# LightWare SF1X/SF02/LW20 激光雷达
LightWare 公司开发了一系列适合安装在无人机上的轻型通用激光高度计(激光雷达)。这些激光高度计可用于地形跟踪、精确悬停(如摄影)、法规高度限制警告、防碰撞感应等应用。

# 支持的机型
PX4 支持以下型号,可连接到 I2C 或串行总线(下表说明了每种型号可使用的总线)。
# 可用
| 模型 | 范围(米) | 巴士 | 说明 |
|---|---|---|---|
| SF11/C (打开新窗口) | 120 | 串行或 I2C 总线 | |
| LW20/C (打开新窗口) | 100 | I2C 总线 | 防水(IP67),带伺服功能,适用于感应和避雷应用 |
# 已停产
制造商不再提供以下型号。
| 模型 | 范围 | 巴士 |
|---|---|---|
| SF02 (打开新窗口) | 50 | 串行 |
| SF10/A (打开新窗口) | 25 | 串行或 I2C |
| SF10/B (打开新窗口) | 50 | 串行或 I2C |
| SF10/C | 100m | 串行或 I2C |
| LW20/B | 50 | I2C 总线 |
# I2C 设置
请查看上表,确认哪些型号可以连接到 I2C 端口。
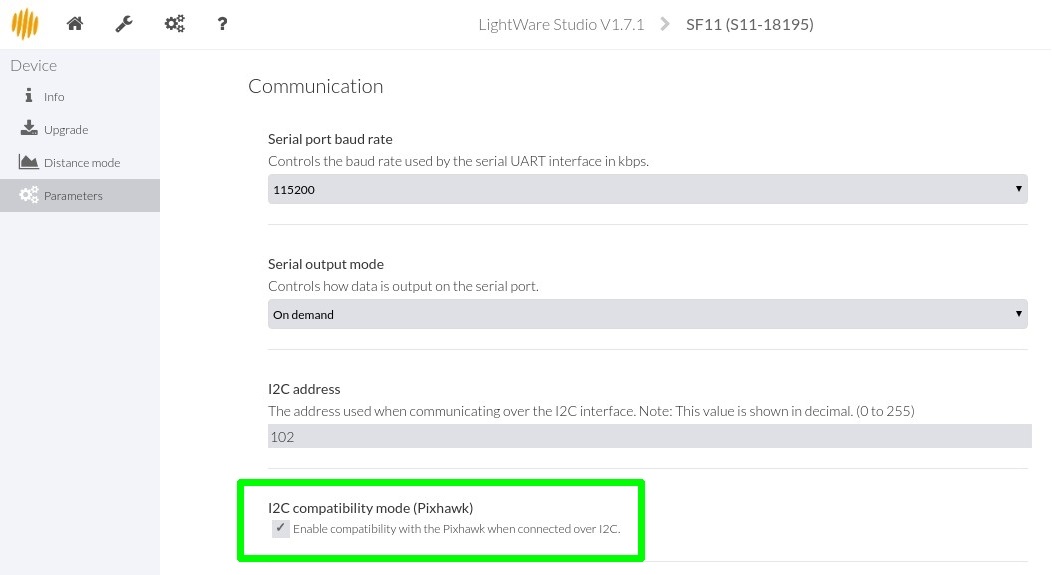
# 激光雷达配置
该硬件出厂时默认未启用 Pixhawk I2C 兼容性。要启用支持,必须下载 LightWare Studio (打开新窗口) 并得到了 参数 > 通信 并打勾标记 I2C 兼容模式(Pixhawk)
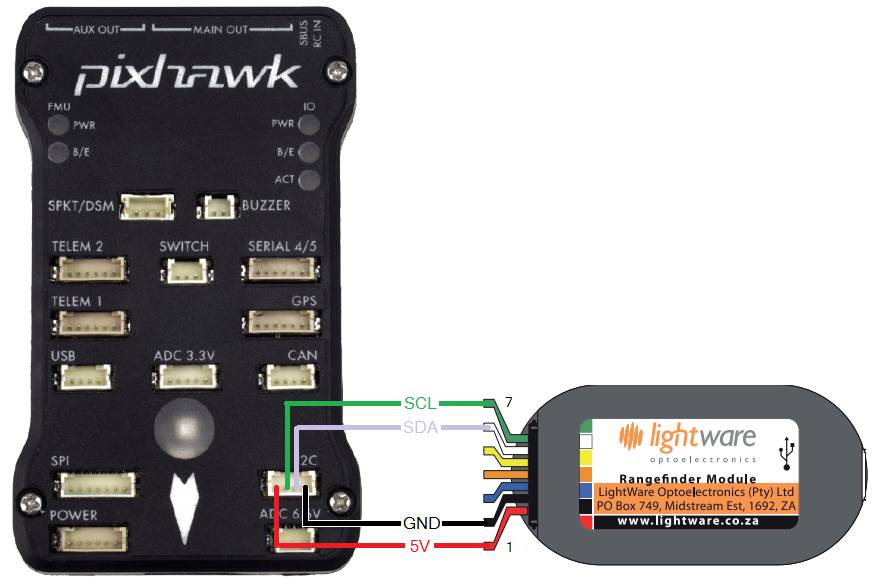
# 硬件
如下图所示将激光雷达连接到自动驾驶仪的 I2C 端口(此处为 Pixhawk 1).
备注
某些旧版本无法与 PX4 一起使用。具体来说,它们可能被错误配置为 I2C 地址等于 0x55这与 rgbled 模块。在 Linux 系统上,您可以使用 i2cdetect (打开新窗口).如果 I2C 地址等于 0x66 该传感器可与 PX4 一起使用。
# 参数设置
设置 SENS_EN_SF1XX 参数以匹配测距仪型号,然后重新启动。
# 串行设置
# 硬件
激光雷达可以连接到任何未使用的 串行端口 (UART),例如TELEM2、TELEM3、GPS2 等。
# 参数设置
配置串行端口 激光雷达将使用 SENS_SF0X_CFG.无需设置端口的波特率,因为波特率由驱动程序配置。
备注
如果配置参数在 QGroundControl 那么您可能需要 为固件添加驱动程序.
然后设置 SENS_EN_SF0X 参数,以匹配测距仪型号并重新启动。