# UAVCAN
![]() UAVCAN (打开新窗口) 是一种机载网络,允许自动驾驶仪与航空电子设备/外围设备连接。它使用坚固耐用的差分信号,支持通过总线进行固件升级和外围设备的状态反馈。
UAVCAN (打开新窗口) 是一种机载网络,允许自动驾驶仪与航空电子设备/外围设备连接。它使用坚固耐用的差分信号,支持通过总线进行固件升级和外围设备的状态反馈。
备注
PX4 需要 SD 卡用于 UAVCAN 节点分配和固件升级。UAVCAN 在飞行过程中不会使用它。
# 支持的硬件
它支持的硬件包括
- 电调/电机控制器
- 空速传感器
- 用于 GPS 和 GLONASS 的全球导航卫星系统接收器
- 功率监控器
- 距离传感器
- 光流
备注
PX4 不支持 UAVCAN 伺服器(在编写本报告时)。
# 布线
所有 UAVCAN 组件均采用相同的连接架构/接线方式。将所有板载 UAVCAN 设备连接成链,并确保总线在末端节点处终止(节点连接/链的顺序并不重要)。
下图显示了飞行控制器连接到 UAVCAN 电机控制器(电调) 和一个 UAVCAN 全球导航卫星系统。
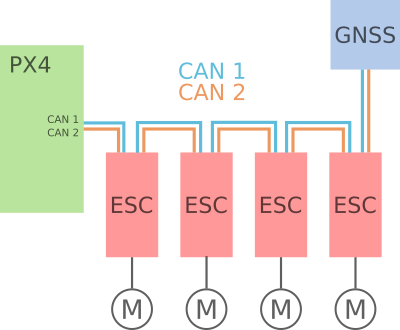
图中未显示任何电源接线。请参阅制造商的说明,确认组件是否需要单独供电,或者是否可以通过 CAN 总线本身供电。
有关正确连接公交车的更多信息,请参阅 UAVCAN 设备互连 (打开新窗口) (Zubax KB)。
备注
- 虽然连接方式相同,但 连接器 不同的设备可能会有所不同。
- 如上图(CAN2)所示,可以使用第二个/冗余 CAN 接口。这是可选项,但可以提高连接的稳健性。
# PX4 配置
要在 PX4 中使用 UAVCAN 组件,首先需要启用 UAVCAN 驱动程序:
使用电池为飞行器供电(必须为整个飞行器供电,而不仅仅是飞行控制器),并连接 QGroundControl.
导航至 载具设置 > 参数 屏幕
UAVCAN_ENABLE 必须 设置 为其中一个非零值。
这些值是
0:禁用 UAVCAN 驱动程序。1:传感器 手动配置2:传感器 自动配置3:传感器和执行器 (ESC) 自动配置
使用
1如果 无 所连接的 UAVCAN 设备支持自动配置(请查看手册!)、2或3如果 一些 其中支持自动配置,以及3如果您使用的是 UAVCAN 电调(将电机控制分配到 UAVCAN 总线而不是 PWM)。
备注
您需要为任何不支持自动配置的节点手动分配静态 ID。使用动态配置时,任何手动分配的 id 值都应大于 UAVCAN 设备的数量(以避免冲突)。
大多数 UAVCAN 传感器无需进一步设置(即插即用,除非在其文档中有特别说明)。
UAVCAN 电机控制器(电调) 此外,还需要设置电机顺序,并可能需要设置一些其他参数。能否使用简单的 QGroundControl 设置用户界面完成这些设置取决于电调的类型(有关信息,请参阅链接)。
# 故障排除
# UAVCAN 设备无法获取节点 ID/固件更新失败
PX4 需要 SD 卡用于 UAVCAN 节点分配和固件更新(在启动过程中进行)。检查是否有(可用的)SD 卡并重新启动。
# 上膛时电机不转
如果 PX4 固件启动,但电机未开始转动,请检查参数 uavcan_enable=3 以使用 UAVCAN 电调。如果在增加推力之前电机没有开始旋转,请检查 uavcan_esc_idlt=1.
# 开发商信息
- UAVCAN 开发:与开发 UAVCAN 新硬件并将其集成到 PX4 有关的主题。