的差异 (打开新窗口).
TIP
该自动驾驶仪 支持 由 PX4 维护和测试小组负责。
# 主要功能
- 32 位 STM32F427 Cortex-M4F (打开新窗口)® 带 FPU 的内核
- 168 MHz / 252 MIPS
- 256 KB 内存
- 2 MB 闪存(完全可访问)
- 32 位 STM32F103 故障安全协处理器
- 14 个 PWM/伺服输出(8 个带故障安全和手动超控,6 个辅助输出,大功率兼容)
- 为附加外设(UART、I2C、CAN)提供丰富的连接选项
- 用于飞行中恢复和手动控制的集成备份系统,配有专用处理器和独立电源(固定翼飞机使用)。
- 备用系统集成了混合功能,提供一致的自动驾驶和手动超控混合模式(固定翼使用)
- 冗余电源输入和自动故障切换
- 外部安全开关
- 多色 LED 主视觉指示灯
- 大功率多音压电音频指示器
- microSD 卡,可进行长时间高速记录
# 购买地点
黑色立方体 (打开新窗口) (ProfiCNC)
# 装配
# 规格
# 处理器
- 32 位 STM32F427 Cortex M4 (打开新窗口) 带 FPU 的内核
- 168 MHz / 252 MIPS
- 256 KB 内存
- 2 MB 闪存(完全可访问)
- 32 位 STM32F103 故障安全协处理器
# 传感器
- 待定
# 接口
- 5 个 UART(串行端口),1 个高功率,2 个带硬件流量控制
- 2 个 CAN(一个带内置 3.3V 收发器,一个带扩展连接器)
- Spektrum DSM / DSM2 / DSM-X® 卫星兼容输入
- 与 Futaba S.BUS® 兼容的输入和输出
- PPM 和信号输入
- RSSI(PWM 或电压)输入
- I2C
- SPI
- 3.3v ADC 输入
- 内部微型 USB 端口和外部微型 USB 端口扩展
# 电力系统和保护
- 具有自动故障切换功能的理想二极管控制器
- 伺服轨大功率(最大 10V)和大电流(10A+)就绪
- 所有外设输出均受过流保护,所有输入均受 ESD 保护
# 额定电压
如果提供三个电源,Pixhawk 可以实现三冗余供电。这三个轨道是电源模块输入、伺服轨输入和 USB 输入。
# 正常运行 最大额定值
在这些条件下,所有电源将按以下顺序为系统供电
- 电源模块输入(4.8V 至 5.4V)
- 伺服轨输入(4.8V 至 5.4V) 用于手动控制的最高电压为 10 伏,但如果没有电源模块输入,自动驾驶仪部分在 5.7 伏以上将无法供电
- USB 电源输入(4.8V 至 5.4V)
# 绝对最大额定值
在这种情况下,系统将不消耗任何电能(将无法运行),但仍将保持完好。
- 电源模块输入(4.1V 至 5.7V,0V 至 20V 未损坏)
- 伺服轨输入(4.1V 至 5.7V,0V 至 20V)
- USB 电源输入(4.1V 至 5.7V,0V 至 6V)
# 引脚和示意图
电路板原理图和其他文档可在此处找到: 立方体项目 (打开新窗口).
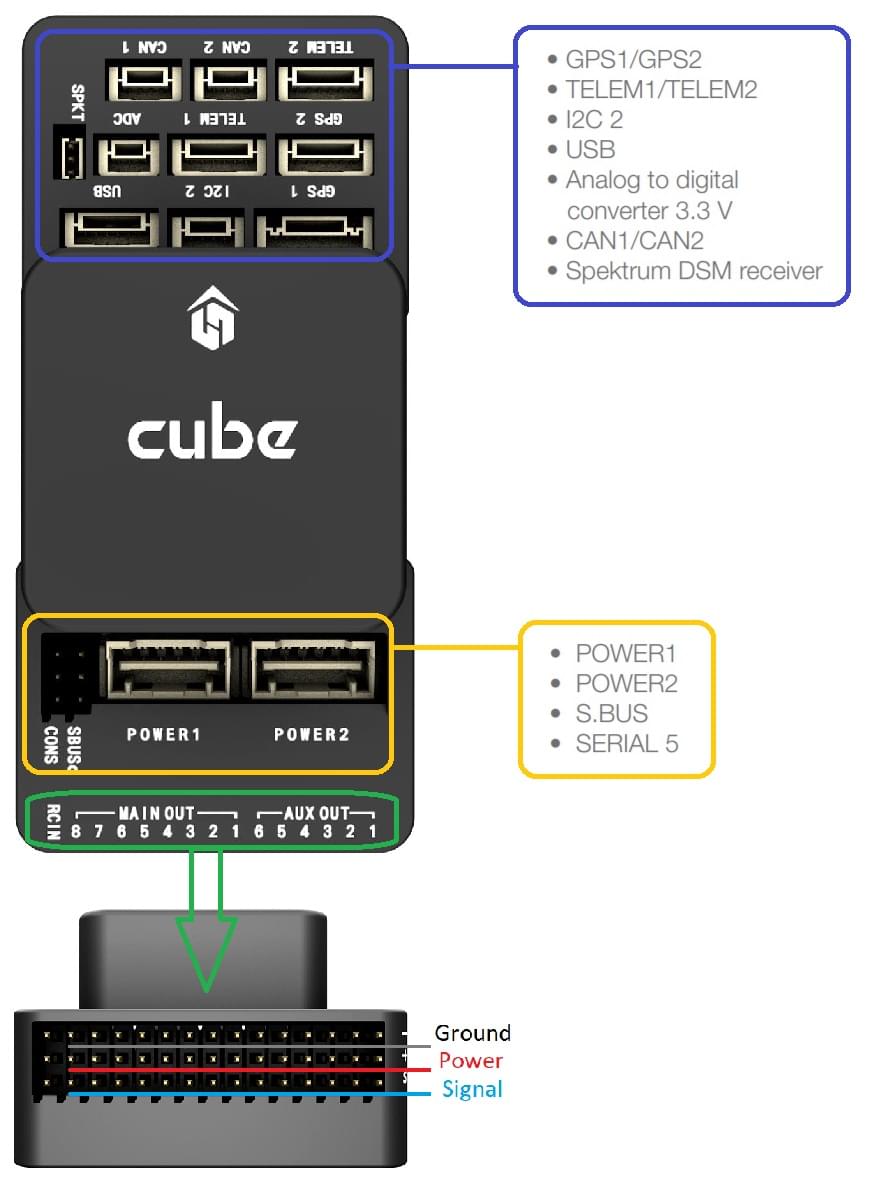
# 港口
# 顶部(GPS、TELEM 等)
# 串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | 控制台 |
| UART8 | /dev/ttyS6 |
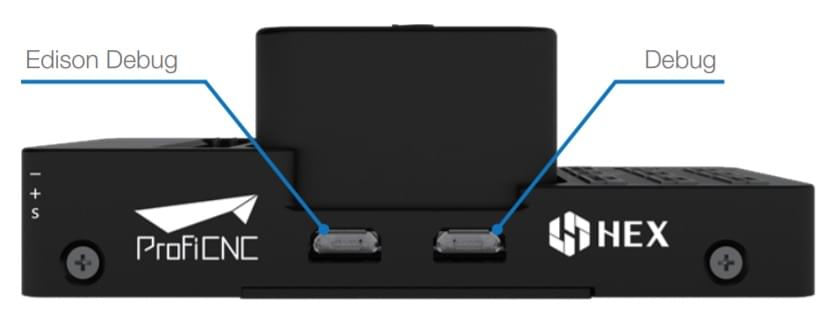
# 调试端口
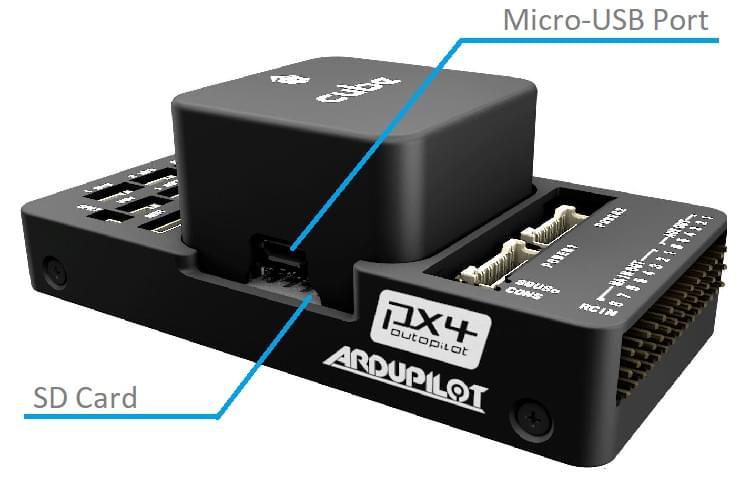
# USB/SDC 卡端口
# 构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v3_default
# 问题
Cube Black 上的 CAN1 和 CAN2 丝网被翻转(CAN1 为 CAN2,反之亦然)。
# 更多信息/文件
- 立方体接线快速入门
- Cube Docs(制造商):