# 仿真场景Gazebo世界
本专题提供有关以下方面的图像/信息 仿真场景Gazebo PX4 支持的世界。
空.世界 默认情况下会生成,但可以通过一个 特定模型世界.开发人员还可以手动指定要加载的世界: 仿真场景Gazebo模拟 > 加载特定世界.
支持的世界的源代码可在 GitHub 上找到: PX4/sitl_gazebo/worlds (打开新窗口).
# 空(默认)
PX4/sitl_gazebo/worlds/empty.world (打开新窗口)
![]()
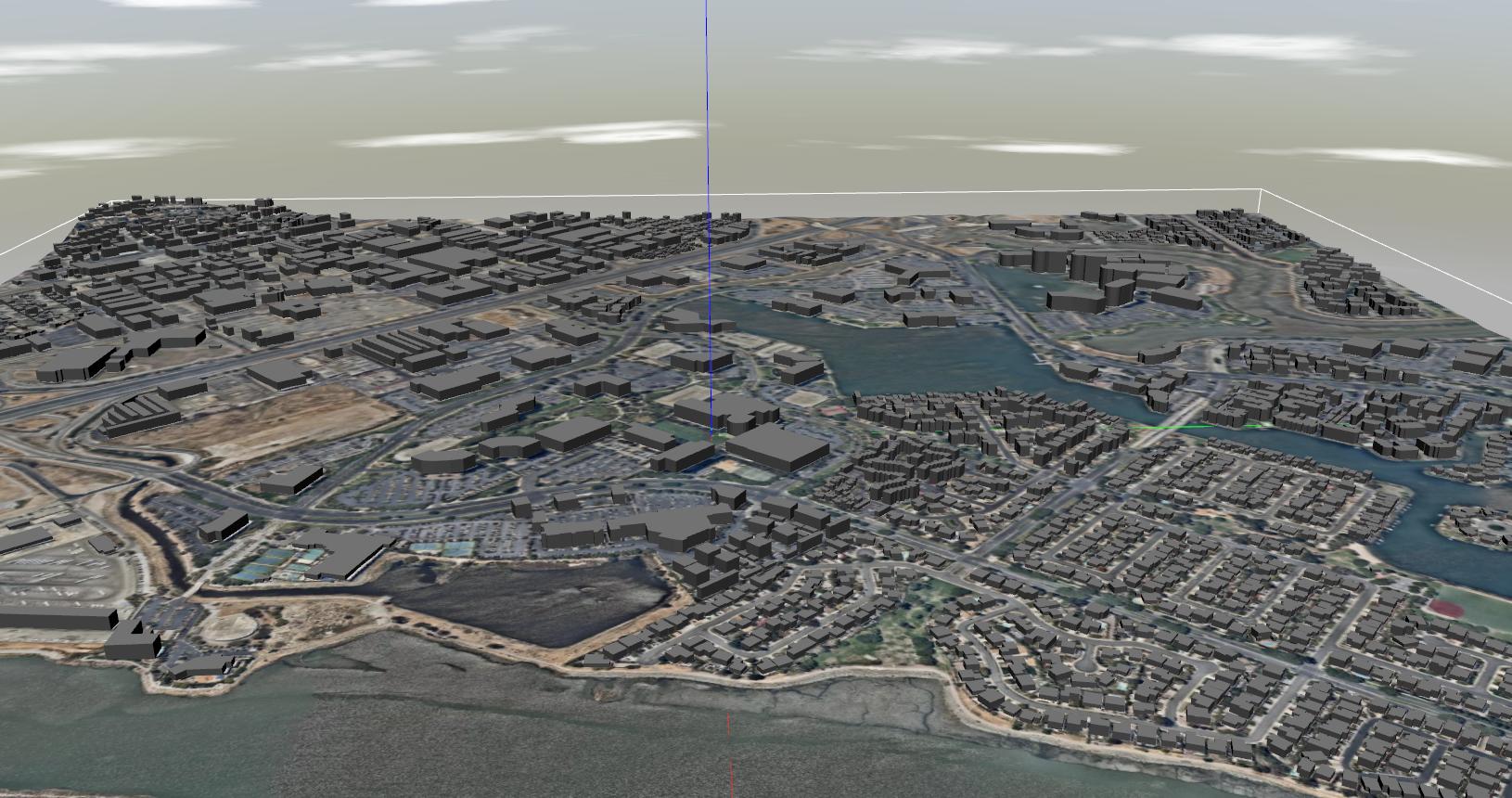
# 湾区
PX4/sitl_gazebo/worlds/baylands.world (打开新窗口)
# KSQL 机场
PX4/sitl_gazebo/worlds/ksql_airport.world (打开新窗口)
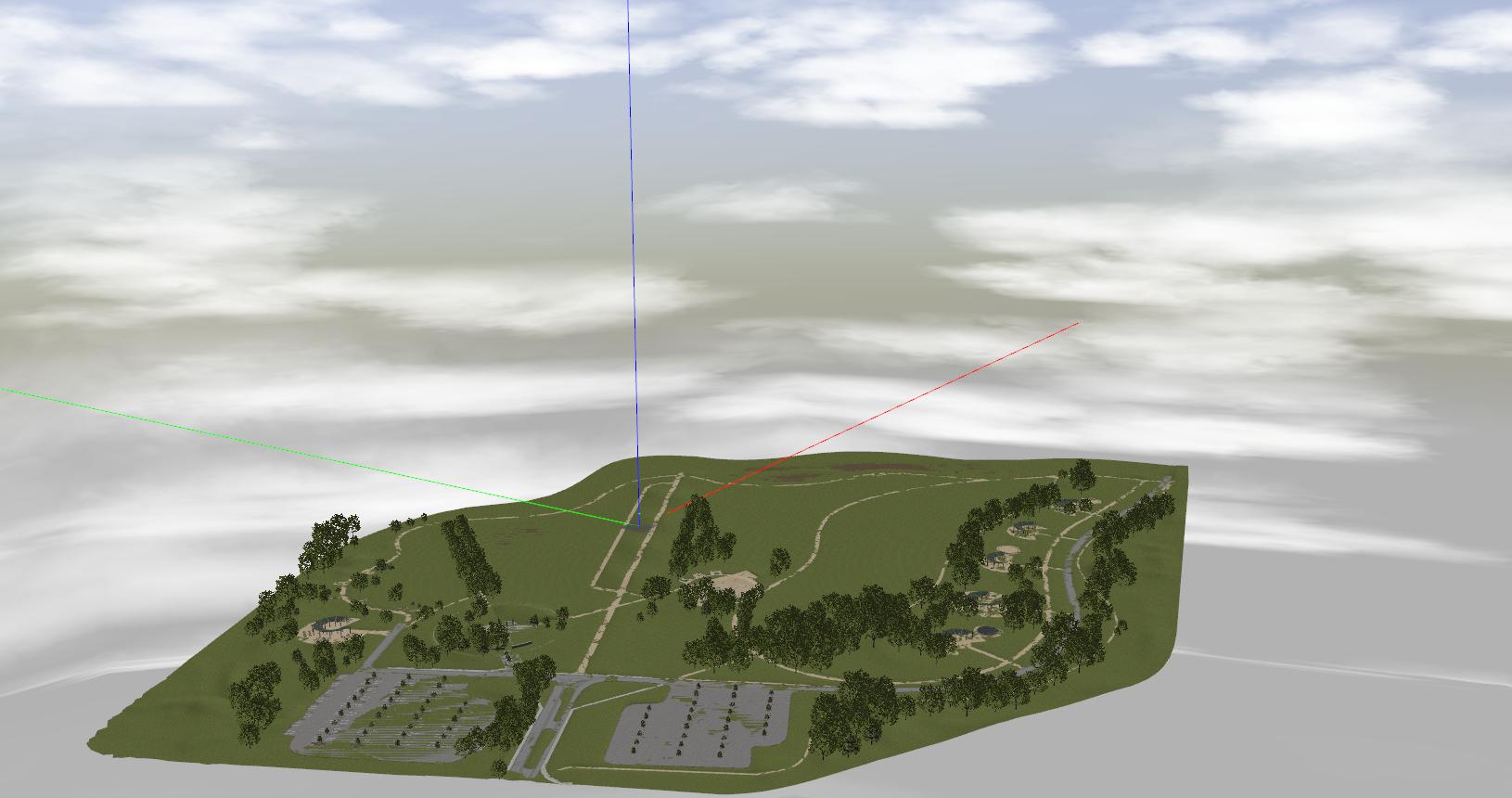
# 麦克米伦机场
PX4/sitl_gazebo/worlds/mcmillan_airfield.world (打开新窗口)
# 索诺玛赛道
PX4/sitl_gazebo/worlds/sonoma_raceway.world (打开新窗口) 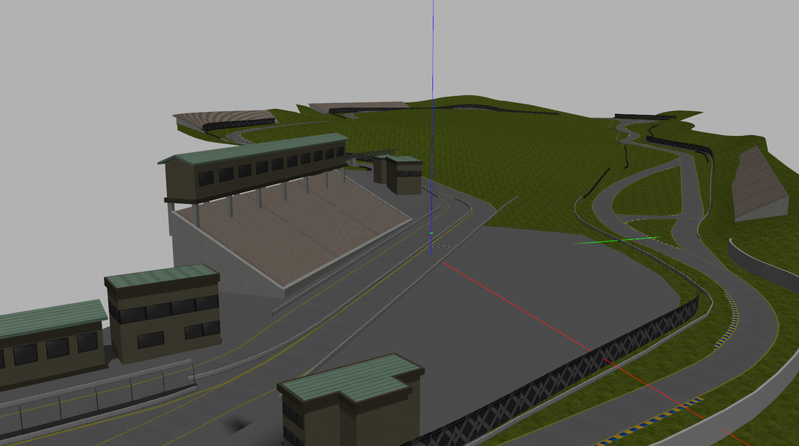
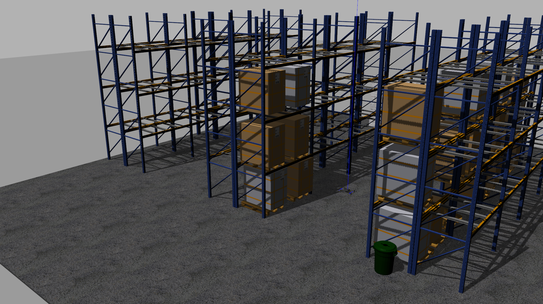
# 仓库
PX4/sitl_gazebo/worlds/warehouse.world (打开新窗口)
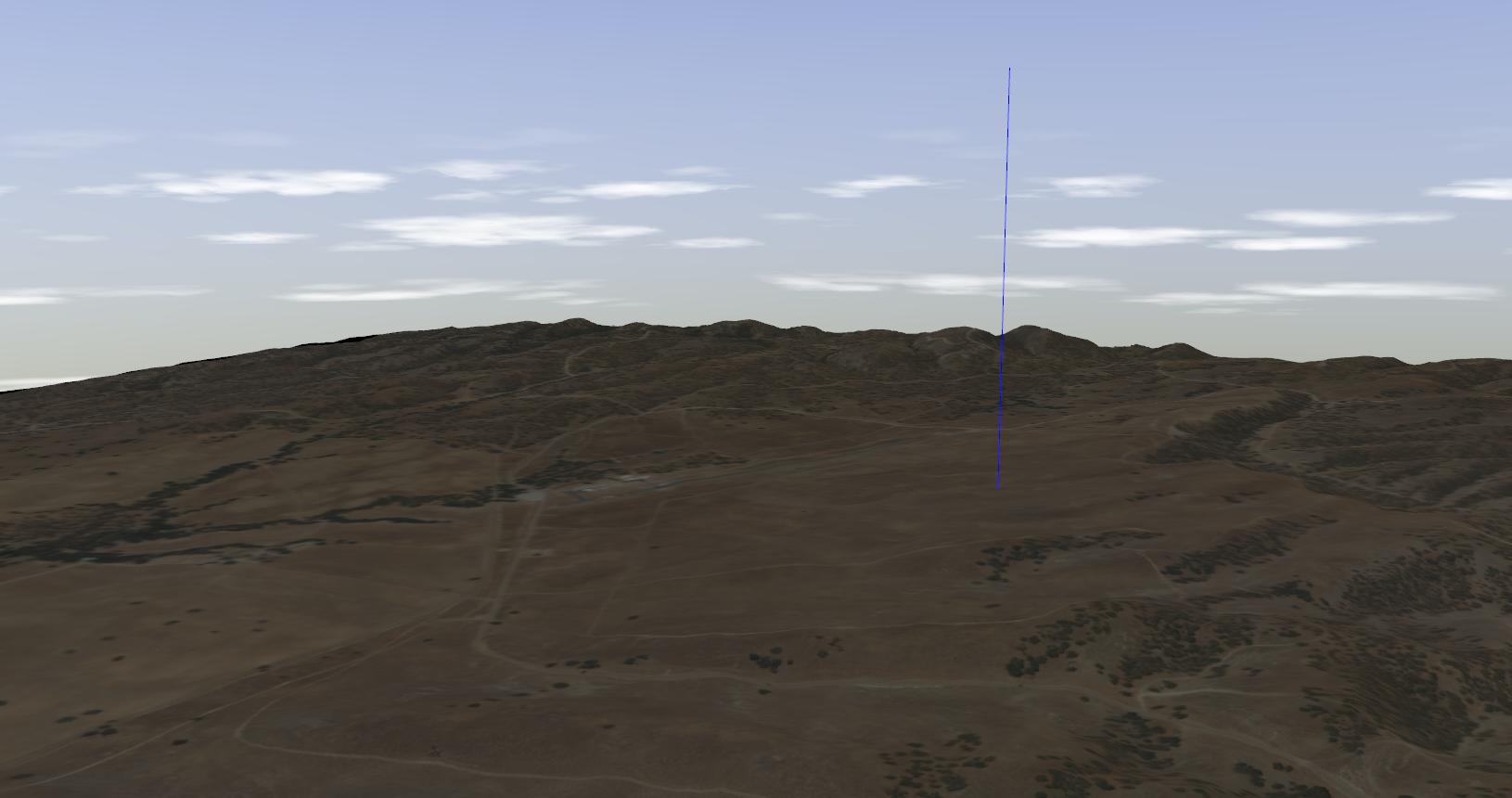
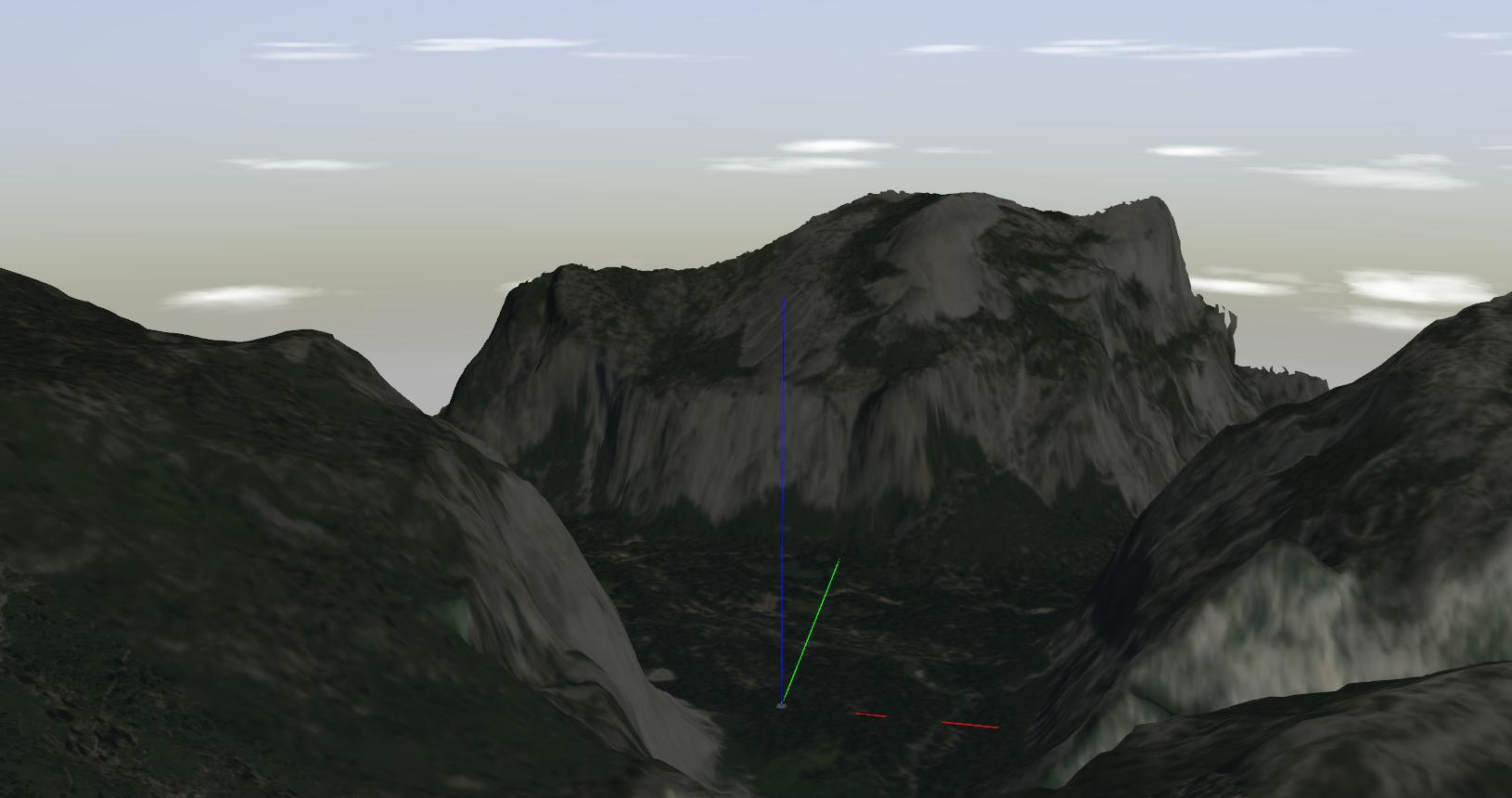
# 优胜美地
PX4/sitl_gazebo/worlds/yosemite.world (打开新窗口)
# 特定型号世界
一些 车型 依赖于特定世界的物理/插件。如果存在与载具模型同名的世界(而不是默认的 空.世界):
特定型号的世界有
- 船.世界 (打开新窗口):包括一个模拟浮力的表面。 船.
- uuv_hippocampus.world (打开新窗口):用于模拟水下环境的空洞世界。 河马校园 UUV.
- 台风_h480.world (打开新窗口):使用过 台风 H480(六旋翼) 载具模型,还包括一个用于启用/禁用视频流的视频部件。这个世界包括一个用于模拟摄像头的仿真场景Gazebo插件。
- iris_irlock.world (打开新窗口):包括一个用于测试的红外信标 精确着陆.