# ModalAI 飞行核心 v1
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 (打开新窗口) 硬件支持或合规问题。
模态AI 飞行核心 v1 (打开新窗口) (数据表 (打开新窗口))是用于 PX4 的飞行控制器,美国制造。Flight Core 可与 ModalAI VOXL (打开新窗口) (数据表 (打开新窗口))进行避障和 GPS 导航,或作为独立的飞行控制器单独使用。
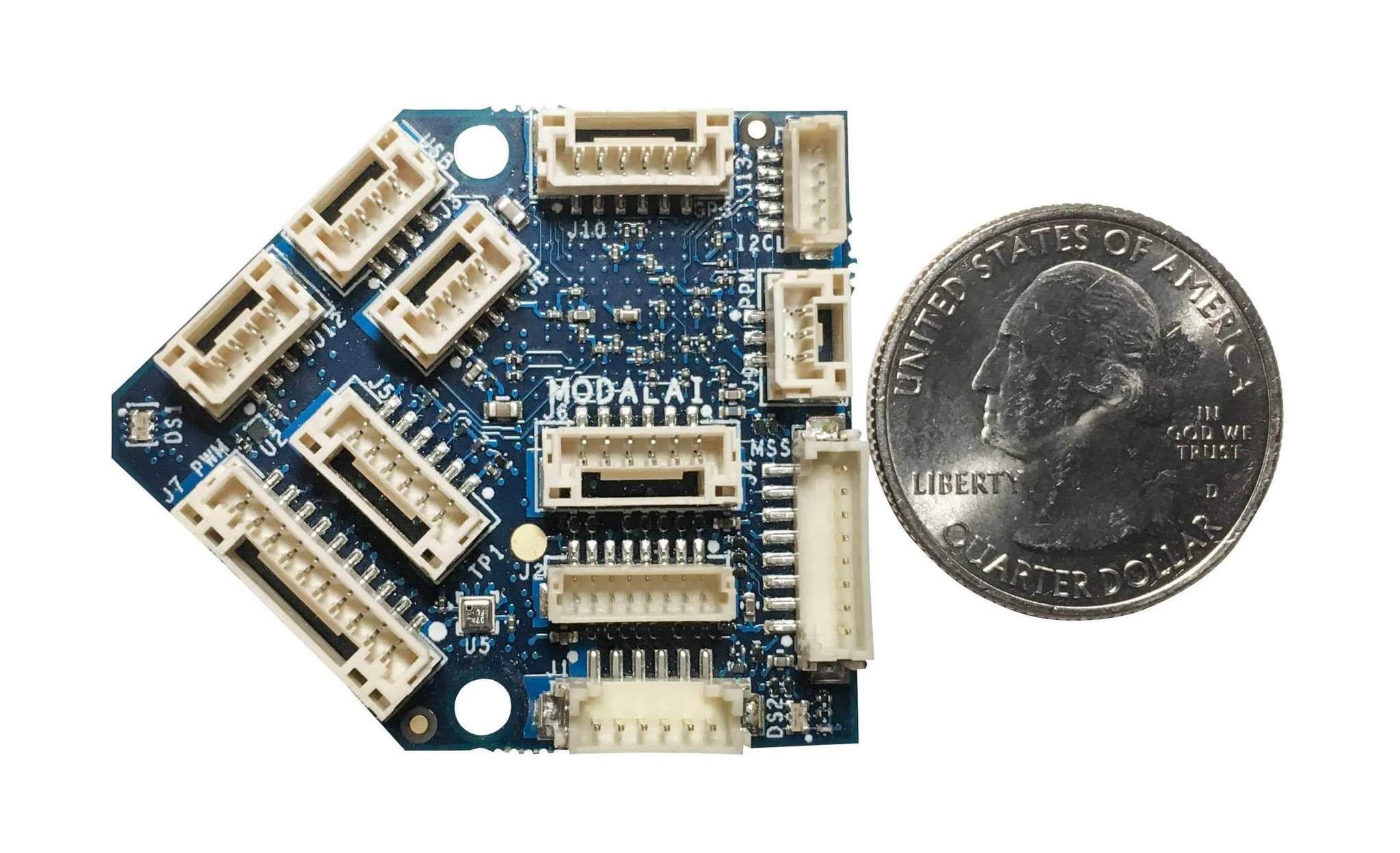
飞行核心部分与 PX4 飞行控制器部分完全相同。 VOXL 航班 (打开新窗口) (数据表 (打开新窗口)),它将 VOXL 配套计算机和飞行核心集成到一块印刷电路板上。
备注
该飞行控制器 支持的制造商.
# 规格
| 特点 | 详细信息 |
|---|---|
| 重量 | 6 g |
| 单片机 | 216MHz、32 位 ARM M7 STM32F765II (打开新窗口) |
| 内存 | 256KB FRAM |
| 2Mbit 闪存 | |
| 512KB SRAM | |
| 固件 | PX4 (打开新窗口) |
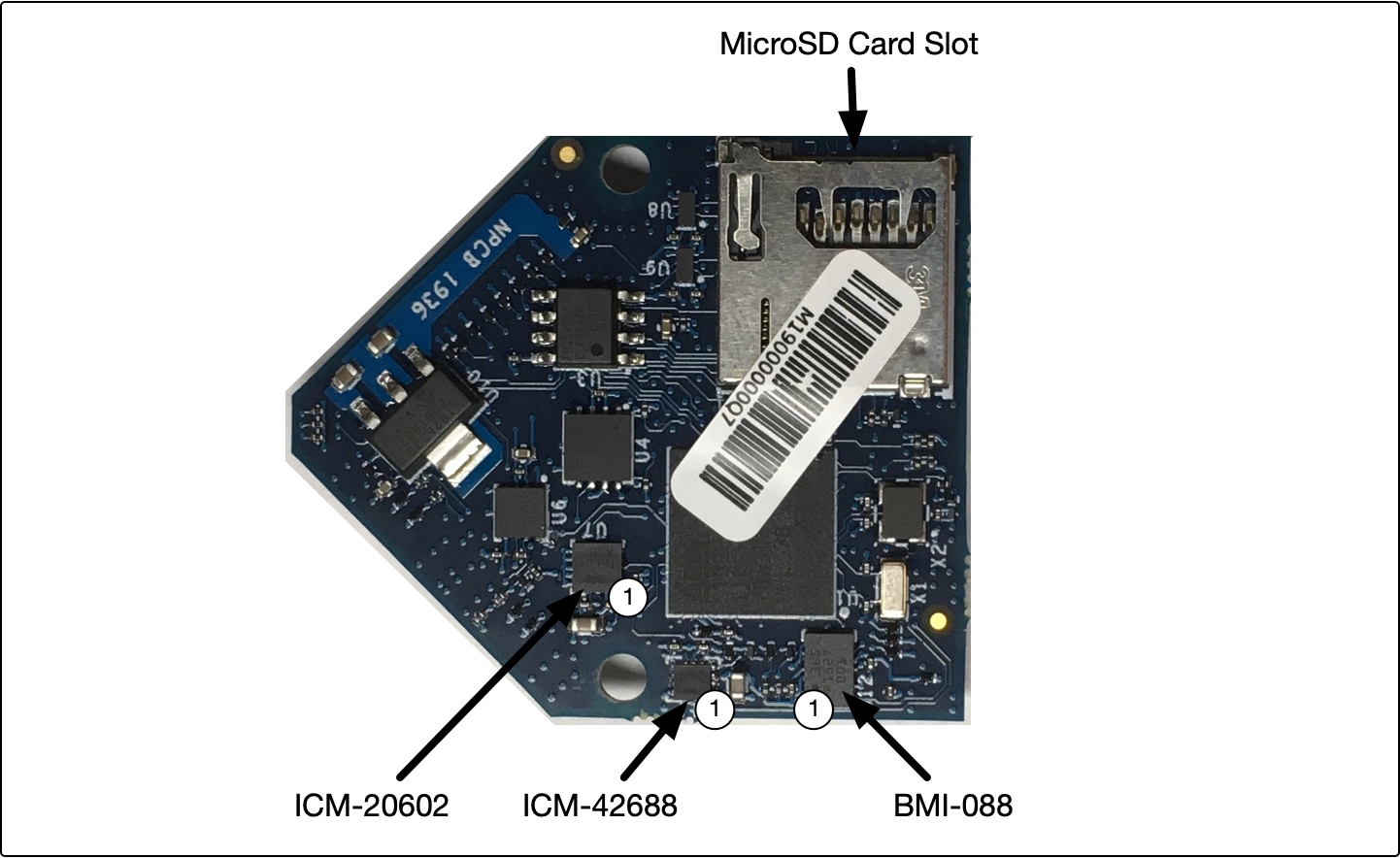
| IMU | ICM-20602 (打开新窗口) (SPI1) |
| ICM-42688(SPI2) | |
| BMI088 (打开新窗口) (SPI6) | |
| 气压计 | BMP388 (打开新窗口) (I2C4) |
| 安全元件 | A71CH (打开新窗口) (I2C4) |
| microSD 卡 | 关于支持的卡的信息 |
| 输入 | GPS/Mag |
| Spektrum | |
| 遥测 | |
| CAN 总线 | |
| PPM | |
| 输出 | 6 个 LED(2xRGB) |
| 8 个 PWM 通道 | |
| 额外接口 | 3 个串行端口 |
| I2C | |
| GPIO |
备注
更详细的硬件文件可参见 这里 (打开新窗口).
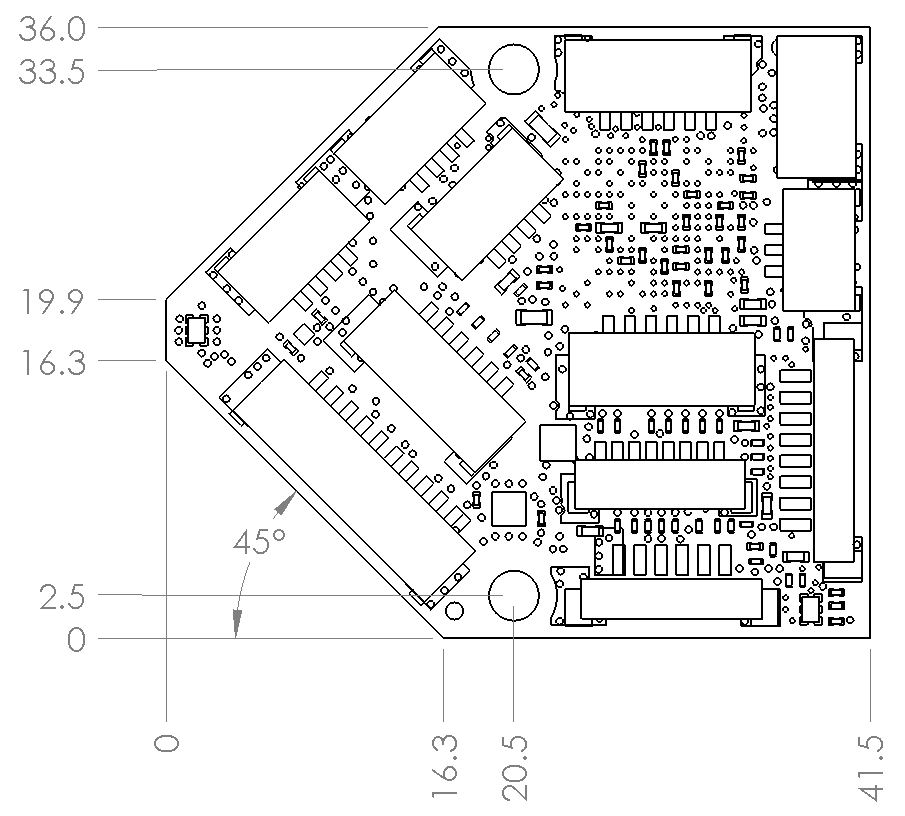
# 尺寸
# PX4 Firwmare 兼容性
飞行核心 v1 完全兼容 PX4 v1.11 版的 PX4 官方固件。
ModalAI 维护一个 分支 PX4 版本 (打开新窗口) PX4 v1.11。其中包括 UART ESC 支持以及 VIO 和 VOA 的改进,计划将这些改进上传到上游。
有关固件的更多信息,请参见 这里 (打开新窗口).
# QGroundControl 支持
QGroundControl 4.0 及更高版本支持该电路板。
# 可用性
- 飞行核心全套设备 (打开新窗口)
- 飞行核心板 (打开新窗口) (仅)
- 飞行核心与 VOXL 配套计算机集成在一块印刷电路板上 (打开新窗口)
- 飞行核心集成了 VOXL 配套计算机和避障摄像机(VOXL Flight Deck)。 (打开新窗口) (数据表 (打开新窗口))
- 装配有 VOXL 和相机的飞行核心系统 (打开新窗口)
# 快速入门
# 定向
下图显示了建议的方向,它对应于 旋转_无 从 PX4 v1.11 版开始(以及在 ModalAI 维护的 PX4 v1.10 分支 (打开新窗口))
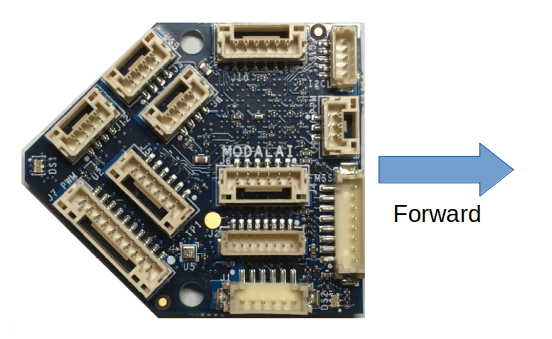
警告
对于 PX4 v1.10 的稳定版本 QGroundControl 使用 旋转_偏航_180 用于上述方向。
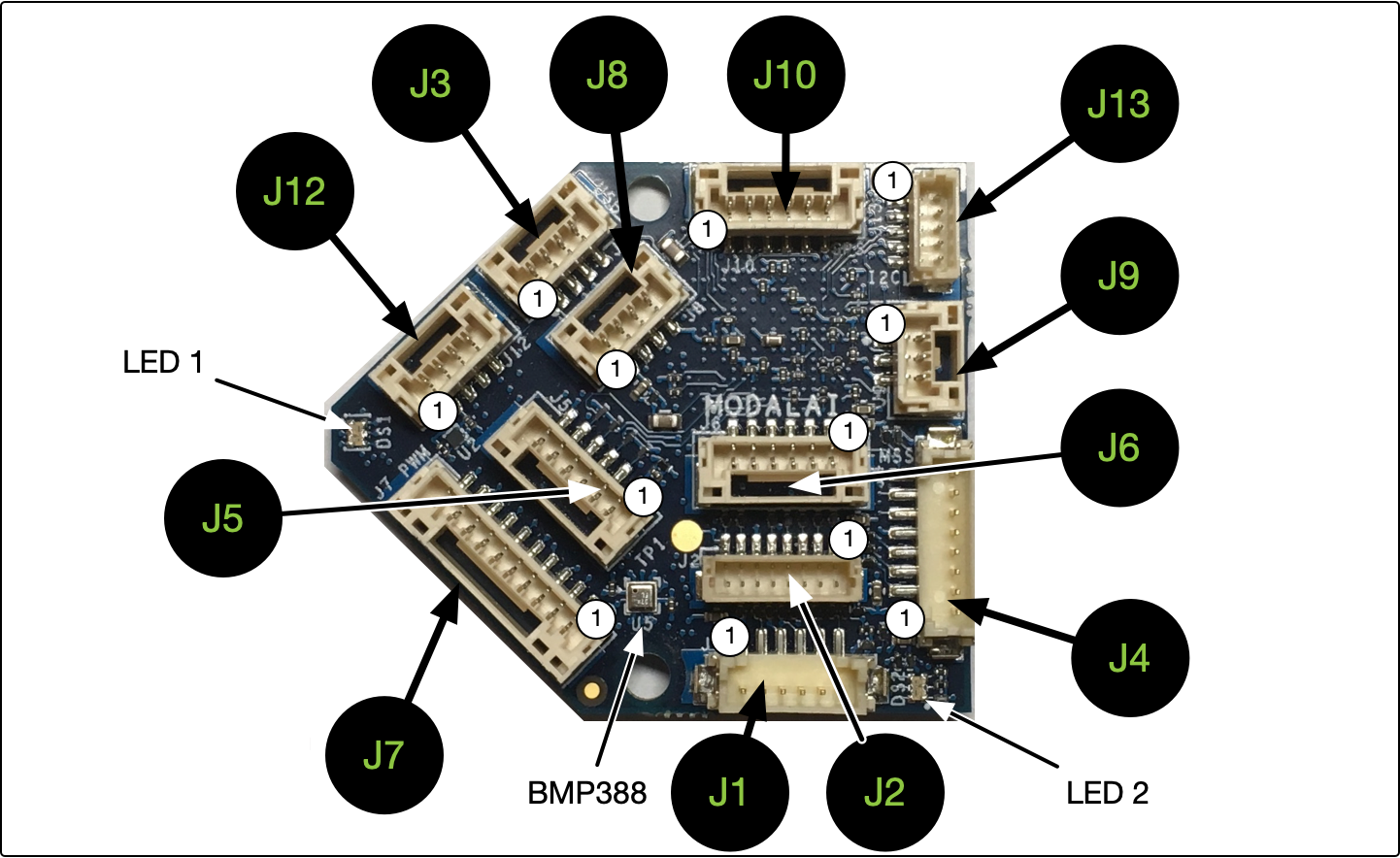
# 连接器
有关引脚布局的详细信息,请参见 这里 (打开新窗口).
| 连接器 | 摘要 |
|---|---|
| J1 | VOXL 通信接口连接器(TELEM2) |
| J2 | 编程和调试连接器 |
| J3 | USB 连接器 |
| J4 | uart2,uart esc(telem3) |
| J5 | 遥测连接器(TELEM1) |
| J6 | VOXL-电源管理输入/扩展 |
| J7 | 8 通道 PWM 输出连接器 |
| J8 | CAN 总线连接器 |
| J9 | PPM RC 输入 |
| J10 | 外部 GPS & 磁力计连接器 |
| J12 | RC 输入,Spektrum/SBus/UART 连接器 |
| J13 | I2C 显示器(备用传感器连接器)/安全按钮输入 |
# 用户指南
用户指南全文 这里 (打开新窗口).
# 如何建造
至 建造 PX4 为这一目标:
make modalai_fc-v1
# 串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | 调试控制台 (J2) |
| UART4 | /dev/ttyS3 | 扩展 UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2,主 VOXL 通信(J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | 不适用 |
# 支持
请访问 ModalAI 论坛 (打开新窗口) 了解更多信息。