# 仿真场景Gazebo载具
本主题列出/显示 PX4 支持的载具 仿真场景Gazebo 模拟和 生产 运行这些命令所需的命令(这些命令通过终端在 PX4-自动驾驶仪 目录)。
支持的飞行器类型包括:多旋翼飞行器、VTOL、VTOL 尾翼飞行器、飞机、UGV无人车、潜艇/UUV。
TIP
有关构建目标的完整列表,请运行 make px4_sitl list_vmd_make_targets (并过滤以 仿真场景Gazebo_).
备注
仿真场景Gazebo 页面介绍了如何安装 Gazebo、如何启用视频和加载自定义地图以及许多其他配置选项。
# 多旋翼飞行器
# 四旋翼(默认)
生产 px4_sitl 仿真场景Gazebo
# 带有光流的四旋翼飞行器
生产 px4_sitl gazebo_iris_opt_flow
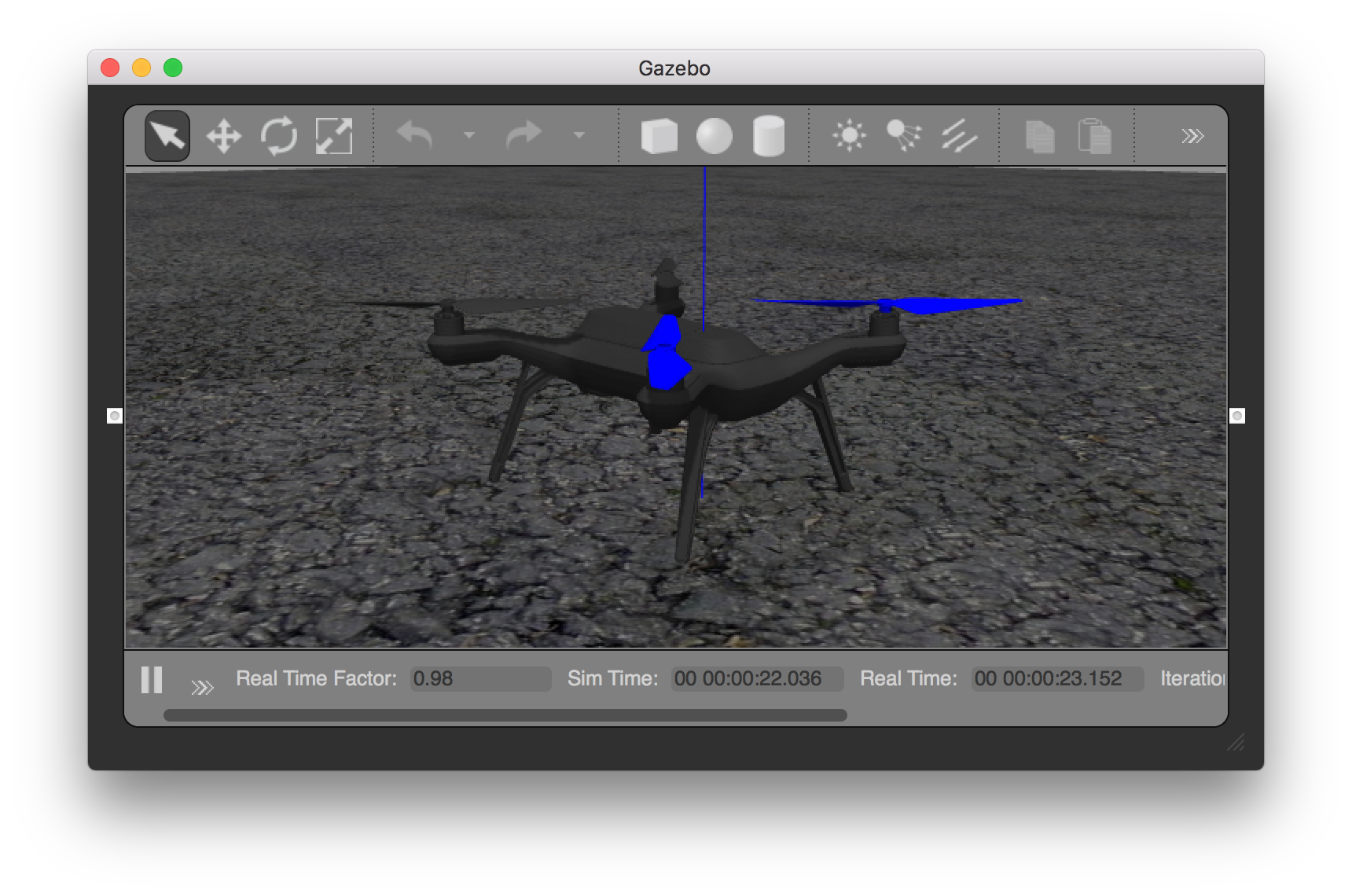
# 3DR Solo(四旋翼飞行器)
生产 PX4_SITL 仿真场景Gazebo_SOLO
# 台风 H480(六旋翼)
make px4_sitl gazebo_typhoon_h480
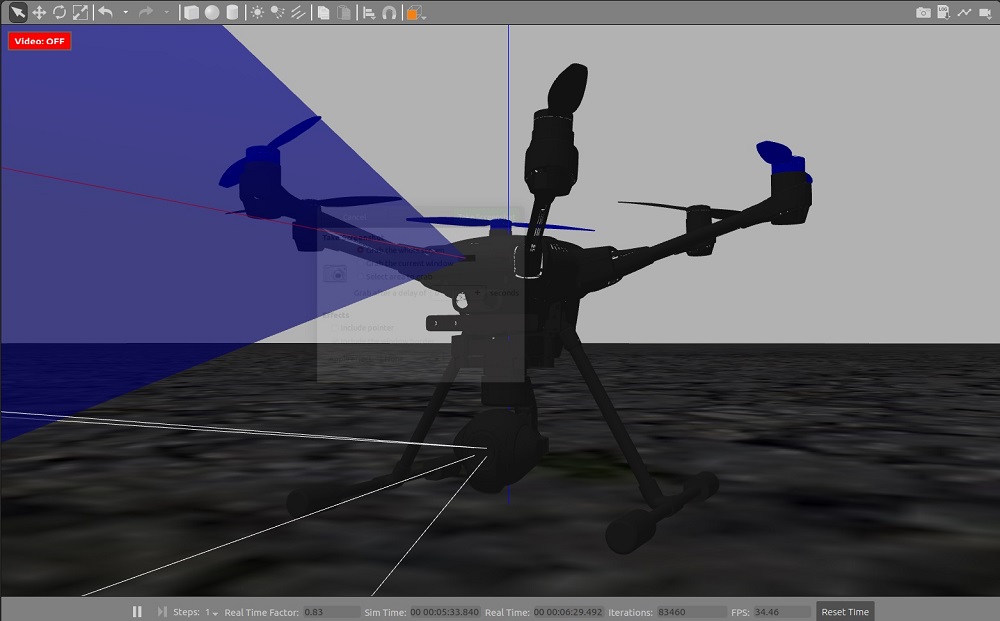
备注
该目标还支持 视频流模拟.
# 飞机/固定翼
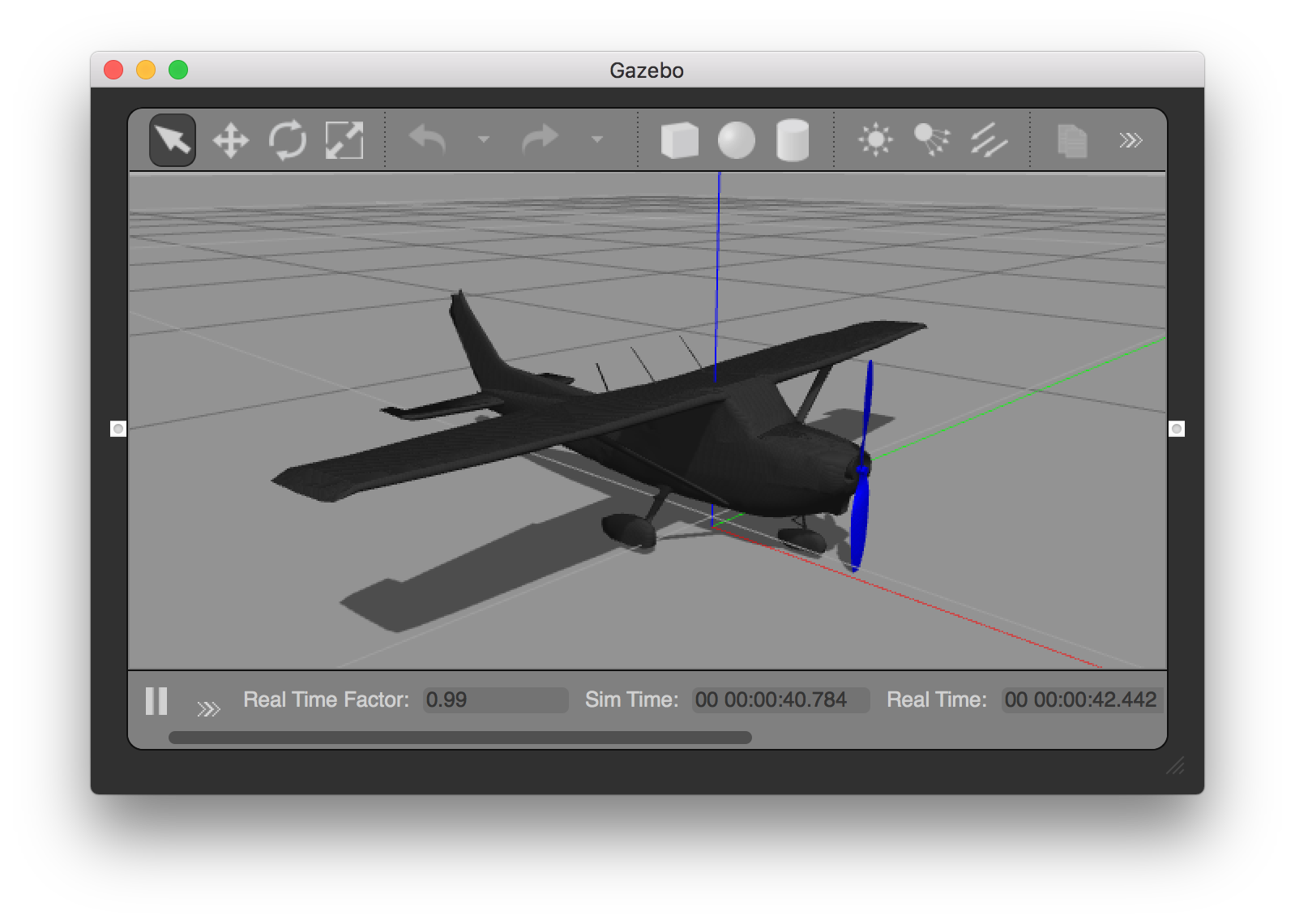
# 标准平面
生产 px4_sitl 仿真场景Gazebo_飞机
# 带弹射器发射的标准飞机
生产 px4_sitl 仿真场景Gazebo_平面_弹弓
该模型模拟手动/弹射器发射,可用于 固定翼起飞 在定位模式、起飞模式或任务中。
一旦载具启动,飞机就会自动起飞。
# VTOL
# 标准 VTOL
生产 px4_sitl gazebo_standard_vtol
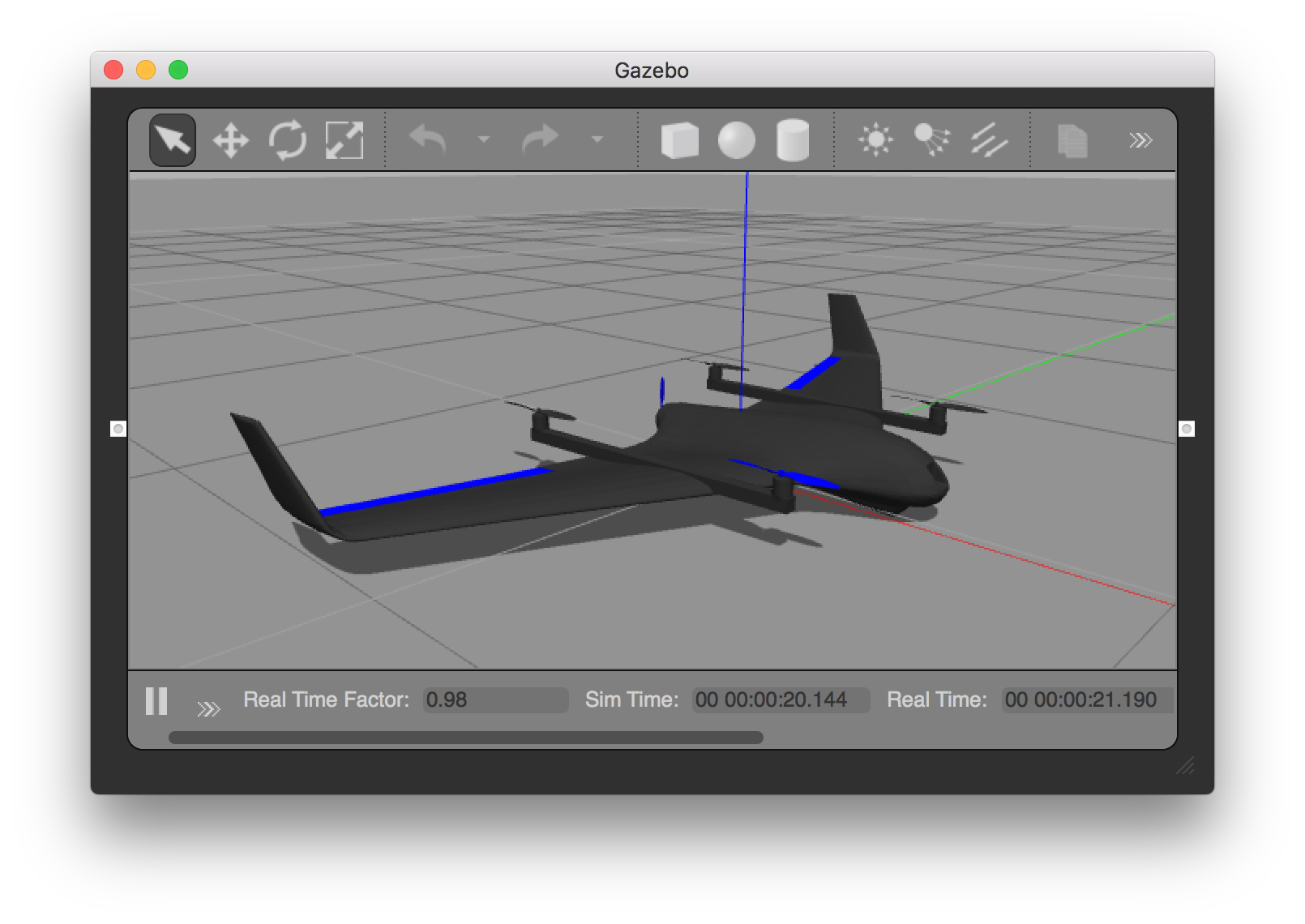
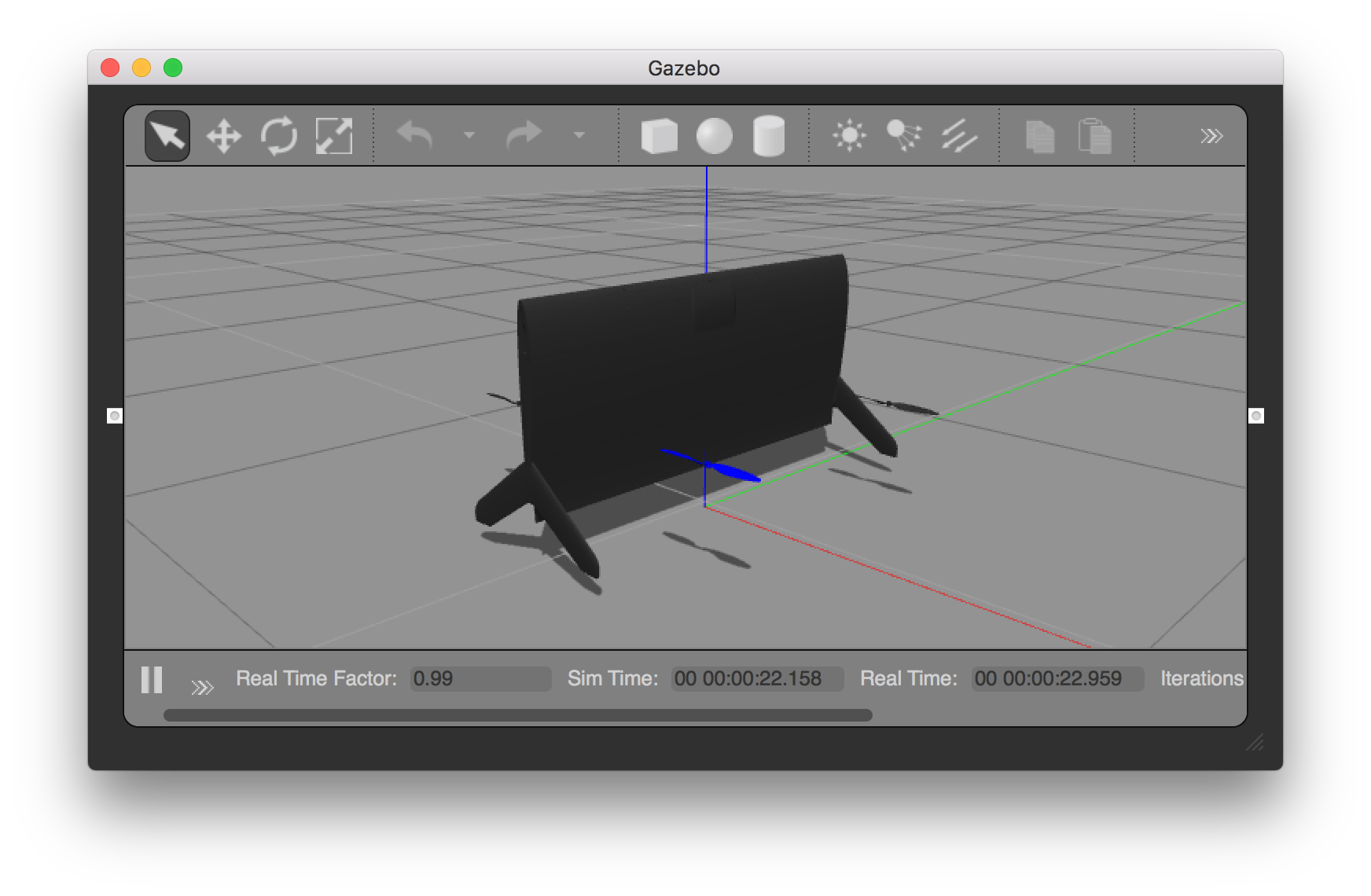
# 尾随者 VTOL
生产 px4_sitl 仿真场景Gazebo_尾随者
# 无人地面运载工具(UGV/漫游车/汽车)
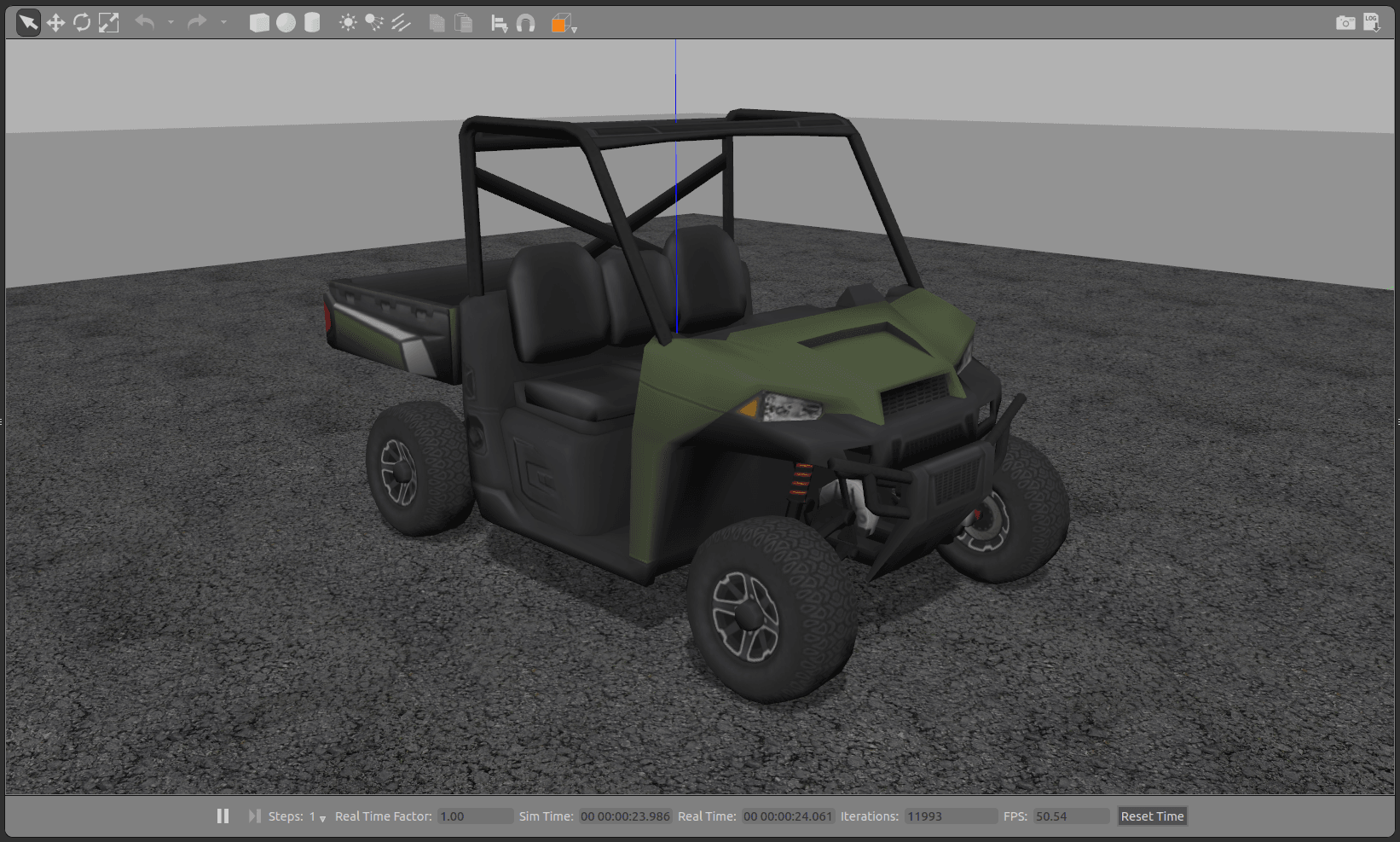
# 阿克曼 UGV
生产 px4_sitl 仿真场景Gazebo_rover
# 差分 UGV
生产 px4_sitl gazebo_r1_rover
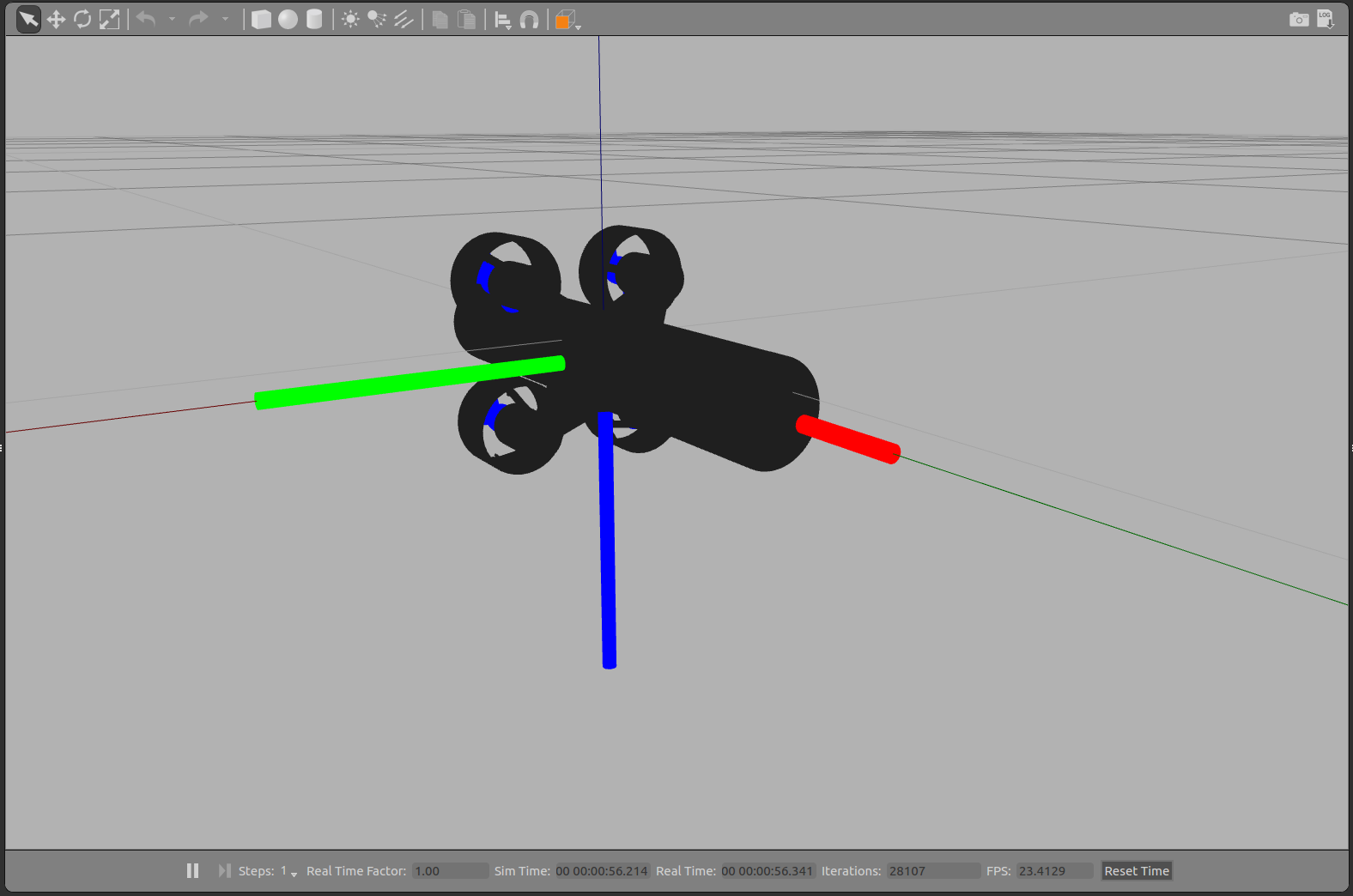
# 无人潜航器(UUV/潜艇)
# 河马校园 TUHH UUV
生产 PX4_SITL 仿真场景Gazebo_UUV_海波校区
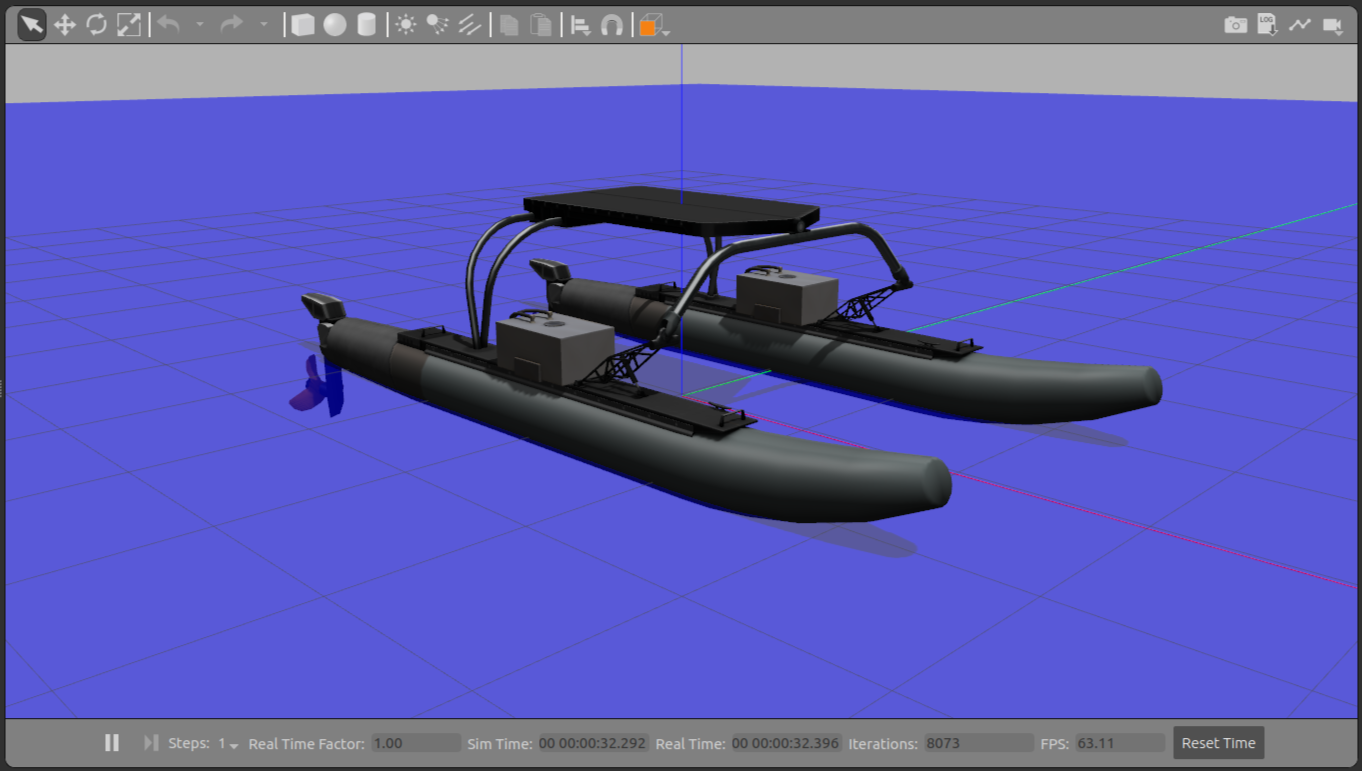
# 无人水面飞行器(USV/船)
# 船
生产 px4_sitl 仿真场景Gazebo_船
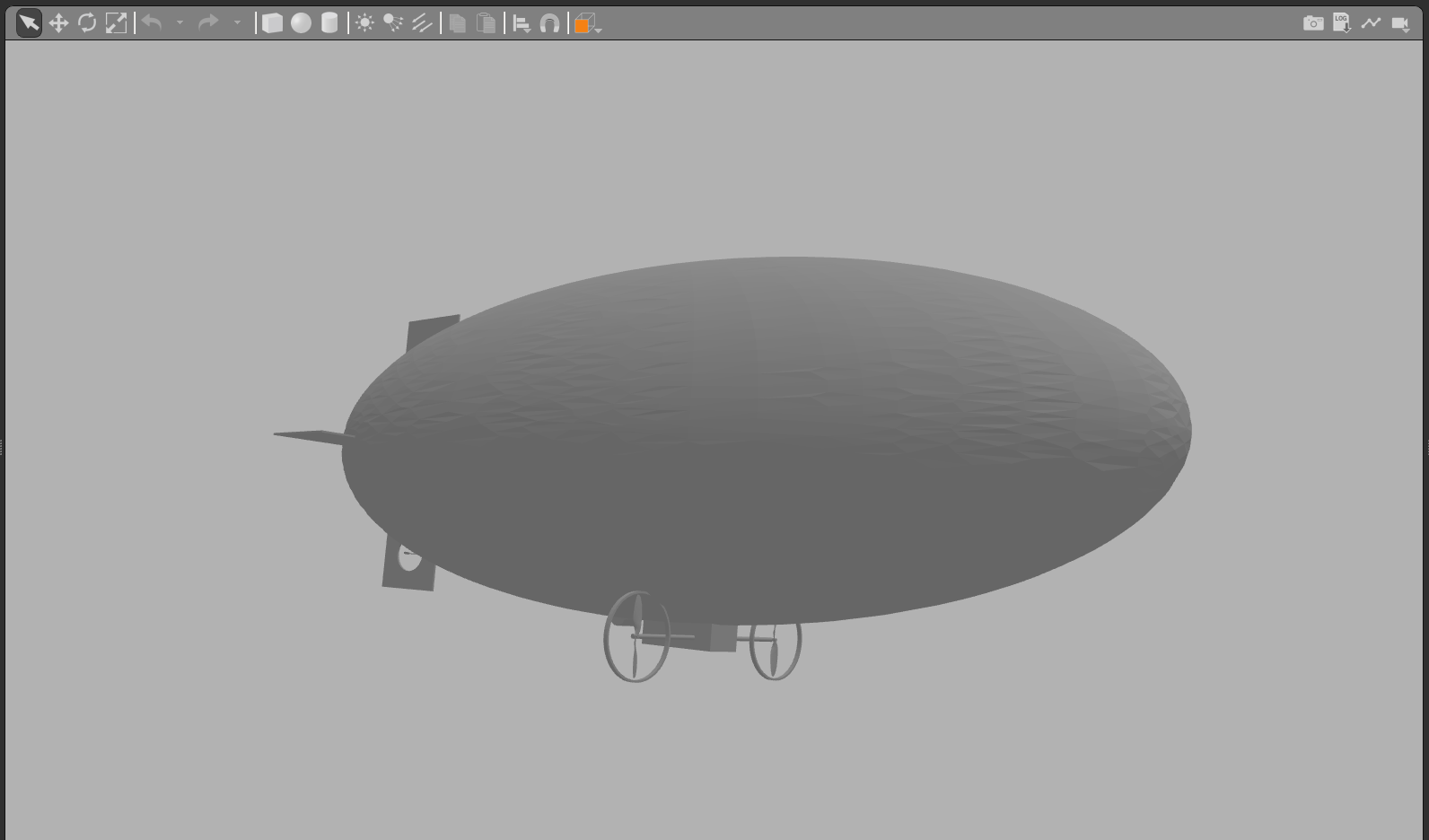
# 飞艇
# 云船
生产 px4_sitl 仿真场景Gazebo_云船