# RPi PilotPi Shield
警告
PX4 不生产这种(或任何)自动驾驶仪。请联系 生产商 硬件支持或合规问题。
警告
该飞行控制器支持 PX4 试验性.
PilotPi shield 是在 Raspberry Pi 上直接运行 PX4 自动驾驶仪的全功能解决方案。它被设计成一个低成本但具有高度可扩展性的平台,Linux 和 PX4 都会对其进行持续更新。不需要专有驱动程序,因为所有组件都有 RPi 和 PX4 社区的上游支持。PCB 和原理图也是开源的。
# 快速总结
- 支持的 RPi 板
- 树莓派 2B/3B/3B+/4B
- 支持的操作系统
- 树莓派操作系统
- Ubuntu 服务器(armhf/arm64)
- 加速计/陀螺仪
- ICM42688P
- 磁强计
- IST8310
- 气压计
- MS5611
- PWM:
- PCA9685
- ADC:
- ADS1115
- 动力
- 3~6S 电池,内置电压感应器。
- 通过 USB 电缆为 Pi 供电
- 可用性: 准备装运
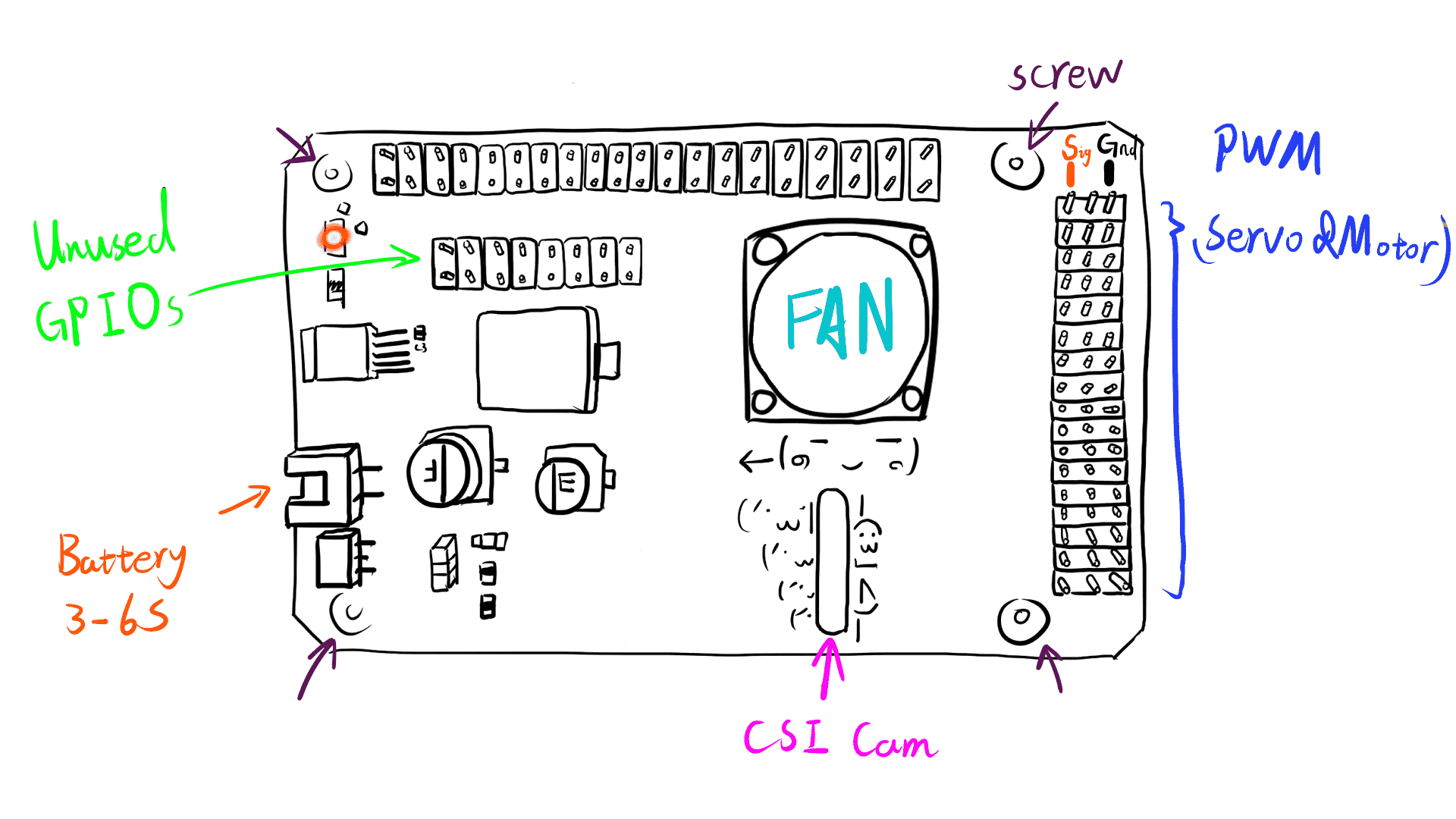
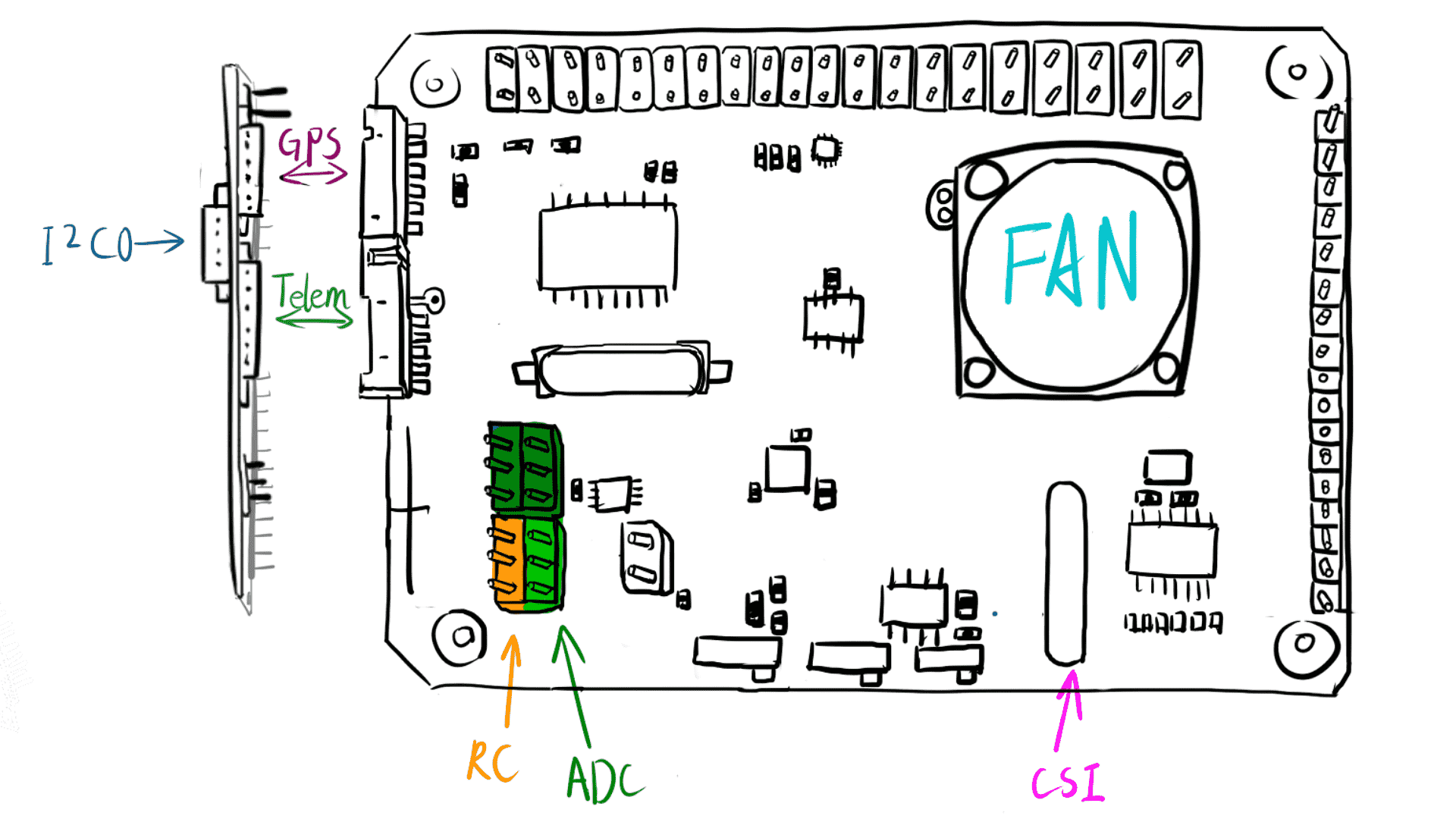
# 连接性
防护罩提供
- 16x PWM 输出通道
- GPS 连接器
- 遥测连接器
- 外部 I2C 总线连接器 (请注意: 与 CSI 摄像机冲突)
- RC 输入端口(SBUS)
- 3x 个 ADC 通道,范围 0~5V
- 2*8 2.54 毫米未使用的 GPIO 连接器
可直接从 RPi 访问:
- 4x USB 连接器
- CSI 连接器请注意: 与外部 I2C 总线冲突)
- 等等
# 建议布线
# 引脚
警告
它仍然使用旧的 GH1.25 接头。布线与 Pixhawk 2.4.8 兼容
# 连接器
# GPS 连接器
映射到 /dev/ttySC0
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | 德克萨斯州 | +3v3 |
| 3 | RX | +3v3 |
| 4 | 北卡罗来纳州 | +3v3 |
| 5 | 北卡罗来纳州 | +3v3 |
| 6 | 接地 | 接地 |
# 遥测连接器
映射到 /dev/ttySC1
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | 德克萨斯州 | +3v3 |
| 3 | RX | +3v3 |
| 4 | CTS | +3v3 |
| 5 | RTS | +3v3 |
| 6 | 接地 | 接地 |
# 外部 I2C 连接器
映射到 /dev/i2c-0
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SCL | +3V3(上拉) |
| 3 | SDA | +3V3(上拉) |
| 4 | 接地 | 接地 |
# RC & ADC2/3/4
RC 映射到 /dev/ttyAMA0 信号逆变器开关位于 RX 线路上。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | RC | +3V3~+5V |
| 2 | VCC | +5V |
| 3 | 接地 | 接地 |
- ADC1 内部与分压器相连,用于监测电池电压。
- ADC2 未使用。
- ADC3 可连接模拟空速传感器。
- ADC4 和 VCC 之间有一个跳线帽,用于监控系统电压水平。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | ADCx | 0V~+5V |
| 2 | VCC | +5V |
| 3 | 接地 | 接地 |
备注
当 "Vref "开关打开时,"VCC "引脚由 REF5050 驱动。
# 电路板顶部可用的未使用 GPIO
| 屏蔽引脚 | BCM | WiringPi | RPi 引脚 |
|---|---|---|---|
| 1 | 3V3 | 3v3 | 3V3 |
| 2 | 5V | 5V | 5V |
| 3 | 4 | 7 | 7 |
| 4 | 14 | 15 | 8 |
| 5 | 17 | 0 | 11 |
| 6 | 27 | 2 | 13 |
| 7 | 22 | 3 | 15 |
| 8 | 23 | 4 | 16 |
| 9 | 7 | 11 | 26 |
| 10 | 5 | 21 | 29 |
| 11 | 6 | 22 | 31 |
| 12 | 12 | 26 | 32 |
| 13 | 13 | 23 | 33 |
| 14 | 16 | 27 | 36 |
| 15 | 26 | 25 | 37 |
| 16 | 接地 | 接地 | 接地 |
# 开关
# RC 逆变器
该开关将决定 RX 线路的信号极性: UART_RX = SW xor RC_INPUT
- 接通:与 SBUS 兼容(信号反相)
- 关:保留
# Vref
ADC 3 & 4 将由 VCC 驱动:
- 如果开启,REF5050 的 Vref 输出
- 如果关闭,则直接从 RPi 的 5V 引脚供电
# 启动模式
该开关连接到引脚 22(BCM25)。系统 rc 脚本将检查其值,并决定 PX4 是否与系统启动同时启动。
- 开:自动启动 PX4
- 关:不启动 PX4
# 开发人员快速入门
请参阅 RPi 上运行的操作系统的具体说明: