# E-flite Convergence Tiltrotor VTOL (Pixfalcon)
E-Flite 融合 (打开新窗口) 用 PX4 可以很容易地改装成完全自主的 VTOL。虽然空间不大,但足以容纳一架 Pixfalcon 带 GPS 和遥测功能的飞行控制器。
备注
原版 地平线爱好 E-Flite 融合 (打开新窗口) 框架和 Pixfalcon 已停止使用。替代方案见 购买 节。
# 购买
车架选项:
- WL Tech XK X450 - Banggood (打开新窗口), 阿里巴巴 (打开新窗口)
- JJRC M02 - Banggood (AU) (打开新窗口), 阿里巴巴 (打开新窗口)
飞行控制器选项():
- Pixhawk 4 Mini
- Holybro Pixhawk Mini.
- 任何其他外形足够小巧的兼容飞行控制器。
# 硬件设置
飞行器需要 7 个 PWM 信号,这些信号必须按照下列规定连接到飞行控制器的输出端 机身参考 > VTOL 倾转旋翼机 > E-flite Convergence.现将该地图复制如下。
| 港口 | 连接 |
|---|---|
| MAIN 1 | 电机右侧 |
| MAIN 2 | 左侧电机 |
| MAIN 3 | 电机后部 |
| MAIN 4 | 空的 |
| MAIN 5 | 右倾伺服器 |
| MAIN 6 | 左倾斜伺服器 |
| MAIN 7 | 右侧电梯 |
| MAIN 8 | 左侧 |
请注意,参考文献中的左和右是从真实飞机内人类驾驶仪的视角定义的(或从上往下看,如下图所示):

# 飞行控制器
飞行控制器可以安装在原来自动驾驶仪的位置。
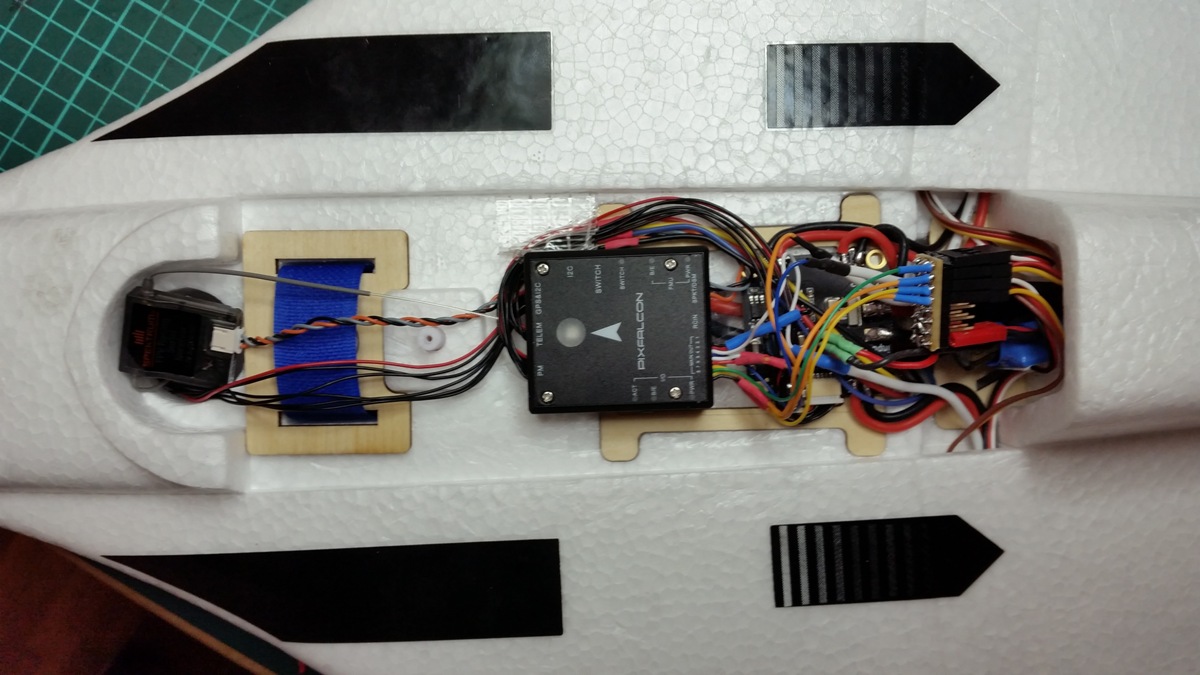
# 遥测无线电
遥测模块安装在用于放置 FPV 传动装置的托架中。
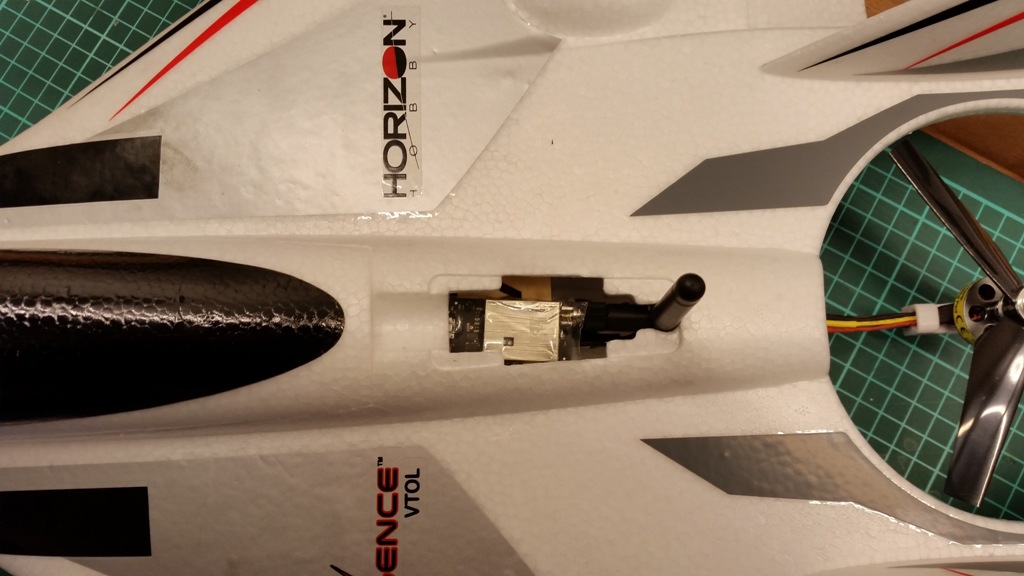
# 全球定位系统
为了安装 GPS,我们在驾驶舱内挖出了一段泡沫塑料。这样,GPS 就可以放在车身内部,并被很好地收纳起来,而不会影响载具的外观。

# PX4 配置
按照 标准配置 于 QGroundControl (无线电、传感器、飞行模式等)。
与这辆车相关的特定设置有
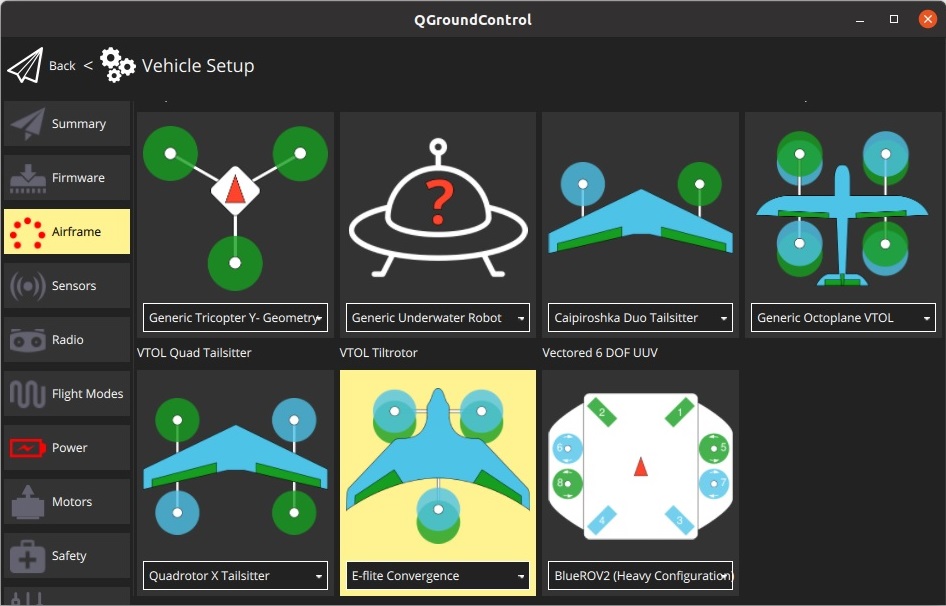
- 机身
- 选择机身配置 E-flite Convergence 根据 VTOL 倾转旋翼机 并重新启动 QGroundControl.
- 选择机身配置 E-flite Convergence 根据 VTOL 倾转旋翼机 并重新启动 QGroundControl.
- 飞行模式/开关
- 由于这是一款 VTOL 飞行器,您必须 指定 RC 控制器开关 用于在多旋翼和固定翼模式之间转换。