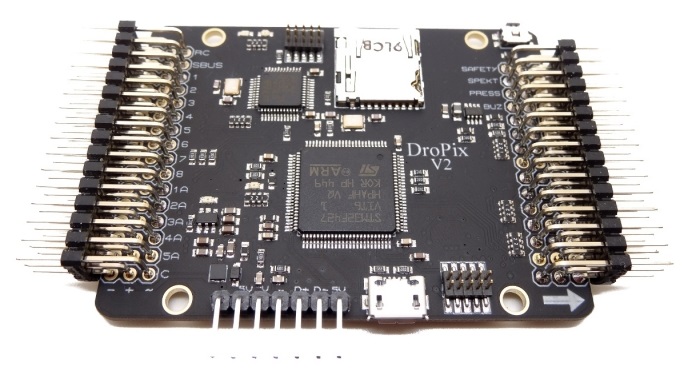
# DroPix 飞行控制器
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 (打开新窗口) 硬件支持或合规问题。
德罗特克® DroPix 自动驾驶仪 是基于 Pixhawk®-项目 (打开新窗口) FMUv2 开放式硬件设计。它可在以下设备上运行 PX4 Flight Stack NuttX (打开新窗口) 操作系统
DroPix 系统包括集成的多线程、类似 Unix/Linux 的编程环境、全新的自动驾驶功能(如任务和飞行行为的 Lua 脚本)以及定制的 PX4 驱动层,可确保所有进程的时间安排紧凑。
备注
该飞行控制器 支持的制造商.
# 主要功能
- 运行 NuttX 实时操作系统的先进 32 位 ARM Cortex® M4 处理器
- 14 个 PWM/伺服输出(8 个带故障安全和手动超控,5 个辅助,大功率兼容)
- 为附加外设(UART、I2C、CAN)提供丰富的连接选项
- 用于飞行中恢复和手动控制的集成备份系统,配有专用处理器和独立电源
- 备用系统集成了混合功能,提供一致的自动驾驶和手动覆盖混合模式
- 冗余电源输入和自动故障切换
- 外部安全按钮便于启动电机
- 多色 LED 指示灯
- 大功率多音压电音频指示器
- 用于长时间高速记录的 microSD 卡
- 传感器
- ST Micro L3GD20 3 轴 16 位陀螺仪
- ST Micro LSM303D 3 轴 14 位加速度计/磁力计
- Invensense® MPU 6000 3 轴加速度计/陀螺仪
- MEAS MS5611 气压计
- 标准 MK 型安装孔 45 毫米 x 45 毫米(M3 孔)
- 尺寸
- 大小:67506 毫米
- 重量:15 克(不含连接器)
# 购买地点
# 文件
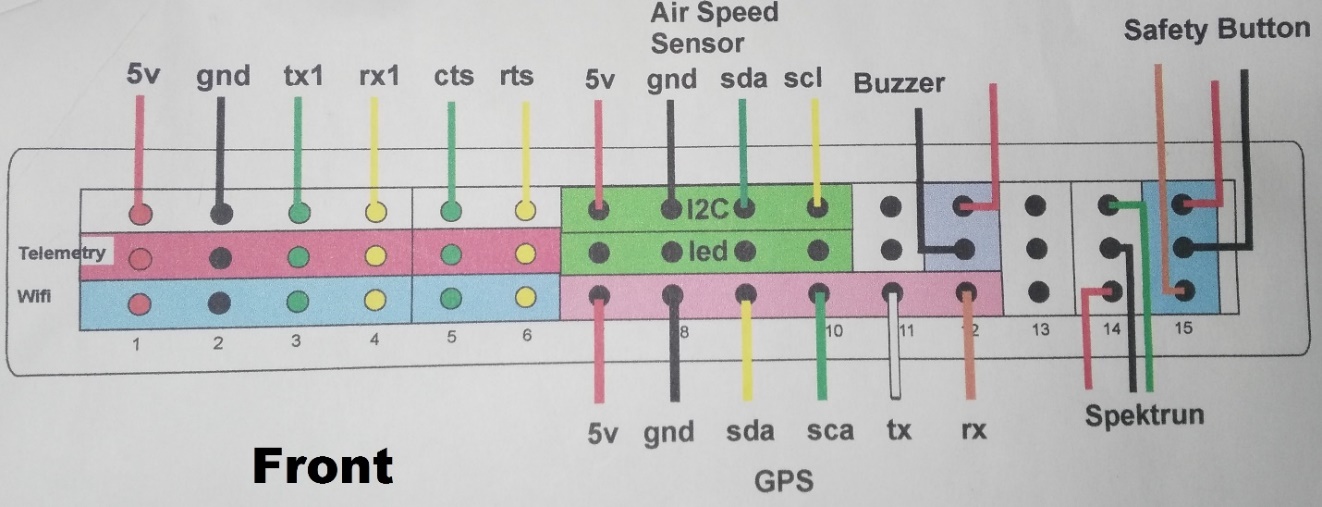
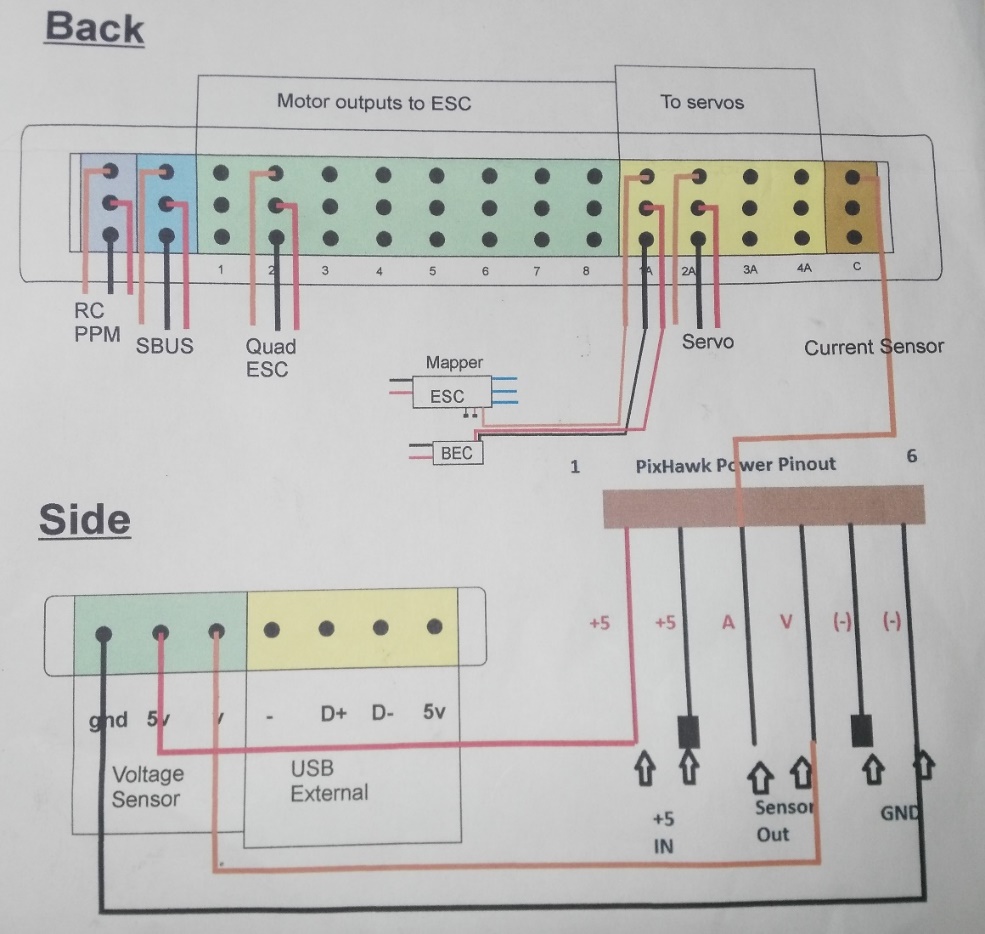
# 布线指南
下图显示了 Dropix 连接器的信息(更多信息请参见 drotek 文档 (打开新窗口)).
# 构建固件
TIP
大多数用户无需构建此固件!它已预置并由 QGroundControl 当连接了适当的硬件时。
至 建造 PX4 为这一目标:
make px4_fmu-v2_default
# 串行端口映射
| UART | 设备 | 港口 |
|---|---|---|
| UART1 | /dev/ttyS0 | IO 调试 |
| USART2 | /dev/ttyS1 | TELEM1(流量控制) |
| USART3 | /dev/ttyS2 | TELEM2(流量控制) |
| UART4 | ||
| UART7 | 控制台 | |
| UART8 | 序号4 |