# CUAV V5 nano 接线快速入门
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 (打开新窗口) 硬件支持或合规问题。
本快速入门指南介绍了如何为 CUAV V5 nano 飞行控制器,并连接其最重要的外围设备。
# 接线图概览
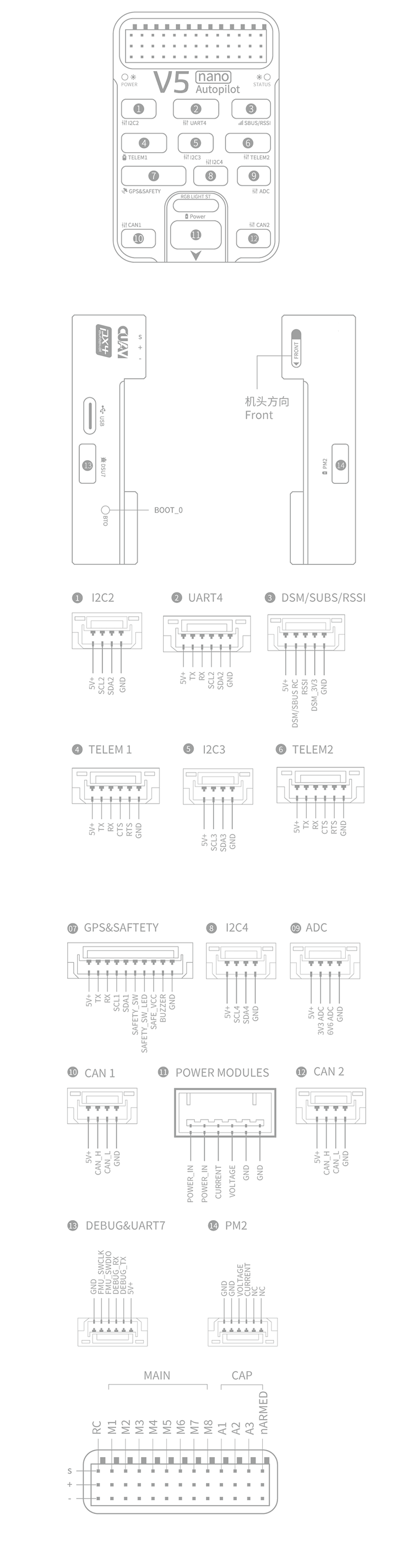
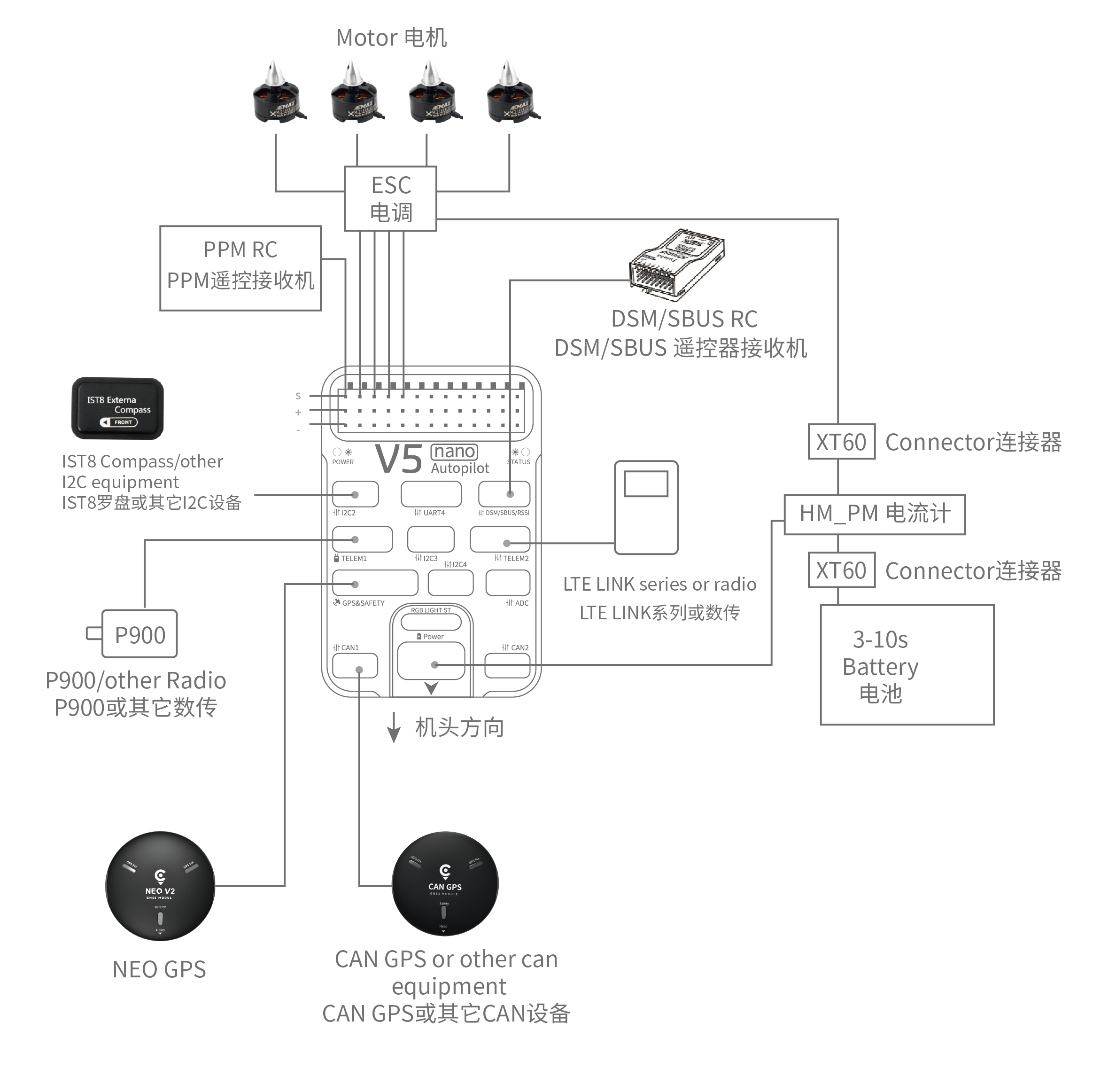
下图显示了如何连接最重要的传感器和外围设备(电机和伺服输出除外)。我们将在下面的章节中逐一详细介绍。
| 主界面 | 功能 |
|---|---|
| 电源 | 连接电源模块;提供电源以及模拟电压和电流测量。 |
| PM2 | 请勿与 PX4 一起使用 |
| TF 卡 | 用于存储日志的 SD 卡(随卡附送) |
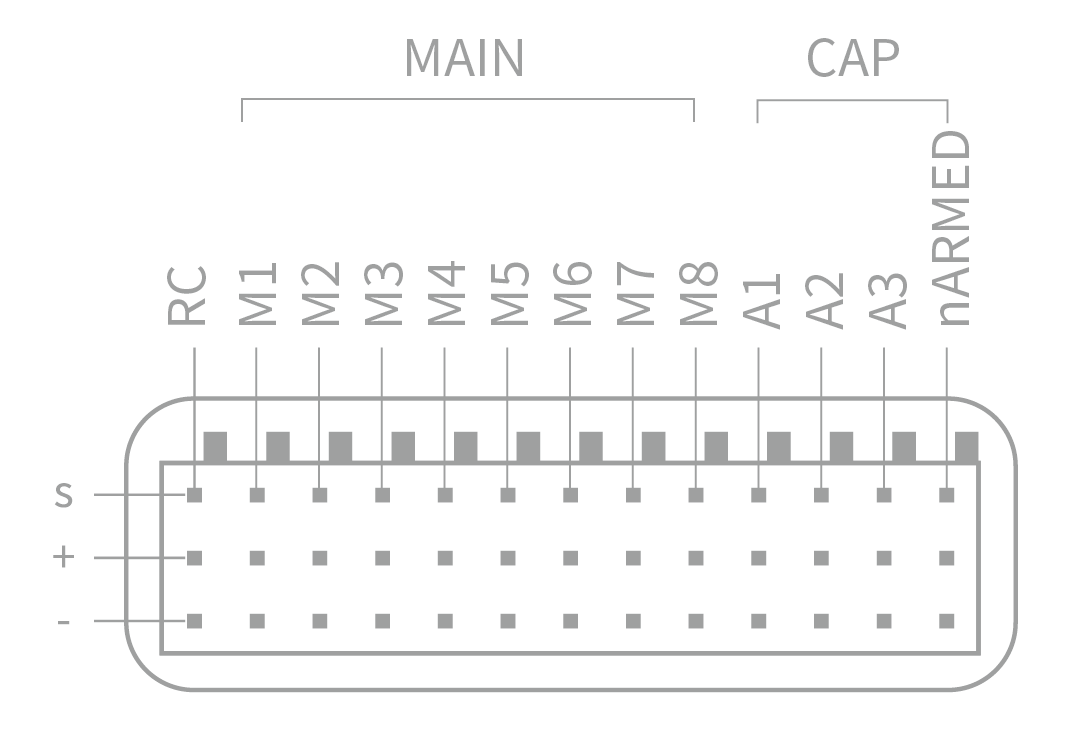
| M1~M8 | PWM 输出。可用于控制电机或伺服系统。 |
| A1~A3 | 捕捉引脚(非 目前 PX4 支持)。 |
| nARMED | 表示 FMU 已上膛状态。它为低电平有效(上膛时为低电平)。 |
| DSU7 | 用于 FMU 调试,读取调试信息。 |
| I2C2/I2C3/I2C4 | 连接 I2C 设备,如外部指南针。 |
| CAN1/CAN2 | 连接 UAVCAN 设备,如 CAN GPS。 |
| TYPE-C(USB) | 连接计算机,用于飞行控制器与计算机之间的通信,例如加载固件 |
| GPS&SAFETY | 连接至 Neo GPS,其中包括 GPS、安全开关和蜂鸣器接口。 |
| TELEM1/TELEM2 | 连接遥测系统。 |
| DSM/SBUS/RSSI | 包括 DSM、SBUS、RSSI 信号输入接口,DSM 接口可连接 DSM 卫星接收器,SBUS 接口可连接 SBUS 远程控制接收器,RSSI 为信号强度返回模块。 |
备注
如需了解更多接口信息,请阅读 V5 nano 手册 (打开新窗口).
备注
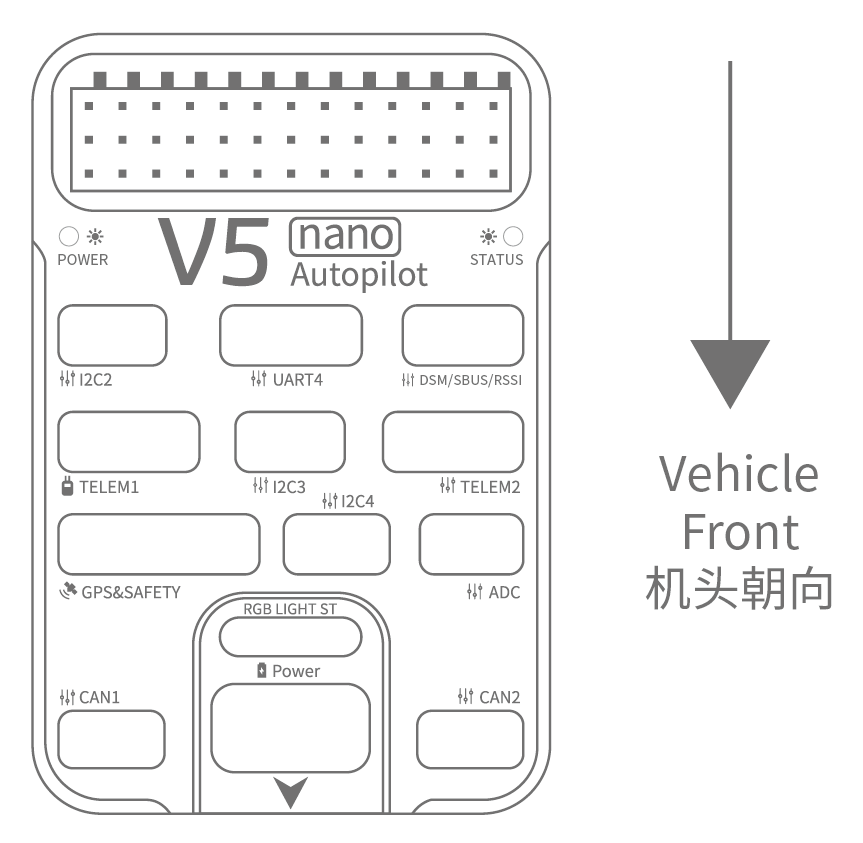
如果控制器无法按照推荐/默认方向安装(例如由于空间限制),则需要按照实际使用的方向配置自动驾驶仪软件: 飞行控制器定向.
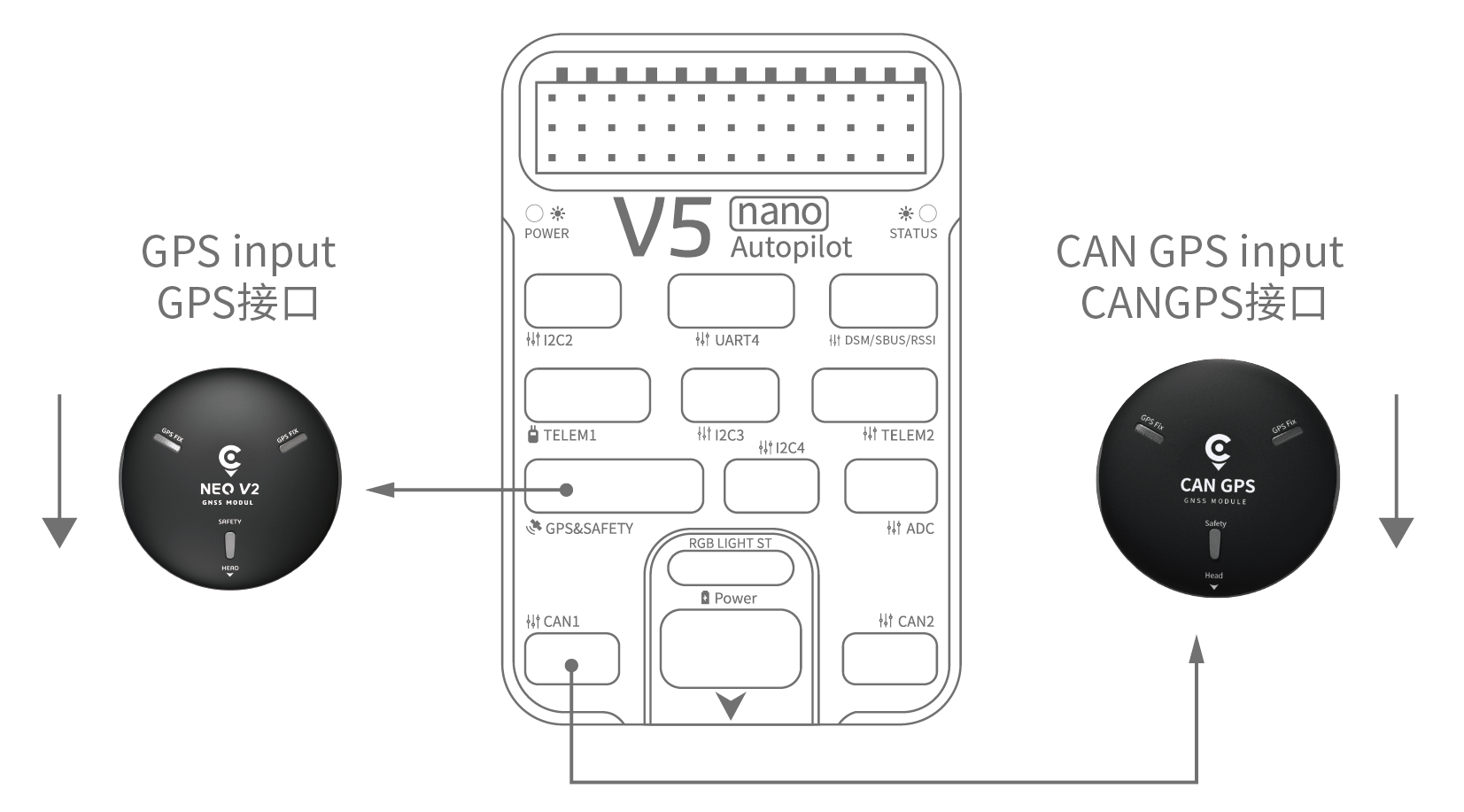
# GPS + 指南针 + 安全开关 + LED
推荐使用的 GPS 模块是 Neo v2 GPS其中包括 GPS、指南针、安全开关、蜂鸣器和 LED 状态指示灯。
备注
其他 GPS 模块可能无法使用(请参阅 这个兼容性问题).
GPS/Compass 模块应安装在机架上,尽可能远离其他电子设备,方向标朝向飞行器前方(Neo GPS 箭头与飞行控制箭头方向一致)。使用电缆连接到飞行控制 GPS 接口。
备注
如果使用 CAN GPS,请使用电缆连接到飞行控制 CAN 接口。
# 安全开关
只有在不使用推荐的安全开关时,才需要使用 V5+ 附带的专用安全开关。 Neo v2 GPS (内置安全开关)。
如果不使用 GPS 飞行,则必须将开关直接连接到 GPS1 如果您使用的是老式 6 针 GPS,请阅读底部接口的定义来更改线路)。
# 蜂鸣器
如果不使用推荐的 Neo v2 GPS 蜂鸣器可能会失灵。
# 无线电遥控
如果要手动控制飞行器,则需要遥控 (RC) 无线电系统(PX4 的自主飞行模式不需要无线电系统)。您需要选择一个兼容的发射机/接收机,然后将它们绑定以便进行通信(请阅读特定发射机/接收机附带的说明)。
下图显示了如何访问遥控接收器(请在套件中找到 S.Bus 电缆)
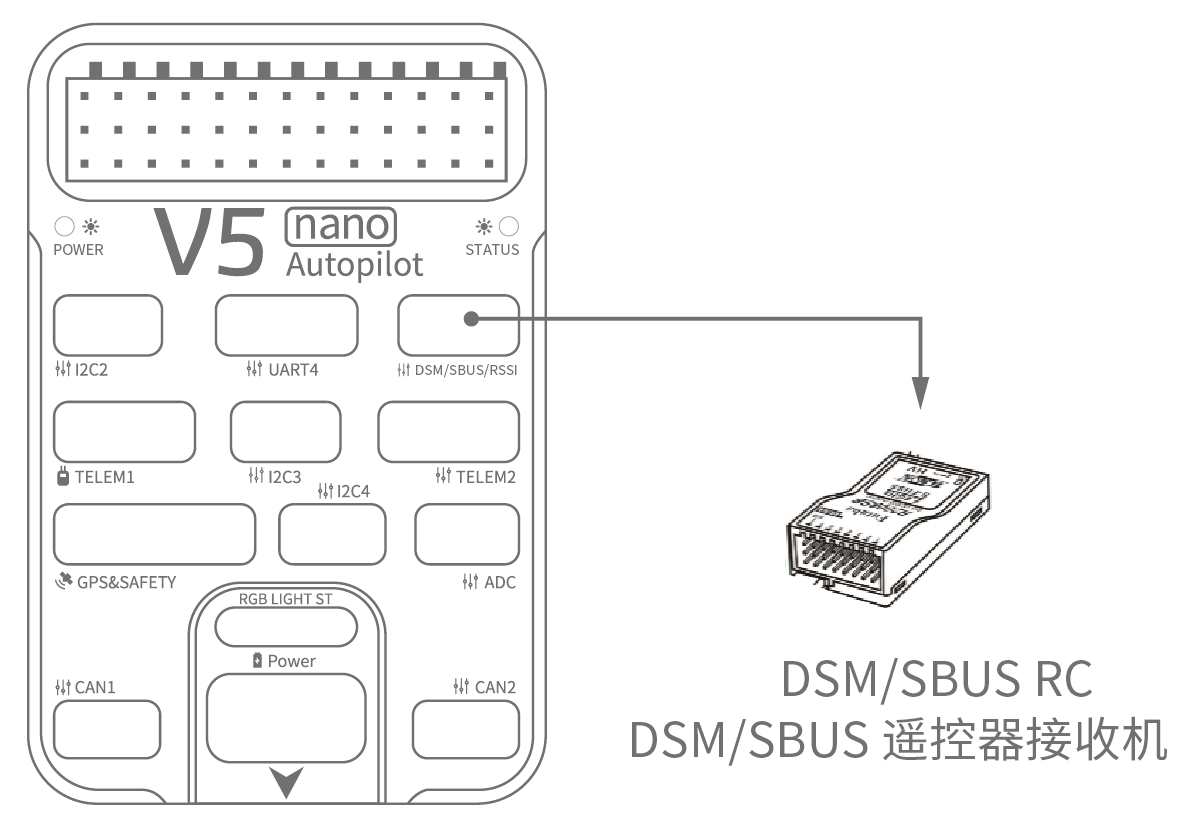
# Spektrum 卫星接收机
V5 nano 有一根专用的 DSM 电缆。如果使用 Spektrum 卫星接收器,则应将其连接至飞行控制器 DSM/SBUS/RSSI 接口。
# 电源
v5 nano 套件包括 HV_PM 模块,该模块支持 2~14S 锂电池。连接 HW_PM 飞行控制模块 电源 接口。
警告
提供的电源模块没有保险。电源 必须 在连接外围设备时应关闭。
备注
电源模块不是连接到 PWM 输出端的外围设备的电源。如果要连接舵机/执行器,则需要使用 BEC 单独为其供电。
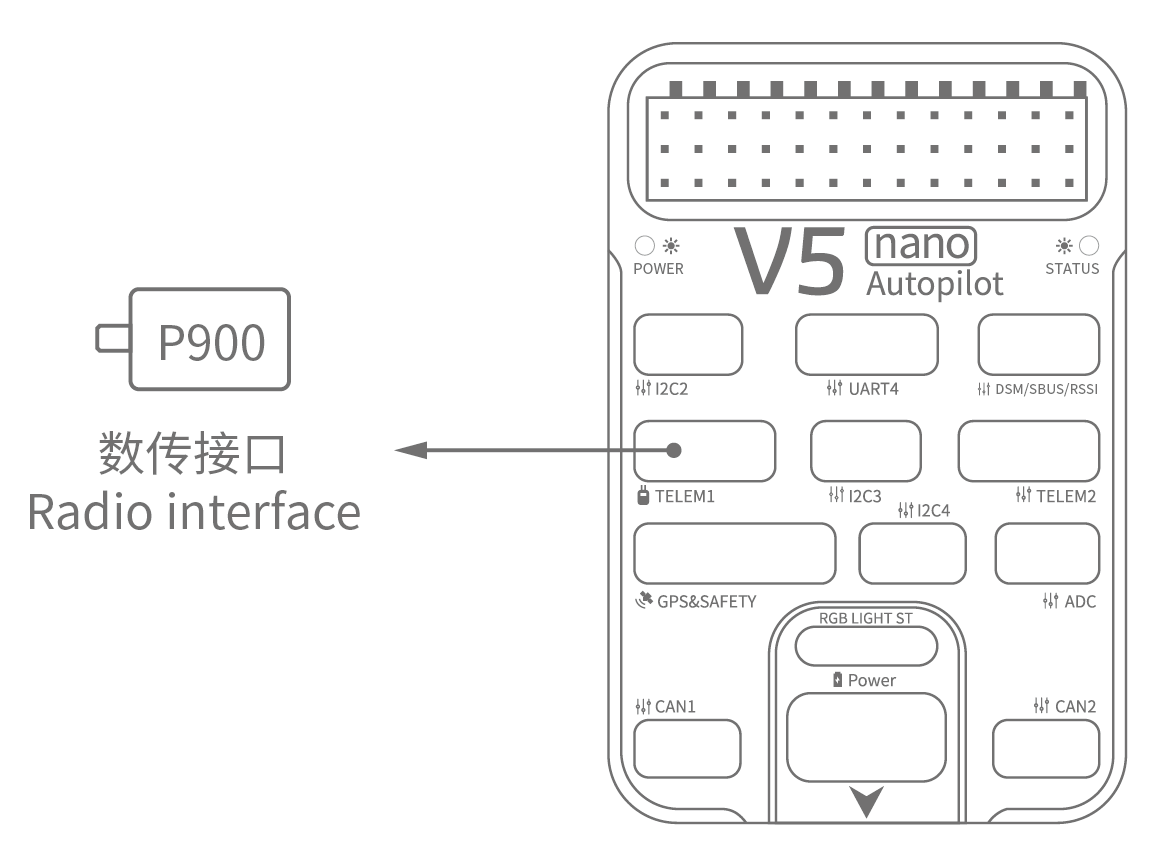
# 遥测系统(可选)
遥测系统可让您从地面站与飞行器进行通信、监视和控制飞行器(例如,您可以将无人驾驶飞行器引导至特定位置,或上传新任务)。
通信渠道通过遥测无线电进行。车载无线电应连接到 TELEM1 或 TELEM2 端口(如果连接到这些端口,则无需进一步配置)。另一个无线电与地面站电脑或移动设备连接(通常通过 USB)。
# SD 卡(可选)
一个 SD 卡 出厂时已插入(无需任何操作)。
# 发动机
电机 / 伺服器按照载具的指定顺序连接到 MAIN 端口。 机身参考.
# 引脚