# 固定翼飞机修剪指南
微调用于校准微调条件下的控制面(相对空速、空气密度、攻角、飞机构型等)。在微调条件下,经过适当微调的飞机将保持其姿态,而无需驾驶仪或稳定计算机输入任何控制信息。
通用航空飞机、商用飞机和大型无人驾驶飞机通过以下方式调节控制面 微调片 (打开新窗口) 而小型无人机只需在控制面的致动器上增加一个偏移量即可。
基本修剪 部分解释了每个微调参数的用途以及如何找到正确的值。参数 高级修剪 该部分介绍了可根据测量的空速和襟翼位置自动调整微调的参数。
# 基本修剪
操作员可能需要使用几个参数来正确调整固定翼飞机。这些参数及其用例概述如下:
- RCx_TRIM 对从遥控发射机接收到的信号进行微调。这些参数会在 RC 校准.
- PWM_MAIN_TRIMx 在混合后将微调应用于 PWM 通道。这些用于在飞行前将控制面调整到默认角度。
- FW_PSP_OFF 对俯仰设定点进行偏移。这用于设置飞机以巡航速度飞行时所需的攻角。
- FW_AIRSPD_TRIM 用于速率控制器,根据测量的空速缩放输出。参见 空速缩放 了解更多详情。
- TRIM_ROLL, TRIM_PITCH 和 TRIM_YAW 对控制信号进行微调 之前 混合。例如,如果升降舵有两个舵机、
TRIM_PITCH对两个控制面进行微调。当控制面已经对齐,但飞机在手动(非稳定)飞行时上下左右摇摆/滚动/偏航,或者在稳定飞行时控制信号有持续偏移时,就需要使用这些功能。
设置上述参数的正确顺序是
- 如果可能,通过实际调整连杆长度来调整舵机,并通过调整 PWM 通道进行微调(使用
PWM_MAIN/AUX_TRIMx)放在工作台上,以便将控制面正确设置到理论位置。 - 在稳定模式下以巡航速度飞行,并设置螺距设定点偏移 (
FW_PSP_OFF)到所需的攻角。巡航速度下所需的攻角相当于飞机在翼平飞行时保持恒定高度所需的俯仰角。如果使用空速传感器,还需设置正确的巡航空速 (FW_AIRSPD_TRIM). - 查看日志文件中的执行器控制(上传到 飞行回顾 (打开新窗口) 并检查 执行器控制器 例如),并设置螺距微调 (
TRIM_PITCH).将该值设为翼平飞行时俯仰信号的平均偏移量。
如果您不想查看飞行日志,或者您觉得在手动模式下飞行舒适,则可以在步骤 2 之前执行步骤 3。然后,您可以(使用微调开关)对遥控器进行微调,并将数值报告给 TRIM_PITCH (并移除发射机上的微调器)或更新 TRIM_PITCH 在飞行过程中直接通过遥测和 QGC 进行测量。
# 高级修剪
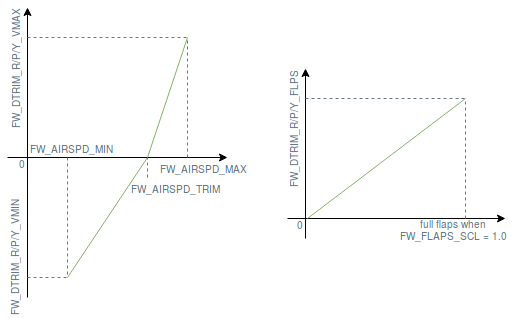
鉴于不对称翼面引起的俯仰力矩随空速增加,当襟翼展开时,飞机需要根据当前测量的空速和襟翼位置进行重新修整。为此,可使用以下参数定义一条与空速相关的双线性曲线(见下图)和一条与襟翼状态相关的俯仰修整增量函数:
- fw_dtrim_[r/p/y]_[vmin/vmax] [vmin/vmax 的滚动/螺距/偏航微调值。
微调滚动/俯仰/偏航在最小/最大空速下(定义为 FW_AIRSPD_MIN 和 FW_AIRSPD_MAX). - fw_dtrim_p_flps 和 fw_dtrim_p_flps 是添加到
微调滚动/俯仰/偏航当襟翼展开时。
完全对称的机身只需要螺距微调增量,但由于实际机身永远不会完全对称,因此有时也需要滚转和偏航微调增量。
备注
如果襟翼使用了不同于 1.0 的比例系数(参数 FW_FLAPS_SCL),由 fw_dtrim_r/p_flps也按相同系数缩放。
← 固定翼飞机高级调整指南 四平面配置 →