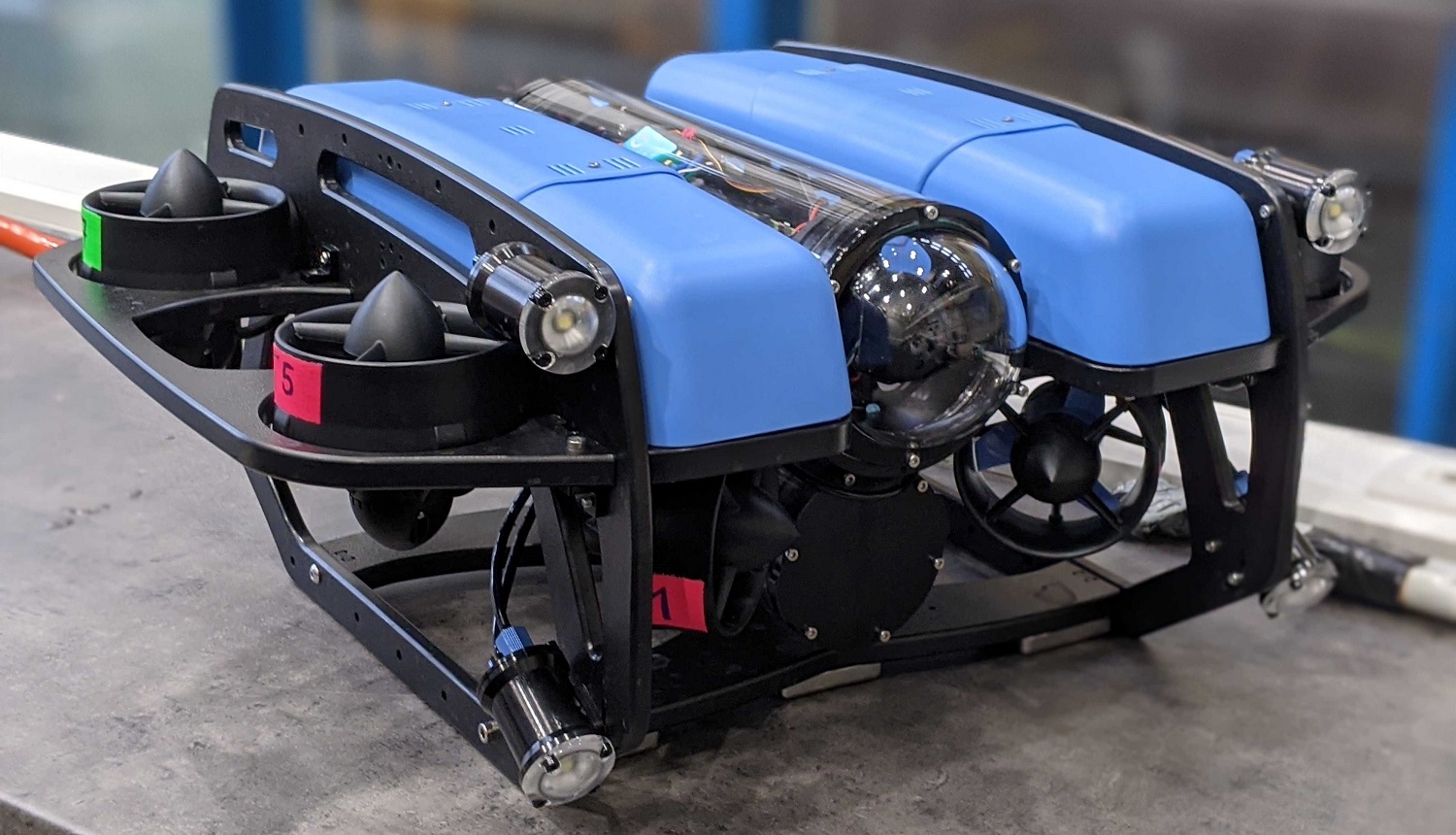
# BlueROV2 (UUV)
BlueROV2 (打开新窗口) 是一款经济实惠的高性能水下航行器,是检查、研究和探险的理想选择。
PX4 提供 实验支持 为 8 推力矢量配置,称为 BlueROV2 重型配置.
# 购买
BlueROV2 (打开新窗口) + BlueROV2 重型配置改装套件 (打开新窗口)
# 电机映射/接线
必须按照 BlueRobotics 为该飞行器提供的标准说明将电机连接至飞行控制器。
然后,载具将与记录在 机身参考:

- MAIN1: 发动机 1 CCW,船首右舷水平,螺旋桨 CCW
- MAIN2: 发动机 2 CCW,船头水平,螺旋桨 CCW
- MAIN3: 发动机 3 CCW,船尾右舷水平,螺旋桨 CW
- MAIN4: 发动机 4 CCW,船尾左舷水平,螺旋桨 CW
- MAIN5: 发动机 5 CCW,船头右舷垂直,螺旋桨 CCW
- MAIN6: 发动机 6 CCW,船首左舷垂直,螺旋桨 CW
- MAIN7: 发动机 7 CCW,船尾右舷垂直,螺旋桨 CW
- MAIN8: 发动机 8 CCW,船尾左舷垂直,螺旋桨 CCW
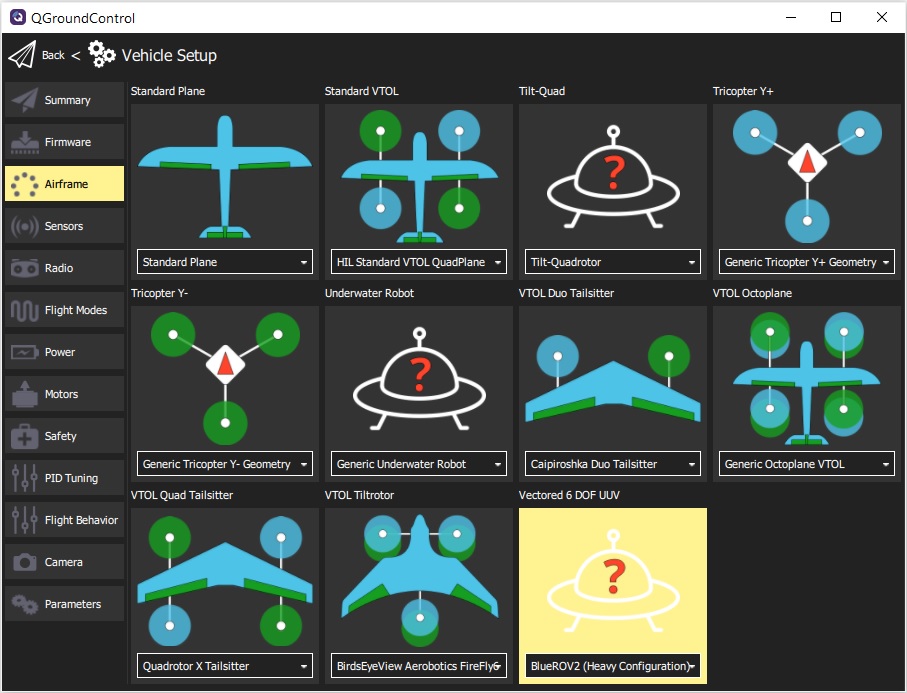
# 机身配置
BlueROV2 没有安装 PX4。您需要