# ThunderFly TFRPM01 转速计数器
TFRPM01 (打开新窗口) 转速计是一种体积小、系统要求低的转速计数器。
电路板本身并不包括实际的传感器,但可与许多不同的传感器/探头类型一起使用,用于转数计数。它有一个用于连接 PX4 的 I²C 连接器,并通过一个 3 针连接器与实际传感器相连。它还有一个 LED,可提供基本诊断信息。

备注
TFRPM01 传感器是一种开源硬件,可从以下网站购买 ThunderFly s.r.o. (打开新窗口) (制造数据为 可在 GitHub 上获取 (打开新窗口)).
# 硬件设置
电路板配备了用于连接 PX4 的(两个直通)I²C 连接器和一个可用于连接各种传感器的 3 针连接器:
- TFRPM01 可以连接到任何 I²C 端口。
- TFRPM01 有一个 3 针针头连接器(配备上拉输入),可连接不同类型的探头。
- 传感器/探头硬件需要一个脉冲信号。信号输入可接受 +5V TTL 逻辑信号或 开路集电极 (打开新窗口) 输出。最大脉冲频率为 20 kHz,占空比为 50%。
- 探头连接器提供来自 I²C 总线的 +5V 电源,可使用的最大功率受 RC 滤波器限制(详见原理图)。
TFRPM01A 电子设备配有 LED 信号灯,可用于检查探头是否连接正确。当脉冲输入接地或显示为逻辑 0 时,LED 亮起,因此只需手动旋转转子即可检查探头是否正常工作。
# 霍尔效应传感器探头
霍尔效应传感器(磁力操作)适用于恶劣的环境,在这种环境下,污垢、灰尘和水都可能接触到感应转子。
市场上有许多不同的霍尔效应传感器。例如 5100 微型法兰安装接近传感器 (打开新窗口) 是个不错的选择。

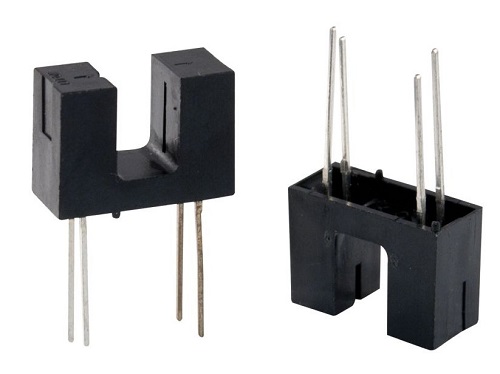
# 光学传感器探头
也可以使用光学传感器(根据测量要求,光学传感器可能更适合)。透射式和反射式传感器都可用于脉冲发生。
# 软件设置
# 启动驱动器
驱动程序不会自动启动(在任何机身中)。您需要手动启动它,可以使用 QGroundControl MAVLink 控制台 (打开新窗口) 或将驱动程序添加到 启动脚本 在 SD 卡上。
# 从控制台启动驱动程序
从 游戏机 (打开新窗口) 使用该命令:
pcf8583 start -X -b <总线编号>;
在哪里?
-X表示这是一条外部总线。<巴士编号>;是设备连接的总线编号
备注
代码中的总线编号 -b<总线编号>; 可能与自动驾驶仪上的总线标签不一致。例如,在使用 CUAV V5+ 或 CUAV Nano 时:
| 自动驾驶仪标签 | -b 数量 |
|---|---|
| I2C1 | -X -b 4 |
| I2C2 | -X -b 2 |
| I2C3 | -X -b 1 |
pcf8583 启动 命令为每个总线编号输出相应的自动驾驶仪总线名称/标记。
# 测试
您可以通过以下几种方法验证计数器是否正常工作
# PX4 (NuttX) MAVLink 控制台
QGroundControl MAVLink 控制台 (打开新窗口) 也可用于检查驱动程序是否正在运行,以及它正在输出的 UORB 主题。
要检查 TFRPM01 驱动程序的状态,请运行以下命令:
pcf8583 状态
如果驱动程序正在运行,则将打印 I²C 端口以及运行实例的其他基本参数。如果驱动程序未运行,则可使用上述程序启动驱动程序。
听众 命令可以监控运行中驱动程序的 RPM UORB 消息。
听众转速
对于定期显示,您可以添加 -n 50 参数,打印接下来的 50 条信息。
# QGroundControl MAVLink 检查器
QGroundControl Mavlink 检查员 (打开新窗口) 可用于观察来自 PX4 的 MAVLink 信息,包括 RAW_RPM (打开新窗口) 由驾驶员发出:
- 从 QGC 菜单启动检查器: 分析工具 > Mavlink 检查器
- 检查
RAW_RPM如果没有,请检查驱动程序是否正在运行)。
# 参数设置
通常情况下,传感器无需配置即可使用,但转速值应与实际转速的倍数相对应。这是因为 PCF8583_MAGNET 参数必须与传感转子每转一圈的实际脉冲数一致。如有必要,应调整以下参数:
- PCF8583_POOL - 读出计数的集合间隔时间
- PCF8583_RESET - 计数器的数值,计数后的数字应重置为零。
- PCF8583_MAGNET - 每转一圈的脉冲数,例如转子盘上的磁铁数。
备注
重新启动驱动程序/PX4 后,上述参数将出现在 QGC 中。
如果重启后配置参数不可用,则应检查驱动程序是否已启动。可能是 固件中没有驱动程序在这种情况下,必须将其添加到电路板配置中:
驱动程序/rpm/pcf8583