# E-flite Convergence Tiltrotor VTOL (Pixfalcon)
E-Flite 融合 (打开新窗口) 用 PX4 可以很容易地改装成完全自主的 VTOL。虽然空间不大,但足以容纳一架 Pixfalcon 带 GPS 和遥测功能的飞行控制器。
# 购买地点
车架选项:
- WL Tech XK X450 - 阿里巴巴 (打开新窗口)
- JJRC M02 - Banggood (AU) (打开新窗口), 阿里巴巴 (打开新窗口)
飞行控制器选项():
- Pixhawk 4 Mini
- Holybro Pixhawk Mini.
- 任何其他外形足够小巧的兼容飞行控制器。
# 硬件设置
载具的电机和控制面需要 7 个 PWM 信号:
- 电机(左/右/后)
- 倾斜伺服器(右/左)
- 升降器(左/右)
您可以根据自己的需要,将它们或多或少地连接到飞行控制器的输出端(但电机的输出端应组合在一起,以此类推)。
输出配置在 执行机构配置 请按照 VTOL 倾转旋翼机几何形状和输出配置的说明进行操作。请注意,您需要从 通用倾转旋翼机 VTOL 镜框
请注意,配置屏幕中的左和右以及框架参照都是从真实飞机内的人类驾驶仪视角(或从上往下看,如下图所示)定义的:

# 飞行控制器
飞行控制器可以安装在原来自动驾驶仪的位置。
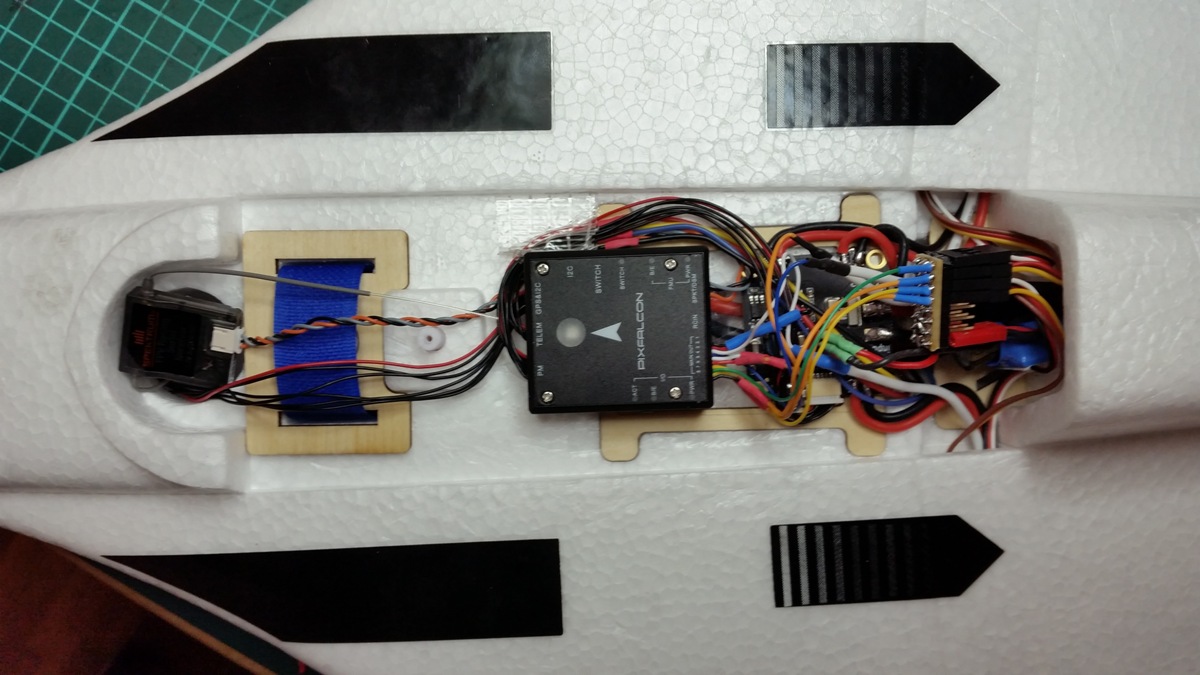
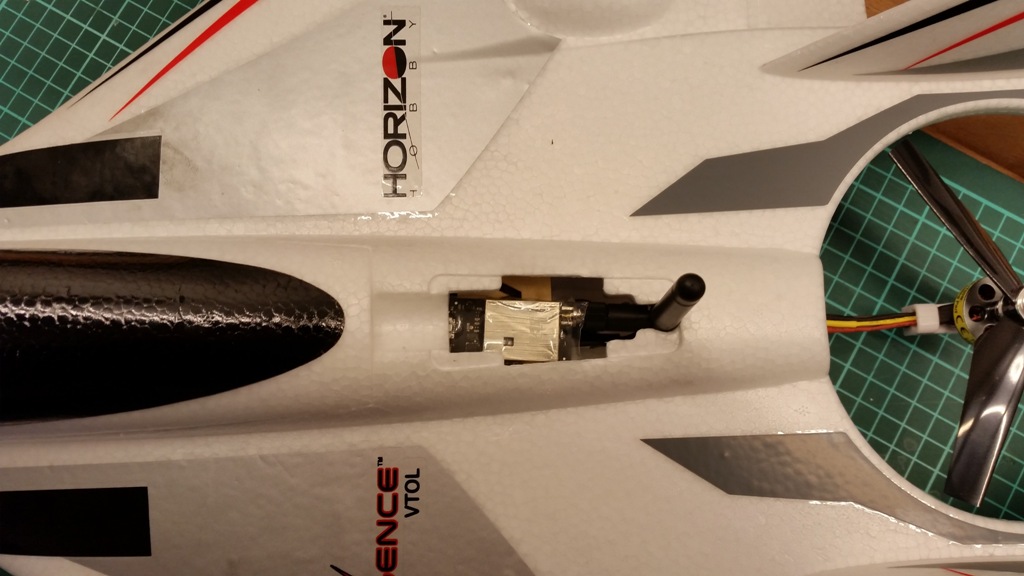
# 遥测无线电
遥测模块安装在用于放置 FPV 传动装置的托架中。
# 全球定位系统
为了安装 GPS,我们在驾驶舱内挖出了一段泡沫塑料。这样,GPS 就可以放在车身内部,并被很好地收纳起来,而不会影响载具的外观。

# PX4 配置
按照 标准配置 于 QGroundControl (无线电、传感器、飞行模式等)。
与这辆车相关的特定设置有
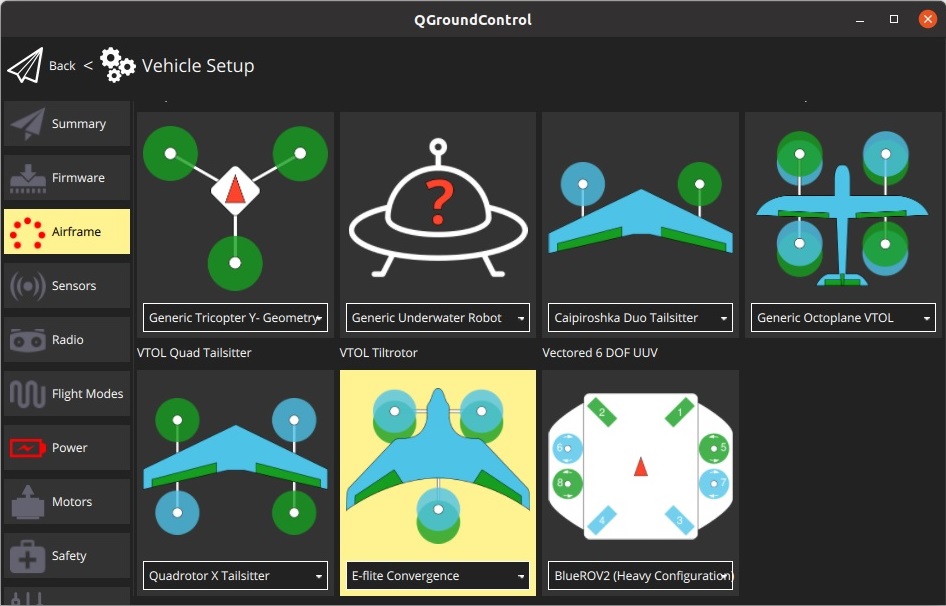
- 机身
- 选择机身配置 E-flite Convergence 根据 VTOL 倾转旋翼机 并重新启动 QGroundControl.
- 选择机身配置 E-flite Convergence 根据 VTOL 倾转旋翼机 并重新启动 QGroundControl.
- 飞行模式/开关
- 由于这是一款 VTOL 飞行器,您必须 指定 RC 控制器开关 用于在多旋翼和固定翼模式之间转换。