# 降落伞
可将 PX4 配置为在下列情况下触发降落伞 飞行终止.
降落伞可连接到自由 PWM 输出端,或通过 MAVLink.
备注
在飞行终止期间,PX4 会关闭所有控制器,将所有 PWM 输出(包括连接到 PWM 输出的输出)设置为故障安全值,并触发所有连接的 MAVLink 降落伞。
因此,您可以使用该功能激活连接到不同输出端的多个互补安全装置。更多信息请参见 飞行终端配置.
# 使用降落伞
以下是使用降落伞时的一些注意事项:
- 降落伞并不能保证飞行器不会被摧毁或造成伤害!您必须时刻牢记飞行安全。
- 降落伞需要小心使用才能发挥效用。例如,必须正确折叠。
- 降落伞有一个最低有效高度。
- 飞行器倒立时可能会触发降落伞。这将增加减速所需的时间,并可能导致无人机崩溃降落伞。
- 降落伞只有在飞行控制器通电且 PX4 正常运行的情况下才会展开(除非它是独立于 PX4 触发的)。如果出现导致飞行算法池崩溃的情况,降落伞将不会展开。
# 降落伞设置
飞行终止(以及降落伞展开)可由安全检查(如遥控失灵、违反地理围栏等)、姿态触发器和其他故障检测器检查或地面站的指令触发。在飞行终止期间,PX4 会将 PWM 输出设置为故障安全值(故障安全值会关闭电机,但可用于打开/触发降落伞)。如果 MAVLink 降落伞已连接且健康,则将发送命令激活它。
因此,降落伞的安装包括
- 配置 飞行终止 在安全和故障情况下,应将降落伞展开作为适当的行动。
- 配置 PX4,以便在飞行终止时展开降落伞(适当设置 PWM 输出电平或发送 MAVLink 降落伞展开命令)。
- 配置 PX4 输出电平,以便在故障安全时禁用电机。这是默认值,因此通常不需要任何设置(对于伺服系统,这是中心值)。
# 启用飞行终止
启用飞行终止:
- 设置 安全 行动 航班终止 用于检查是否需要触发降落伞。
- 设置 故障探测器 设置俯仰角、滚动角和碰撞/翻转检测时间触发器,并禁用故障/IMU 超时断路器(即设置为"......")。 cbrk_flightterm=0).
备注
您还可以配置 外部自动触发系统 (ATS) 进行故障检测。
# 降落伞输出总线设置
如果降落伞由 PWM 或 CAN 输出触发,则必须首先将其连接到一个未使用的输出(在本例中,我们假设使用了 AUX PWM 输出 6)。您可能还需要单独为降落伞伺服供电。这可以通过将 5V BEC 连接到飞行控制器舵机轨来实现,并通过它为降落伞供电。
然后,您需要确保降落伞引脚的设置值能够在发生故障安全时触发降落伞。
在 PX4 v1.13(默认)及更早版本中:
- 设置 PWM_AUX_DIS6 至降落伞"OFF"位置的 PWM 值(通常在 700 至 1000ms 之间)
- 设置 PWM_AUX_DIS6 至降落伞"ON"位置的 PWM 值(通常在 1800 至 2200ms 之间)
备注
上述数值适用于来自以下设备的弹簧式发射器 水果槽 (打开新窗口).您需要使用适合您降落伞的数值。
如果启用了动态控制分配 (sys_ctrl_alloc=1):
开放 致动器 在 QGroundControl 中
指定 降落伞 功能到
AUX6输出: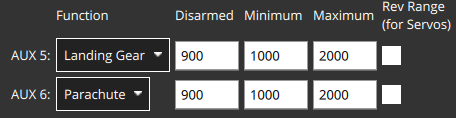
设置适当的 PWM 值。触发故障安全时,输出会自动设置为最大 PWM 值。
# MAVLink 降落伞设置
PX4 将通过发送以下命令触发已连接且健康的失控保护降落伞 mav_cmd_doo_parachute (打开新窗口) 与 释放降落伞 (打开新窗口) 行动。
通过设置参数 com_parachute=1.然后,PX4 将使用 mav_sys_status_recovery_system (打开新窗口) 位中的 SYS_STATUS (打开新窗口) 扩展机载控制传感器领域:
SYS_STATUS.onboard_control_sensors_present_extended:存在 MAVLink 降落伞(基于心跳检测)。SYS_STATUS.onboard_control_sensors_enabled_extended: ?SYS_STATUS.onboard_control_sensors_health_extended:MAVLink 降落伞健康(基于心跳检测)。
MAVLink 降落伞需要发射一个 心跳 (打开新窗口) 与 HEARTBEAT.type 的 mav_type_parachute (打开新窗口).
# 降落伞测试
警告
第一次测试时,请在工作台上进行,不使用螺旋桨,使用空载降落伞装置!
备注
无法从终止状态恢复!您需要重新启动载具/对载具进行电源循环,以进行后续测试。
降落伞会在 飞行终止.
测试(真实)降落伞的最简单方法是启用 故障检测器姿态触发器 使载具翻倒。
您还可以在 Gazebo 中模拟降落伞/飞行终止: 开发> 模拟> 仿真场景Gazebo> 模拟降落伞/飞行终止.