# 使用动作捕捉飞行(VICON、NOKOV、Optitrack)
VICON、NOKOV 和 Optitrack 等室内运动捕捉系统可用于为载具状态估计提供位置和姿态数据,或作为地面实况进行分析。运动捕捉数据可用于更新 PX4 相对于本地原点的本地位置估计值。来自运动捕捉系统的方位(偏航)也可由姿态估计器进行选择性整合。
来自动作捕捉系统的姿态(位置和方向)数据通过 MAVLink 发送给自动驾驶仪,并使用 ATT_POS_MOCAP (打开新窗口) 信息。有关数据表示约定,请参阅下文有关坐标框架的部分。坐标 马夫罗斯 ROS-Mavlink 接口有一个默认插件用于发送此信息。也可使用纯 C/C++ 代码和直接使用 MAVLink 库发送。
# 计算架构
它是 强烈推荐 您可以通过 机载 机载计算机(如 Raspberry Pi、ODroid 等)进行可靠的通信。车载计算机可通过 WiFi 与动作捕捉计算机连接,从而提供可靠的高带宽连接。
大多数标准遥测链路(如 3DR/SiK 无线电设备)都是 不 适用于高带宽运动捕捉应用。
# 坐标框架
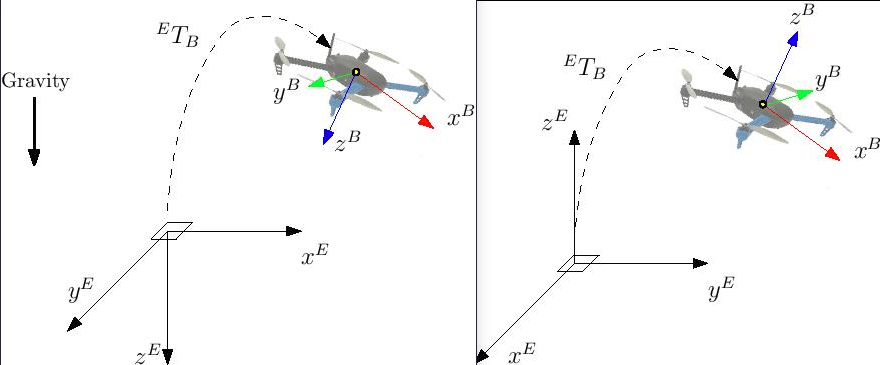
本节将介绍如何使用适当的参照系来设置系统。有多种表示方法,但我们将使用其中两种:ENU 和 NED。
- ENU 是一个地面固定框架,其中 X 轴线指向东方、 Y 指向北和 Z 了。机器人/车体框架为 X 朝前走、 Z 和 Y 朝左。
- NED 已 X 朝北、 Y 东方和 Z 下降。机器人/车体框架有 X 朝前走、 Z 下来 Y 因此。
图框如下所示。左边是 NED,右边是 ENU:
不过,在外部航向估算中,磁北会被忽略,而是用一个与世界航向相对应的矢量来伪造。 x 轴(可在 mocap 校准时自由放置);偏航角将根据本地的 x.
警告
在动作捕捉软件中创建刚体时,请记住首先将机器人与世界对齐 X 轴,否则偏航估计会有初始偏移。
# 估算器选择
对于支持 GPS 的系统,建议使用 EKF2(LPE 已过时,因此不再支持或维护)。如果没有 GPS,建议使用 Q-Estimator,因为它可以在没有磁力计或气压计的情况下工作。
参见 切换状态估计器 了解更多信息。
# EKF2
运动上限的 ROS 主题 mocap_pose_estimate 用于 mocap 系统和 视觉姿势估计 视力。检查 mavros_extras (打开新窗口) 如需更多信息,请联系